Формирование программ управления трдд см
Похожие статьи вашей тематики
Программа управления влияет на протекание характеристик двигателя. Важными являются режимы, на которых от двигателя требуют получения наиболее высоких значений тяги. У всех типов самолетов значительную роль играет обеспечение высокой экономичности на крейсерских режимах полета.
Другим важным требованием к программе управления двигателя является обеспечение эксплуатационных ограничений. Оно сводится к недопущению механических и тепловых перегрузок элементов конструкции двигателя и к предотвращению неустойчивых режимов работы каскадов компрессора.
Прочностные ограничения вводятся из условия сохранения допустимых запасов прочности в элементах конструкции при изменении условий полета и режимов работы двигателя. Характерным для всех ГТД является ограничение максимально-допустимых частот вращения роторов n max, а также максимально-допустимой температуры газа перед турбиной  . Указанные параметры очень сильно влияют на запасы прочности лопаток и дисков каскадов турбомашин. . Указанные параметры очень сильно влияют на запасы прочности лопаток и дисков каскадов турбомашин.
| 
Рис. 3.8. К определению ограничения
по DКу.min
| Ограничения по запасу устойчивости каскадов компрессора вводится в тех случаях, когда величина запаса устойчивости D К у одного из каскадов приближается к минимально допустимому при данных условиях полета значению. У ТРДДсм при снижении приведенных частот вращения каскадов компрессоров в условиях их реального регулирования величины D К у.ВД и D К у.НД обычно повышаются и ограничений по запасу устойчивости вводить не требуется. Ограничение по D К у.min у этих двигателей, как правило, наступает в области режимов, где приведенные частоты вращения каскадов компрессора достигают величин более 100% и дальнейшее повышение  уже недопустимо. Тогда ограничиваемыми параметрами являются величины уже недопустимо. Тогда ограничиваемыми параметрами являются величины  или или  . .
Определение предельно допустимых значений приведенных частот вращения каскадов компрессора производится после построения рабочих линий на их характеристиках. Способ определения допустимого значения D К у.доп КВД в качестве примера иллюстрирует рис. 3.8. Как видно, в расчетной точке «р» (при  = 1,0) величина D К у.р здесь составляет 15%. Но при = 1,0) величина D К у.р здесь составляет 15%. Но при  = 1,05 (точка 1) запас устойчивости снижается до минимально-допустимого значения, которое в данном примере принято равным 10%, а при = 1,1 (точка «в») уже D К у = 0, а следовательно, возникает потеря устойчивости КВД («верхний срыв»). В данном случае величине = 1,05 (точка 1) запас устойчивости снижается до минимально-допустимого значения, которое в данном примере принято равным 10%, а при = 1,1 (точка «в») уже D К у = 0, а следовательно, возникает потеря устойчивости КВД («верхний срыв»). В данном случае величине  = 1,05 соответствует вполне определенная величина = 1,05 соответствует вполне определенная величина  , которая и принимается в качестве предельно-допустимой. У ТРДДсм всякий раз, когда программой управления задана рабочая линия на характеристике КНД, между рабочими точками на рабочих линиях КНД и КВД устанавливается однозначная связь, и значению , которая и принимается в качестве предельно-допустимой. У ТРДДсм всякий раз, когда программой управления задана рабочая линия на характеристике КНД, между рабочими точками на рабочих линиях КНД и КВД устанавливается однозначная связь, и значению  однозначно соответствует определенная величина однозначно соответствует определенная величина  . Поэтому независимо от того, какой каскад вызывает необходимость ограничения максимально допустимой приведенной частоты вращения,это ограничение вводится исходя из условия . Поэтому независимо от того, какой каскад вызывает необходимость ограничения максимально допустимой приведенной частоты вращения,это ограничение вводится исходя из условия  . .
Если для двигателя установлены величины основных ограничиваемых параметров, то может быть определена (сформирована) программа управления на режимах ограничения. Переход на повышенные режимы работы двигателя связан с одновременным увеличением температуры  , а также физических и приведенных частот вращения роторов. , а также физических и приведенных частот вращения роторов.
