
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Системы навигации по рельефу местностиСодержание книги
Поиск на нашем сайте Принцип действия систем навигации по рельефу местности основан на том, что каждому участку суши соответствует свой, неповторимый характер изменения высот отдельных элементов этого участка. На рис. 3.4 показан профиль некоторого участка местности, над которым летит ЛА. Высота полета ЛА может быть определена барометрическим высотомером (
Рис. 3.4. Профиль некоторого участка местности, над которым летит ЛА
В рассматриваемых системах профиль участка местности характеризуют разностью Кроме того, производится квантование пропорциональное высоте полета выходного сигнала РВ по уровню. С учетом сказанного текущая карта местности (профиль рельефа) представляет собой одномерную карту (см. рис. 3.4), имеющую вид одной строки матрицы эталонной карты местности. Поперечный размер Zк эталонной карты зависит от возможного значения бокового отклонения ЛА от заданной траектории из-за погрешностей системы счисления за время от предыдущей коррекции. Ширина строки этой матрицы (а, следовательно, и число строк) определяется поперечным размером упомянутой разрешаемой площадки. При рассмотренном способе записи эталонной карты требуется большой объем памяти для хранения дискретного по времени и квантованного на n уровней эталонного изображения и большой объем вычислений, возрастающий с увеличением числа уровней квантования. Радикального снижения требований к объему памяти и количеству вычислительных операций достигают, применяя бинарное квантование (n=2) сигнала h(x). При этом несколько снижается точность местоопределения. Для получения бинарно-квантованного изображения сначала формируют сигнал
Рис. 3.5. Получение бинарно-квантованного изображения
Структурная схема системы навигации по рельефу местности (системы сравнения вертикальных контуров местности) представлена на рис. 3.6. Приведенные к одному масштабу сигналы с выходов барометрического высотомера (БВ) и РВ поступают на вычитающее устройство, которое формирует сигнал h(x), несущий информацию о рельефе местности. Этот сигнал подается на ЦВМ ОСС, программное обеспечение которой производит формирование карты местности (ФКМ), вырабатывает соответствующую эталонную карту (ДЭК) той же местности и осуществляет корреляционную обработку сформированных карт (Кор).
. Рис. 3.6. Структурная схема системы навигации по рельефу местности
Корректирующие сигналы УС-3 для инерциальной системы счисления ИНС вырабатывает навигационная ЦВМ (НЦВМ). Эта же НЦВМ управляет датчиком эталонной карты (УС-1), выбирая соответствующую участку коррекции эталонную карту. Кроме того, НЦВМ вырабатывает сигналы УС-2, необходимые для ФКМ. На НЦВМ может также, в случае необходимости, подаваться внешняя информация (Вн. И.) от бортовых навигационных устройств ЛА. Сигналы на систему автоматического управления САУ ЛА могут сниматься либо с ИНС, либо с НЦВМ. При корреляционной обработке сигналов, соответствующих текущей и эталонной картам, производится поэлементное сравнение карт, в результате которого выбирается соответствующая строка эталонной карты (например, вторая строка на рис. 3.4) и определяется смещение карт по оси X. Мерой совпадения "оцифрованных" изображений служит коэффициент корреляции или эквивалентная ему функция. Соответствующие алгоритмы сравнения - корреляционные выбирают исходя из минимума боковых лепестков ВКФ и требуемых для вычисления этой функции операций. Одна из групп простых цифровых корреляционных алгоритмов основана на использовании парных функций Самым простым из этой группы корреляционных алгоритмов является алгоритм суммирования парных функций, при котором вычисляется аналог коэффициента корреляции
где n - число уровней квантования; N - число ячеек карты. Находят применение и более сложные алгоритмы, например, алгоритм перемножения парных функцией:
где функция При бинарном квантовании (п =2) возможны четыре типа парных функций, которые составляют матрицу
где в целях упрощения записи принято Тогда алгоритмы (3.1) и (3.2) принимают вид
где Поясним сказанное на примере сравнения бинарно квантованных эталонного
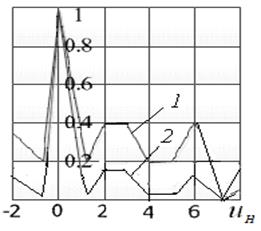
Рис. 3.7. Закон изменения коэффициентов ρ с(uн) - (1) и ρ п(uн) - (2) от сдвига сравниваемых изображений
Закон изменения коэффициентов Таким образом, точность системы навигации по рельефу местности зависит от размера ячейки карт местности. Расчеты показывают, что значение погрешности определения местоположения составляет 0,6 размера соответствующей стороны ячейки. Наилучшие результаты по точности в такой системе, как и следовало ожидать, достигаются на малых высотах полета.
