
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Технічна реалізація системи з підпорядкованимСодержание книги
Поиск на нашем сайте Регулюванням
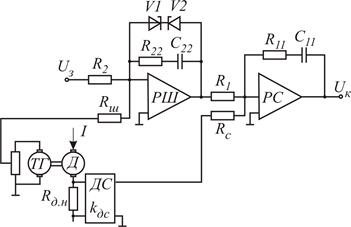
Регулятори струму і швидкості в системі з підпорядкованим регулюванням реалізують на базі операційних підсилювачів (рис.10.3). Параметри силової частини електропривода (керованого випрям-ляча, двигуна і тахогенератора) будемо вважати відомим, бо вони розглядувались раніше. Тому необхідно на підставі передавальних функцій регуляторів розрахувати опори і ємності згідно рис.10.3.
Рис.10.3. Схеми регуляторів швидкості і струму
Згідно (10.6) для регулятора струму маємо:
Коефіцієнт зворотного зв’язку за струмом визначають із умови роботи привода у стопорному режимі (рис.10.2), для якого
де За відомого
Опір резистора в колі зворотного зв’язку за струмом визначають з рівняння
У випадку П-регулятора швидкості
В (10.18) два невідомі. Тому приймають, наприклад,
Оскільки У випадку ПІ-регулятор швидкості згідно (10.14)
Прийнявши
Обмеження струму в системі підпорядкованого Регулювання
Якщо на вхід ПІ-регулятора подати стрибкоподібний сигнал Величину напруги стабілізації
де Окрім обмеження струму якоря в динамічних процесах шляхом обмеження напруги на виході регулятора швидкості, часто викорис-товують задавач інтенсивності (рис.10.1), за допомогою якого сиг-нал задання швидкості змінюється не стрибком, а лінійно в часі до необхідного значення.
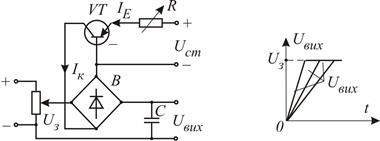
Рис.10.4. Принципова схема задавача інтенсивності (а) і його часові характеристики (б)
Задавач інтенсивності (ЗІ) складається з випрямляча В, транзис-тора VT і конденсатора С (рис.10.4,а). Задаюча напруга
Коли при усталеному русі електропривода різко зміниться мо-мент сил опору (ударне навантаження), то струм якоря може пере-вищити допустиме значення. Тому при використанні задавача інтен-сивності обов’язковим є обмеження напруги на виході регулятора швидкості. Для перевірки правильності розрахунків проводять моделювання роботи системи в динамічних режимах методом, який описаний в розділі 9.3, з врахуванням способів обмеження струму. Окрім того, для отримання результатів, близьких до реальних, слід моделювати керований випрямляч як ланку з обмеженням ЕРС номінальним значенням.
Контрольні запитання
1. Яка умова вибору регулятора струму в системі підпорядкова-ного регулювання швидкості двигуна? 2. З якої умови визначають передавальну функцію регулятора струму в системі підпорядкованого регулювання? 3. Яка умова вибору регулятора швидкості в системі підпоряд-кованого регулювання? 4. За якої умови система підпорядкованого регулювання з П-ре-гулятором швидкості може забезпечити задану точність регулюван-ня в усталеному режимі? 5. На базі яких пристроїв реалізують регулятори струму і швид-кості в системах підпорядкованого регулювання? 6. З якої умови визначають коефіцієнт зворотного зв’язку за струмом? 7. З якої умови визначають коефіцієнт зворотного зв’язку за швидкістю? 8. Як здійснюється обмеження струму в системі підпорядковано-го регулювання? 9. З якою метою використовують задавач інтенсивності в системі підпорядкованого регулювання? 10. Чи буде обмежуватись струм при різкій зміні навантаження в системі автоматичного регулювання з здавачем інтенсивності? Розділ 11
Системи керування швидкістю Асинхронного електропривода
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 385; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.006 с.) |

 і
і  . (10.16)
. (10.16) або
або  , (10.17)
, (10.17) – максимальна напруга на вході регулятора стру-му. Коефіцієнт
– максимальна напруга на вході регулятора стру-му. Коефіцієнт  . Якщо
. Якщо  згідно (10.17) більше
згідно (10.17) більше  , то необхідно використати давач струму з коефіцієнтом передачі
, то необхідно використати давач струму з коефіцієнтом передачі  .
. ,
,  і
і  . Тому, зазвичай, приймають
. Тому, зазвичай, приймають  . Тоді
. Тоді і
і  .
. або
або  .
. і згідно (10.10)
і згідно (10.10) . (10.18)
. (10.18)
 . Тоді опір резистора в колі зворотного зв’язку за швид-кістю визначають із рівняння
. Тоді опір резистора в колі зворотного зв’язку за швид-кістю визначають із рівняння . (10.19)
. (10.19) , то
, то  .
. і
і  . (10.20)
. (10.20) ,
,  . Тоді
. Тоді  і згідно (10.19)
і згідно (10.19)  , то швидкість досягне усталеного значення
, то швидкість досягне усталеного значення 
 за час
за час  з перерегулюванням
з перерегулюванням  , Але струм перевищить допустиме значення
, Але струм перевищить допустиме значення  . Тому необхідно передбачити обмеження струму в перехідних процесах, що досягає-ться обмеженням напруги на виході регулятора швидкості стабіліт-ронами
. Тому необхідно передбачити обмеження струму в перехідних процесах, що досягає-ться обмеженням напруги на виході регулятора швидкості стабіліт-ронами  і
і  (рис.10.3).
(рис.10.3). визначають з рівняння
визначають з рівняння , (10.21)
, (10.21) – стопорний струм (рис.10.2).
– стопорний струм (рис.10.2). , через випрямляч В подається в коло колектора VT, який увімкнено за схемою зі спільною базою. Емітерне коло живиться від джерела стабілізованої напруги
, через випрямляч В подається в коло колектора VT, який увімкнено за схемою зі спільною базою. Емітерне коло живиться від джерела стабілізованої напруги  практично не залежить від напруги на колекто-рі. Тому при вмиканні напруги
практично не залежить від напруги на колекто-рі. Тому при вмиканні напруги  . При зміні полярності
. При зміні полярності 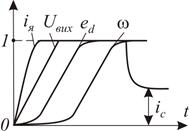 Змінюючи струм емітатора
Змінюючи струм емітатора  резистором
резистором  , можна змінювати інтенсивність наростання вихідної напруги (рис.10.4,б) і тим самим за-давати необхідне прискорення елек-троприводу в процесах пуску і галь-мування.
, можна змінювати інтенсивність наростання вихідної напруги (рис.10.4,б) і тим самим за-давати необхідне прискорення елек-троприводу в процесах пуску і галь-мування. З кривих, наведених на рис.10,5 у відносних одиницях, видно, що при лінійній зміні напруги на виході ЗІ ЕРС керованого випрямляча
З кривих, наведених на рис.10,5 у відносних одиницях, видно, що при лінійній зміні напруги на виході ЗІ ЕРС керованого випрямляча  і швидкість двигуна
і швидкість двигуна  змінюються за законами, близькими до лінійних. При цьому струм якоря
змінюються за законами, близькими до лінійних. При цьому струм якоря  спочатку швидко наростає до заданого значення, після залишається сталим і при швидкості, близькій до усталеної, спадає до
спочатку швидко наростає до заданого значення, після залишається сталим і при швидкості, близькій до усталеної, спадає до  , де
, де  – момент навантаження.
– момент навантаження.