Под режимами ограничения подразумеваются такие режимы, при которых какой-либо из ограничиваемых параметров достигает предельно допустимого значения. В условиях ограничения двигатель, как правило, работает на максимальном режиме.
Формирование программы управления для максимального режима рассмотрим в качестве примера при условии, что система управления двигателем обеспечивает заданное расположение рабочей линии на характеристике КНД и свободным является только один управляющий фактор – расход топлива G т. В этом случае в качестве управляемого может быть принят только один какой-либо параметр. Им может быть  , ,  , ,  , ,  . Задание закона изменения одного из этих параметров однозначно определяет изменение всех остальных параметров. . Задание закона изменения одного из этих параметров однозначно определяет изменение всех остальных параметров.
Программы управления изображают в виде зависимостей управляемых параметров от температуры  , которая характеризует влияние на двигатель внешних условий. Изменение условий полета (М Н и Н) или атмосферных условий (рН, ТН) приводит к изменению температуры , которая характеризует влияние на двигатель внешних условий. Изменение условий полета (М Н и Н) или атмосферных условий (рН, ТН) приводит к изменению температуры  на входе в двигатель и соответственно приведенных частот вращения роторов и на входе в двигатель и соответственно приведенных частот вращения роторов и  , а как следствие этого, к изменению основных параметров элементов двигателя по их рабочим линиям ( , а как следствие этого, к изменению основных параметров элементов двигателя по их рабочим линиям ( ; ;  ; ;  ; ;  ; ;  ; ;  ; ;  ,…) и параметров ТКМ ( ,…) и параметров ТКМ ( ; ;  ; ;  ; ;  ; ;  ; ;  ,…). Взаимосвязь параметров при той или иной программе управления будет в каждом конкретном случае своя. Она зависит от расчетных параметров и индивидуальных свойств характеристики элементов двигателя. ,…). Взаимосвязь параметров при той или иной программе управления будет в каждом конкретном случае своя. Она зависит от расчетных параметров и индивидуальных свойств характеристики элементов двигателя.
При каждом заданном значении температуры  на предельных режимахможно вводить ограничение только на один какой-либо параметр (по максимально-допустимой его величине). на предельных режимахможно вводить ограничение только на один какой-либо параметр (по максимально-допустимой его величине).
Формирование программы управления на предельных режимах сводится к выявлению на этих режимах ограничиваемых параметров в зависимости от температуры  . Вначале назначают, исходя из газодинамических и прочностных расчетов, предельные значения ограничиваемых параметров. Они могут быть либо постоянными величинами (при любых условиях полета) . Вначале назначают, исходя из газодинамических и прочностных расчетов, предельные значения ограничиваемых параметров. Они могут быть либо постоянными величинами (при любых условиях полета)
 ; ;  ; ;  ; ;  , (3.9) , (3.9)
либо величинами, зависящими от температуры  . .
Зная требуемое изменение ограничиваемых параметров по температуре  и имея взаимосвязь их с остальными параметрами, устанавливаемую характеристиками ТКМ, находят значения параметров и имея взаимосвязь их с остальными параметрами, устанавливаемую характеристиками ТКМ, находят значения параметров  , при которых может наступать каждое из рассмотренных ограничений. , при которых может наступать каждое из рассмотренных ограничений.
Для каждого ограничиваемого параметра величина имеет свою функциональную зависимость от температуры . В частности при однопараметрической системе управления (когда задана рабочая линия на характеристике КНД) все параметры ТКМ взаимосвязаны таким образом, что задание какого-либо одного из ограничиваемых параметров позволяет определить все остальные – в том числе значения , соответствующие этому ограничиваемому параметру.
Технология определения этих зависимостей для различных ограничений состоит в следующем:
1. Для ограничения по эта зависимость, очевидно, имеет вид:  . .
2. Зависимость для ограничения по  определяется из соотношения определяется из соотношения  . .
