РТК сборочного производства.
На сборочном производстве в машиностроении применяется до 40-45% промышленных роботов, а в приборостроении 50-60% от общего числа.
Несмотря на высокую трудоёмкость сборочные операции имеют ограниченную степень автоматизации, что связано с ограниченными возможностями сборочных автоматов.
В зависимости от материальных потоков сборочного производства различают четыре основные схемы:
1) последовательная 
2) сходящаяся 
3) ветвящаяся 
4) с обратной связью 
СУ – сборочный участок
Основными требованиями предъявляемыми к промышленным роботам являются:
1)высокая точность позиционирования 0,01 мм-0,5 мм
2)высокое быстродействие ϑ ≥1 м/с
3)большое число степеней подвижности n >3
4)захватные устройства должны быть достаточной грузоподъемности для манипулирования деталями различной массы.
m=1-20 кг – 40%
m < 1 кг -50%
m > 20 кг – 10%
5)универсальность захватных устройств
6)система управления промышленных роботов должна обеспечивать быструю и частую переналадку
Тип модели
Грузоподъемность, кг
Погр.позици-онир, мм
Число степ.позицион.
Особенность
SCARA
3-10
0,04
Использ.блока захв.устройств
PUMA
5-15
0,01
5-6
Использов. СТЗ
Pragma
10-15
0,05-0,2
4-6
-
РМ-01
2,5
0,01
Расшир.возможн. по использ.дискр.сигналов
Для обеспечения функционирования системы сборки необходимо наличие следующих подсистем:
1)автоматизированная транспортно-складская система
2) система инструментального обеспечения
3)система
4) система управления.
Процесс сборки состоит из четырёх этапов:
1) Ориентация
2) Этап сопряжения
3) Этап закрепления
4) Контроль
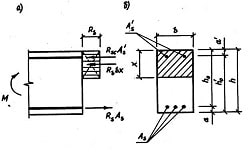
Наиболее трудоёмким этапом является сопряжение. Этап сопряжения может быть реализован с помощью самоориетации (рис.а) или ориентацией методом направленного поиска (рис.б)

|