
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механічні характеристики асинхронних двигунівСодержание книги
Поиск на нашем сайте
Асинхронні двигуни дуже широко використовуються у промис-ловості завдяки таким перевагам як простота конструкції, надій-ність в експлуатації, дешевизна, менша вага у порівнянні з двигуна-ми постійного струму. У діапазоні потужностей до Успіхи в галузі силових напівпровідникових приладів призвели до того, що частка регульованих асинхронних приводів постійно зростає. Так, уже у 2002 році в Європі продаж асинхронних регульо-ваних приводів склав 68%, приводів постійного струму – 15% і ме-ханічних та гідравлічних приводів – 17%. Широке використання регульованого електропривода зумовлене тим, що електропривод виконує не тільки функцію перетворення електричної енергії у меха-нічну, але і є засобом керування технологічним процесом, оскільки задачі реалізації необхідної якості протікання технологічних проце-сів у багатьох випадках покладаються на системи керування регу-льованими електроприводами у поєднанні з засобами технологічної автоматики. Способи регулювання швидкості асинхронних двигунів, як і дви-гунів постійного струму, визначають за рівнянням механічної харак-теристики. Її отримують на підставі спрощеної схеми заміщення (рис.5.1).
Рис.5.1. Спрощена схема заміщення асинхронного двигуна На схемі: Момент асинхронного двигуна визначають з виразу втрат потуж-ності: втрати електромагнітної потужності дорівнюють електрич-ним втратам в колі ротора, тобто
Приведений струм згідно схеми заміщення
Підставивши значення
З (5.3) витікає, що регулювати швидкість асинхронних двигунів можна зміною: Ø напруги живлення Ø числа пар полюсів Ø частоти напруги живлення Ø додатковим опором в колі обмотки ротора двигуна з фазним ротором. Аналіз залежності (5.3) показує, що вона має два максимуми: один – в режимі двигуна, другий – у генераторному режимі. Прирівнявши
де
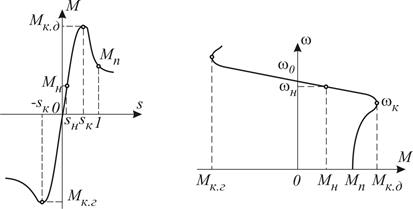
Рис.5.2. Механічні характеристики асинхронного двигуна
Залежність Характерні точки механічних характеристик: Ø Ø Ø Ø У випадку Якщо в (5.4) знехтувати активним опором обмотки статора
яке справедливе для значень
Цією залежністю користуються у практичних розрахунках.
Наближена механічна характеристика таких двигунів наведена на рис.5.3. Там же пунктиром показана залежність Їх особливістю є збільшений пусковий момент, менший пуско-вий струм, але при великому ковзанні виникає провал у механічній характеристиці Двигуни зі спеціальними пазами мають такі співвідношення:
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 754; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.007 с.) |

 їх ви-робляють у 40-50 разів більше, ніж двигунів постійного струму.
їх ви-робляють у 40-50 разів більше, ніж двигунів постійного струму.
 – фазна напруга мережі;
– фазна напруга мережі;  – фазний струм стато-ра;
– фазний струм стато-ра;  – приведений струм ротора;
– приведений струм ротора;  і
і  – активний і реактивний опори обмотки статора;
– активний і реактивний опори обмотки статора;  і
і  – приведені активний і реактивний опори обмотки ротора;
– приведені активний і реактивний опори обмотки ротора;  і
і  – активний і реактивний опори кон-туру намагнічування;
– активний і реактивний опори кон-туру намагнічування;  – ковзання;
– ковзання;  – швидкість обертання магнітного кола статора;
– швидкість обертання магнітного кола статора;  – число пар полю-сів;
– число пар полю-сів;  – частота напруги мережі живлення.
– частота напруги мережі живлення. . Звідси
. Звідси . (5.1)
. (5.1) . (5.2)
. (5.2) у /5.1/, одержимо
у /5.1/, одержимо . (5.3)
. (5.3) ;
; , визначають параметри максимумів, які називають критичними: критичне ковзання
, визначають параметри максимумів, які називають критичними: критичне ковзання  і критичні моме-нти
і критичні моме-нти  і
і  . За цих параметрів (5.3) зводиться до такого виду:
. За цих параметрів (5.3) зводиться до такого виду: , (5.4)
, (5.4) ;
;  . У цьому рівнянні знак „+” відноситься до рушійного режиму роботи двигуна, знак „-” – до генераторного режиму роботи паралельно з мережею, з якої він споживає струм, що створює основний магнітний потік.
. У цьому рівнянні знак „+” відноситься до рушійного режиму роботи двигуна, знак „-” – до генераторного режиму роботи паралельно з мережею, з якої він споживає струм, що створює основний магнітний потік. , побудована за рівнянням (5.4), має два максимуми (рис.5.2,а). Характеристика
, побудована за рівнянням (5.4), має два максимуми (рис.5.2,а). Характеристика  (рис.5.2,б) пере-рахована за характеристикою
(рис.5.2,б) пере-рахована за характеристикою 
 .
. ;
;  , швидкість двигуна дорівнює синхронній швид-кості
, швидкість двигуна дорівнює синхронній швид-кості  (швидкості обертання магнітного поля статора);
(швидкості обертання магнітного поля статора); ;
;  , що відповідає номінальній швидкості
, що відповідає номінальній швидкості  і номінальному моменту
і номінальному моменту  ;
; ;
;  і
і  – максимальні моменти у ру-шійному та генераторному режимах і критична швидкість
– максимальні моменти у ру-шійному та генераторному режимах і критична швидкість  ;
; ;
;  – пусковий момент.
– пусковий момент. двигун працює в режимі гальмування противми-канням.
двигун працює в режимі гальмування противми-канням. , то отримаємо рівняння механічної характеристики у виді
, то отримаємо рівняння механічної характеристики у виді , (5.5)
, (5.5) . За
. За  виникає велика по-хибка і користуватись (5.5) для побудови характеристики
виникає велика по-хибка і користуватись (5.5) для побудови характеристики  не можна. Але підстановкою в (5.5)
не можна. Але підстановкою в (5.5)  отри-маємо просту залежність для визначення критичного ковзання:
отри-маємо просту залежність для визначення критичного ковзання: . (5.6)
. (5.6)
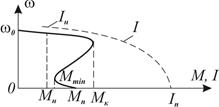 Механічні характеристики, наведені на рис.5.2, характерні для асинхронних двигунів, ротори яких мають круглі пази. Їх недолік – малий пусковий момент. Для збільшення пускового моменту пази роблять вузькими і високими, а також подвійно-круглими.
Механічні характеристики, наведені на рис.5.2, характерні для асинхронних двигунів, ротори яких мають круглі пази. Їх недолік – малий пусковий момент. Для збільшення пускового моменту пази роблять вузькими і високими, а також подвійно-круглими. .
. із-за явища витіснення струму на по-верхню товстого провідника, який знаходиться у сильному магніт-ному полі. Це еквівалентно збільшенню його активного опору.
із-за явища витіснення струму на по-верхню товстого провідника, який знаходиться у сильному магніт-ному полі. Це еквівалентно збільшенню його активного опору. ;
;  ;
;  ;
;  . При цьому більшу кратність пускового струму мають більш потужні двигуни.
. При цьому більшу кратність пускового струму мають більш потужні двигуни.