Подставляя в эту формулу величину  , найденную по условиям прочности, и варьируя температурой , получаем искомую функцию , найденную по условиям прочности, и варьируя температурой , получаем искомую функцию  . .
3. Величины для ограничения по  определяются через параметр определяются через параметр  . По этим величинам, найденным при различных значениях температуры , с помощью характеристики ТКМ определяются зависимость . По этим величинам, найденным при различных значениях температуры , с помощью характеристики ТКМ определяются зависимость  для предельных режимов по для предельных режимов по  . .
4. Зависимость  для ограничения по для ограничения по  определяется с использованием формулы (3.7), по которой определяется с использованием формулы (3.7), по которой  , а переход к осуществляется с использованием зависимости , а переход к осуществляется с использованием зависимости  , взятой из характеристик ТКМ. , взятой из характеристик ТКМ.
Характер зависимостей от при рассматриваемых ограничениях показан на рис. 3.9.
Из четырех рассмотренных управляемых параметров (, ,  , ) в однопараметрической системе управления двухвального ТРДДсм при стабилизации одного из них остальные изменяются, причем это изменение однозначно определяется температурой на входе в двигатель, либо величиной , ) в однопараметрической системе управления двухвального ТРДДсм при стабилизации одного из них остальные изменяются, причем это изменение однозначно определяется температурой на входе в двигатель, либо величиной  . .
Определив значения для каждого из рассматриваемых ограничиваемых величин, строят графики зависимостей этих величин от температуры . Вследствие различного наклона указанных кривых они между собой пересекаются, как показано на рис. 3.9.
|
| |
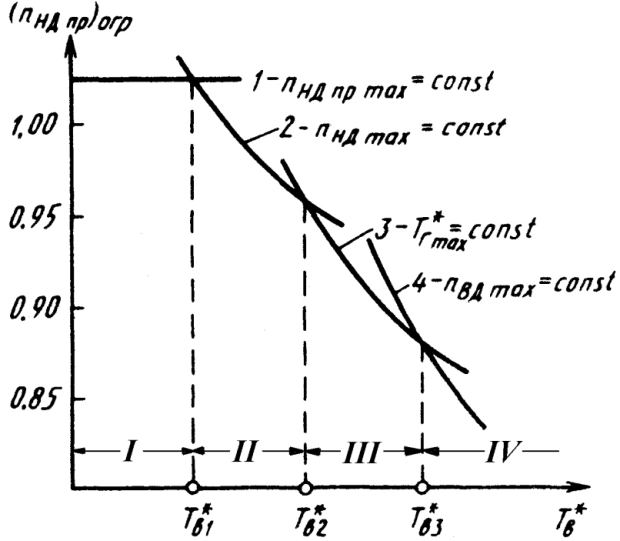
Рис. 3.9. Определение линии
предельных режимов
|
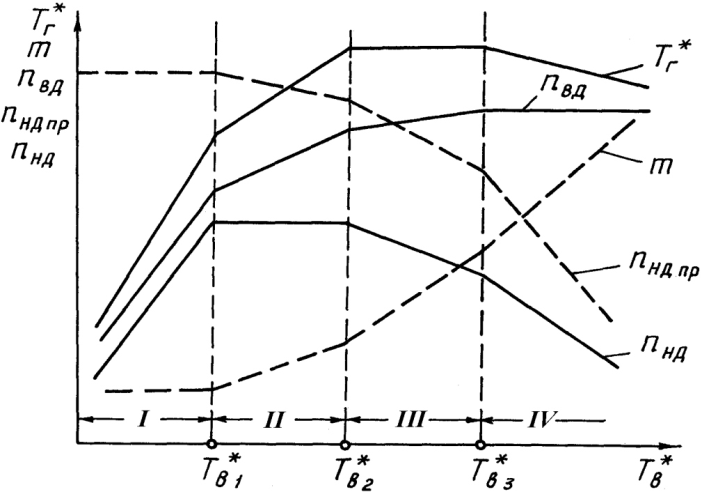
Рис. 3.10. Комбинированная программа
управления ТРДДсм
| Огибающая этого семейства кривых снизу, именуемая линией предельных режимов (ЛПР), дает комбинированную программу управления двигателя при заданных ограничениях. Как видно, в каждом диапазоне температур (между вертикальными штриховыми линиями) действует свое какое-либо ограничение. Точки излома указанной линии предельных режимов соответствуют переходу от одного ограничения к другому. Зная, что в диапазоне возможного изменения температуры какой из параметров выходит на ограничение, далее находят изменение всех остальных управляемых параметров от температуры .
