Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Фаззі-керування гальмуванням візка мостовогоСодержание книги
Поиск на нашем сайте Крана
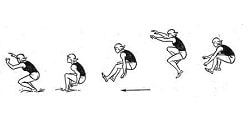
При русі візка мостового крана вантаж, підвішений як маятник, відхиляється в сторону протилежну напряму руху і при зупинці здійснює затухаючі коливання відносно вертикальної осі.
візка масою
Візок з підвішеним вантажем як об’єкт керування є складною двомасовою системою, яка описується рівнянням Логранжа другого роду для координат мас
(14.13)
де Т – кінетична енергія системи; Після диференціювання (14.13) отримаємо такі рівняння:
Розв’язавши (14.14) відносно кута
Якщо електродвигун живити від керованого джерела моменту, наприклад, від частотного перетворювача з прямим керуванням мо-менту, то сила Виконати синтез регулятора аналітичним шляхом об’єктом, який описується рівнянням (14.15), практично неможливо. Керувати та-ким об’єктом можна за допомогою ФР за лінгвістичним алгоритмом у виді двох умов: Ø якщо маса Ø якщо маса Згідно з наведеними алгоритмами потрібно скласти таблицю правил для ФР з двома вхідними змінними: кутом відхилення маси Ø згідно першої умови заповнюють стовпець таблиці для Ø згідно другої умови заповнюють рядок для
Рис. 14.9. Таблиця правил фаззі-регулятора (а) і функції належності вихідної змінної (б) Для тих поєднань термів, які не виникають, відповідні клітинки таблиці залишаються незаповненими (рис.14.9,а) Наведену таблицю доповнюють функціями належності вхідних змінних у відносних одиницях. Для цього експерт повинен визначи-ти можливий діапазон зміни Фаззі-множини і функції належності вихідної змінної наведені на рис.14.9,б. Максимальну силу, що діє на візок, визначаємо за потужністю двигуна:
Рис. 14.10. Структурна схема моделювання системи фаззі-керування
де
Реалізувати даний ФР можна за допомогою програмованого ло-гічного контролера, який може виконувати процедури фаззіфікації, логічного висновку і дефаззіфікації, написані, наприклад, мовою С++.
Контрольні запитання
1. Які параметри автоматизованого електропривода можуть змі-нюватись? 2. На які види поділяють безпошукові адаптивні системи керува-ння? 3. Якою ланкою можна представити еталонну модель? 4. Які є умови реалізації керування за еталонною моделлю? 5. У чому відмінність фаззі-керування від керування за класич-ною логікою? 6. Чим характеризуються фаззі-множини? 7. Що представляють собою терми? 8. На підставі чого визначають кількість термів? 9. З яких елементів складається фаззі-регулятор? 10. Як проводять перевірку систем керування з фаззі-регулятора-ми? Розділ 15
Слідкуючий електропривод
Загальна характеристика
Слідкуючий електропривод призначений для переміщення робо-чого органу (РО) у відповідності з задаючим сигналом, який може змінюватись за довільним законом. Задаючим сигналом може бути рухомий об’єкт – об’єкт стеження, наприклад, літак, за яким слідкує радар; одна половина розвідного мосту; командний пристрій з руч-ним керуванням тощо. Отже, слідкуючий електропривод забезпечує слідкування (стеження) РО за наперед не визначеним задаючим сиг-налом. При цьому слідкування повинне відбуватися з необхідною точністю як у часі, так і у просторі. У загальному випадку РО пови-нен рухатись по траєкторії, яку формує задаючий пристрій. Якщо робочий орган потрібно рухати по просторовій траєкторії, то для його переміщення потрібні три слідуючі електроприводи, забезпечуючи рух по трьох координатах. Якщо додатково потрібно ще і повертати РО навколо своїх вісей, то це можуть забезпечити п’ять приводів. До таких багато координатних механізмів віднося-ться роботи та маніпулятори, які представляють собою складні взаємозв’язані електромеханічні системи. Основним показником роботи слідкуючого електропривода є точність слідкування, тобто різниця між траєкторією, яку формує задаючий пристрій, і траєкторією робочого органу. Цей показник називають іще розузгодженням чи похибкою. При обертовому русі – це різниця між задаючим кутом
