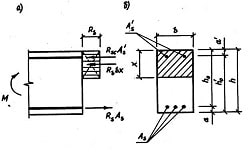
рис а) рис б) . РТК сварочного производства.
рис а) рис б)
Из многочисленных видов сварки промышленные роботы получили основное применение в контактно-точечной, дуговой и электронно-лучевой сварке. При автоматизации сварочного производства промышленные роботы могут применяться в качестве основного либо вспомогательное технологическое оборудование.
В первом случае промышленный робот выполняет сварочные операции и оснащается соответствующим инструментом.
Во втором случае промышленный робот служит для выполнения подъемно-транспортных операций при обслуживании сварочного автомата.
В состав роботизированного комплекса могут входить 2 промышленных робота. Один выполняет сварочные операции, а второй выполняет транспортно-погрузочные работы.
Применение промышленных роботов на сварочных операциях целесообразно в условиях средне и крупносерийного производства, поскольку в условиях единичного и мелкосерийного требуется много времени на переналадку, а в условиях массового производства, лучше применять более производительные сварочные автоматы.
Сравнительные характеристики дуговой и контактной сварки:
Характеристика
Дуговая
Контактная
Точность перемещения
0,3-0,5 от диаметра электродов
±1,0 мм
Скорость перемещения, м/ч
10-180
180-360
Размер рабочей зоны, м
1*1*10
1*1*1
Грузоподъемность, кг
5-10
20-30
Макс.число управляем.координат
3/3
3/3
Контактная сварка осуществляется путём нагрева импульсным электрическим током. Рабочим инструментом являются сварочные клещи, в которых закрепляется один электрод, а второй к свареваемому изделию. В конструкции ПР должна быть предусмотрена возможность размещения сварочного трансформатора и проводящего кабеля. УУ должно быть рассчитано на работу в условиях сильных ЭМ помех. Основная область применения – автомобилестроение.
Дуговая сварка является более сложным процессом, поскольку требуется осуществлять непрерывный контроль за положением горелки по сложной траектории. Основным инструментом является газовая горелка. В функции УУ ПР при дуговой сварке входит реализация алгоритмов поддержания параметров сварки (напряжение, ток, приток газа и т.д.), а также адаптивных алгоритмов поиска начала шва.
|