На рис. 3.10 в качестве примера изображена комбинированная программа управления ТРДДсм на предельных режимах, имеющая четыре участка: I – n НД.пр.max = const; II – n НД.max = const; III –  = const; IV – n ВД. max = const. = const; IV – n ВД. max = const.
На участке I при низких значениях температур ограничиваемым параметром является , причем условию n НД.пр = const соответствует n ВД.пр = const и поэтому соблюдается подобие режимов ТКМ. В этом случае с ростом температуры  , как указывалось, n НД и n ВД увеличиваются пропорционально , как указывалось, n НД и n ВД увеличиваются пропорционально  , а температура , а температура  изменяется пропорционально . Такое управление обеспечивает постоянство величин D К у.ВД и D К у.НД. изменяется пропорционально . Такое управление обеспечивает постоянство величин D К у.ВД и D К у.НД.
На участке II достигается ограничение по  , причем поддержание n НД.max = const требует значительного увеличения температуры , причем поддержание n НД.max = const требует значительного увеличения температуры  , что вызывает раскрутку ротора высокого давления. Следовательно, на участке II автоматически обеспечивается «температурная раскрутка» РВД при увеличении температуры , что вызывает раскрутку ротора высокого давления. Следовательно, на участке II автоматически обеспечивается «температурная раскрутка» РВД при увеличении температуры  (росте числа М полета). Это способствует увеличению крутизны нарастания тяги по числу М полета, что благоприятно сказывается на соотношении потребных и располагаемых тяг. (росте числа М полета). Это способствует увеличению крутизны нарастания тяги по числу М полета, что благоприятно сказывается на соотношении потребных и располагаемых тяг.
Физические причины появления «температурной раскрутки» РВД, т.е. возрастания  и при n НД = const и увеличении связано с особенностями рассогласования ступеней каскадов компрессора. Увеличение температуры на входе в компрессор вызывает уменьшение приведенных частот вращения и степеней повышения давления обоих каскадов. Вызванное этим рассогласование ступеней приводит к тому, что первые ступени переходят на повышенные углы атаки, они «затяжеляются», а последние ступени переходят на пониженные углы атаки, они «облегчаются». Как распределяются «облегчающиеся» и «затяжеляющиеся» ступени в каскадах по их количеству зависит от расчетной величины и при n НД = const и увеличении связано с особенностями рассогласования ступеней каскадов компрессора. Увеличение температуры на входе в компрессор вызывает уменьшение приведенных частот вращения и степеней повышения давления обоих каскадов. Вызванное этим рассогласование ступеней приводит к тому, что первые ступени переходят на повышенные углы атаки, они «затяжеляются», а последние ступени переходят на пониженные углы атаки, они «облегчаются». Как распределяются «облегчающиеся» и «затяжеляющиеся» ступени в каскадах по их количеству зависит от расчетной величины  и ее распределения между КНД и КВД. Для современных ТРДДсм они таковы, что «затяжеляются» все ступени КНД и часть первых ступеней КВД, а «облегчаются» последние ступени КВД. и ее распределения между КНД и КВД. Для современных ТРДДсм они таковы, что «затяжеляются» все ступени КНД и часть первых ступеней КВД, а «облегчаются» последние ступени КВД.