Різновидом слідкуючого електропривода є позиційний електро-привод, який забезпечує переміщення РО з одного положення в інше з необхідною точністю. При цьому траекторія руху наперед ві-дома, але часовий графік переміщення може бути довільним або визначитись технологічним процесом (переміщення кабіни ліфта, візка мостового крана тощо). Режим відпрацювання електроприводом заданого переміщення називається позиціюванням. Структурною ознакою слідкуючого і позиційного електроприво-дів є від’ємний зворотний зв'язок за переміщенням (рис.15.1). Їх функціональна схема складається з двох частин: системи керування
Рис. 15.1. Функціональна схема слідкуючого електропривода
переміщенням СКП і системи регулювання швидкості, до складу якої входять керований перетворювач енергії КПЕ, двигун Д, пере-давальний пристрій ПП і робочий орган РО. Елементи КПЕ і Д представляють собою регульований електропривод постійного чи змінного струму, в якому вихідною координатою є швидкість РО Система керування переміщенням складається з задаючого при-строю ЗП, вимірювача розузгодження ВР з вихідною напругою В залежності від способу задання переміщення РО розрізняють три режими керування: Ø керування за розузгодженням, коли переміщення об’єкта стеження наперед невідомо і керування ведеться за різницею задаю-чого сигналу і сигналу зворотного зв’язку (формула 15.1); Ø ручний, коли завдання на переміщення РО здійснюється по-воротом вручну вісі задаючого пристрою; Ø програмний, коли закон переміщення відомий і формується у виді сигналів Перші два режими характерні для слідкуючого електропривода, а третій – для позиційного. За способом формування керуючого впливу слідкуючі електро-приводи поділяються на дискретні (релейні) і неперервні. Дискретний слідкуючий електропривод характеризується тим, що напруга на виконавчий двигун подається тоді, коли кут розузго-дження досягає заданого значення
|
||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 419; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.103 (0.006 с.) |

 Чим більша швидкість
Чим більша швидкість тим біль-ший буде кут відхилення
тим біль-ший буде кут відхилення  вантажу масою
вантажу масою  і тим триваліше буде розка-чуватись вантаж, що зни-жує продуктивність мосто-вого крана (рис.14.8). То-му метою керування рухом візка буде його зупинка у будь-якому положенні без розкачування вантажу.
і тим триваліше буде розка-чуватись вантаж, що зни-жує продуктивність мосто-вого крана (рис.14.8). То-му метою керування рухом візка буде його зупинка у будь-якому положенні без розкачування вантажу. Зазвичай, досвідчений кранівник, знаючи місце зупинки і спостерігаючи за положенням вантажу, за допомогою командоконтролера так змінює швидкість і момент електродвигуна, щоби зупинити візок без розкачування вантажу. Фаззі-регулятор повинен замінити оператора. Для цього на візку додатково встановлюють давач кута відхилення маятникової підвіски від вертикалі ДК.
Зазвичай, досвідчений кранівник, знаючи місце зупинки і спостерігаючи за положенням вантажу, за допомогою командоконтролера так змінює швидкість і момент електродвигуна, щоби зупинити візок без розкачування вантажу. Фаззі-регулятор повинен замінити оператора. Для цього на візку додатково встановлюють давач кута відхилення маятникової підвіски від вертикалі ДК. ;
;  ;
; ,
, – швидкість маси
– швидкість маси  – ку-това швидкість маси
– ку-това швидкість маси  – довжина маятникової підвіски;
– довжина маятникової підвіски;  – прискорення вільного падіння;
– прискорення вільного падіння;  – сила, яка діє на ві-зок;
– сила, яка діє на ві-зок;  – радіус приведення передачі,
– радіус приведення передачі,  – ККД передачі.
– ККД передачі. ;
; . (14.14)
. (14.14) , одержимо
, одержимо . (14.15)
. (14.15) буде пропорційною вихідній напрузі регулятора.
буде пропорційною вихідній напрузі регулятора. . Оскільки
. Оскільки  можуть мати додатні й від’ємні значення, то їх представимо по п’ять термів кожну (NB, NM, Z, PM, PB), a вихідну змінну
можуть мати додатні й від’ємні значення, то їх представимо по п’ять термів кожну (NB, NM, Z, PM, PB), a вихідну змінну 
 , користуючись правилами фаззі-логіки: якщо
, користуючись правилами фаззі-логіки: якщо  і
і  , то
, то  ; якщо
; якщо  і
і  , то
, то  і т. д.;
і т. д.; : якщо
: якщо  ,то
,то  і т. д. Останні клітинки таблиці для
і т. д. Останні клітинки таблиці для  і
і  заповнюють за результатами об’єднання відповід-них термів:
заповнюють за результатами об’єднання відповід-них термів: ;
;  і т. д.