Следовательно, для поддержания n НД = const, поскольку КНД «затяжеляется», нужно повышать температуру  . Это и является причиной возрастания n ВД, т.е. «температурной раскрутки» РВД. Следует отметить, что «затяжелению» РНД с увеличением у двухвальных ТРДДсм, в отличие от ТРД, дополнительно способствует возрастание степени двухконтурности . Это и является причиной возрастания n ВД, т.е. «температурной раскрутки» РВД. Следует отметить, что «затяжелению» РНД с увеличением у двухвальных ТРДДсм, в отличие от ТРД, дополнительно способствует возрастание степени двухконтурности  . Повышение . Повышение  у ТРДДсм при увеличении (по сравнению с двухвальным ГГ ТРД) требует дополнительного повышения температуры газа перед турбиной для обеспечения n НД = const. Интенсивность раскрутки РВД зависит также от параметров и свойств самого КВД. Если КВД имеет у ТРДДсм при увеличении (по сравнению с двухвальным ГГ ТРД) требует дополнительного повышения температуры газа перед турбиной для обеспечения n НД = const. Интенсивность раскрутки РВД зависит также от параметров и свойств самого КВД. Если КВД имеет  , то, как указывалось, он при увеличении обычно склонен к «затяжелению»; а при меньших значениях , то, как указывалось, он при увеличении обычно склонен к «затяжелению»; а при меньших значениях  – к «облегчению». Влияет на поведение КВД его регулирование поворотом лопаток НА группы первых ступеней. При увеличении и снижении лопатки НА КВД поворачиваются на прикрытие, т.е. на уменьшение углов атаки регулируемых ступеней, что снижает степень «затяжеления» КВД, либо вызывает его «облегчение». Если КВД склонен к «затяжелению», то увеличение на участке II, где n НД =const, будет происходить медленнее, чем в случае «облегчающегося» КВД, но температурная раскрутка на этом участке всегда будет иметь место. – к «облегчению». Влияет на поведение КВД его регулирование поворотом лопаток НА группы первых ступеней. При увеличении и снижении лопатки НА КВД поворачиваются на прикрытие, т.е. на уменьшение углов атаки регулируемых ступеней, что снижает степень «затяжеления» КВД, либо вызывает его «облегчение». Если КВД склонен к «затяжелению», то увеличение на участке II, где n НД =const, будет происходить медленнее, чем в случае «облегчающегося» КВД, но температурная раскрутка на этом участке всегда будет иметь место.
На участке III (рис. 3.10) своего максимально допустимого значения достигает температура  . При поддержании . При поддержании  в рассматриваемом примере, как видно, продолжается увеличение с ростом температуры (в данном случае КВД является «облегчающимся»). Вступление в работу ограничителя температуры в рассматриваемом примере, как видно, продолжается увеличение с ростом температуры (в данном случае КВД является «облегчающимся»). Вступление в работу ограничителя температуры  приводит к замедлению темпа нарастания по , а частота вращения начинает падать. приводит к замедлению темпа нарастания по , а частота вращения начинает падать.
На участке IV в случае «облегчающегося» КВД уже возникает потребность ограничения  , что сопровождается уменьшением , что сопровождается уменьшением  и еще более сильным, чем на участке III, снижением с увеличением . и еще более сильным, чем на участке III, снижением с увеличением .
Степень двухконтурности и скольжение роторов на участке I сохраняются неизменными, так как здесь n НД.пр = const и n ВД.пр = const, а далее с ростом величина  все время уменьшается, поэтому степень двухконтурности все время уменьшается, поэтому степень двухконтурности  и скольжение роторов и скольжение роторов  возрастают. Чем интенсивнее снижается , тем значительнее повышаются возрастают. Чем интенсивнее снижается , тем значительнее повышаются  и и  . .
Причины увеличения степени двухконтурности и скольжения у ТРДДсм при снижении были рассмотрены ранее. Как указывалось, величина определяется по формуле (3.1). Она при повышении увеличивается вследствие снижения q (lв)ВД и повышения q (lII).
Темп нарастания тяги по числу М полета определяется в первую очередь интенсивностью повышения с ростом М Н температуры  и расхода воздуха G вS. и расхода воздуха G вS.
Глава 4
|