і т. д.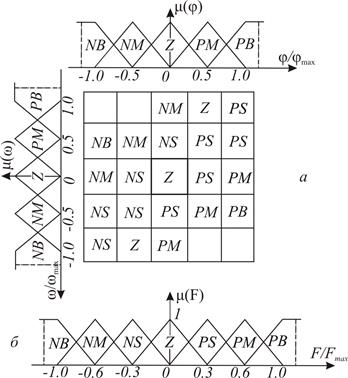
 , тоді
, тоді  . Для
. Для 

 , а
, а  .
. , (14.16)
, (14.16)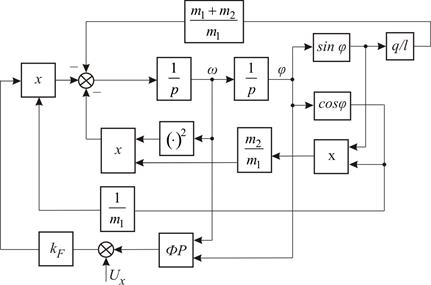
 – потужність двигуна;
– потужність двигуна;  – номіна-льна швидкість двигуна;
– номіна-льна швидкість двигуна;  – ККД редуктора;
– ККД редуктора;  – коефіцієнт передачі редуктора;
– коефіцієнт передачі редуктора;  – радіус коліс візка. Мож-ливий діапазон сили
– радіус коліс візка. Мож-ливий діапазон сили  .
.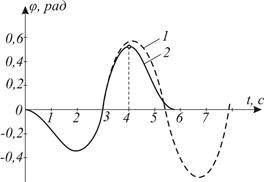
 На підставі наведених на рис. 14,9 таблиці і функцій належності складають програму ро-боти ФР. Перевірку складеного алгоритму виконують шляхом мо-делювання системи фаз-зі-керування, представи-вши об’єкт керування рівнянням (14.15). Резу-льтати моделювання при подачі на вхід мо-делі сигналу
На підставі наведених на рис. 14,9 таблиці і функцій належності складають програму ро-боти ФР. Перевірку складеного алгоритму виконують шляхом мо-делювання системи фаз-зі-керування, представи-вши об’єкт керування рівнянням (14.15). Резу-льтати моделювання при подачі на вхід мо-делі сигналу  у виді прямокутного імпульсу для
у виді прямокутного імпульсу для  кг,
кг, 
 кг і
кг і 
 , який формує задаючий при-стрій, і кутом повороту вала РО
, який формує задаючий при-стрій, і кутом повороту вала РО  :
: . (15.1)
. (15.1)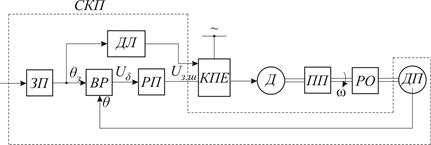
 , який створює СКП.
, який створює СКП. , регулятора переміщення РП і давача положення ДП. Для зменшення динамічних похибок можуть використовуватись диференціальні ланки ДЛ, які будуть формувати на КПЕ впливи, пропорційні похідним
, регулятора переміщення РП і давача положення ДП. Для зменшення динамічних похибок можуть використовуватись диференціальні ланки ДЛ, які будуть формувати на КПЕ впливи, пропорційні похідним  і
і  . Зворотний зв'язок за переміщенням і диференціальні ланки створюють комбіновану сис-тему керування: систему керування за відхиленням і збуренням, яка забезпечує високу швидкодію і малу похибку.
. Зворотний зв'язок за переміщенням і диференціальні ланки створюють комбіновану сис-тему керування: систему керування за відхиленням і збуренням, яка забезпечує високу швидкодію і малу похибку. і
і  .
. . При подальшому збільшен-ні
. При подальшому збільшен-ні  кутова швидкість двигуна і прискорення не змінюються, бо вони визначаються параметрами самого електропривода. При
кутова швидкість двигуна і прискорення не змінюються, бо вони визначаються параметрами самого електропривода. При  двигун зупиняється. За такого керування система керува-ння проста, але точність не висока. Тому її використовують тоді, коли не потрібна висока точність та швидкодія.
двигун зупиняється. За такого керування система керува-ння проста, але точність не висока. Тому її використовують тоді, коли не потрібна висока точність та швидкодія.