|
||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 1125; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.007 с.) |

 ) или РВ (
) или РВ ( ). При этом высота
). При этом высота 
 . Для работы ОСС выбирается контрастный по рельефу участок местности, протяженность Хк которого определяется значением возможного отклонения ЛА вдоль траектории полета при навигации по рельефу местности. Для получения цифровой карты местности производится дискретизация участка протяженностью Хк, которая определяется допустимым продольным отклонением ЛА, на ячейки с размером
. Для работы ОСС выбирается контрастный по рельефу участок местности, протяженность Хк которого определяется значением возможного отклонения ЛА вдоль траектории полета при навигации по рельефу местности. Для получения цифровой карты местности производится дискретизация участка протяженностью Хк, которая определяется допустимым продольным отклонением ЛА, на ячейки с размером  , где V - скорость полета, a
, где V - скорость полета, a  - интервал дискретизации по времени. Значение
- интервал дискретизации по времени. Значение  определяется разрешающей способностью РВ по дальности, т.е. размером разрешаемой площадки [1]. При современных методах обработки сигналов эта площадка может быть существенно меньше той, которая соответствует сечению ДНА РВ на земной поверхности.
определяется разрешающей способностью РВ по дальности, т.е. размером разрешаемой площадки [1]. При современных методах обработки сигналов эта площадка может быть существенно меньше той, которая соответствует сечению ДНА РВ на земной поверхности. , соответствующий среднему уровню (наклону) местности (рис. 3.5,а), а затем определяется отклонение
, соответствующий среднему уровню (наклону) местности (рис. 3.5,а), а затем определяется отклонение  высот рельефа от этого среднего уровня. Сигнал
высот рельефа от этого среднего уровня. Сигнал  .
.

 , представляющих собой число пар элементов (ячеек) с уровнями квантования i и j, совпадающих при данном сдвиге карт на
, представляющих собой число пар элементов (ячеек) с уровнями квантования i и j, совпадающих при данном сдвиге карт на  .
. (3.1)
(3.1) (3.2)
(3.2) есть число ячеек эталонного изображения с уровнем квантования, равным i.
есть число ячеек эталонного изображения с уровнем квантования, равным i.
 .
. (3.3)
(3.3) , (3.4)
, (3.4) и
и  - число ячеек, содержащих 0 и 1 соответственно;
- число ячеек, содержащих 0 и 1 соответственно;  .
. и текущего
и текущего  изображений, сдвинутых на
изображений, сдвинутых на  (рис. 3,7, а и б). При указанном сдвиге изображений все парные функции, как следует из рис. 3.7, имеют значения, равные 2, и коэффициенты
(рис. 3,7, а и б). При указанном сдвиге изображений все парные функции, как следует из рис. 3.7, имеют значения, равные 2, и коэффициенты  и
и  соответственно равны
соответственно равны  и
и  . Сдвигая эталонное изображение на один дискрет влево, получим F00(1)= F11(1)= - 1; F01(1) =4 и F10(0)=3. Значения коэффициентов
. Сдвигая эталонное изображение на один дискрет влево, получим F00(1)= F11(1)= - 1; F01(1) =4 и F10(0)=3. Значения коэффициентов  и
и  , а
, а  . При следующем сдвиге эталонного изображения на один дискрет функции F00(0) и F11(0) принимают значения, равные 5, а функции F01(0) и F10(0) равны нулю. Коэффициенты
. При следующем сдвиге эталонного изображения на один дискрет функции F00(0) и F11(0) принимают значения, равные 5, а функции F01(0) и F10(0) равны нулю. Коэффициенты  и
и  принимают максимальное значение, равное единице. Дальнейший сдвиг изображений приведет к уменьшению
принимают максимальное значение, равное единице. Дальнейший сдвиг изображений приведет к уменьшению 
 и
и  от сдвига сравниваемых изображений (аналог корреляционной функции) показан на рис. 3.7. Видно, что ширина главного пика этих функций зависит от величины дискрета
от сдвига сравниваемых изображений (аналог корреляционной функции) показан на рис. 3.7. Видно, что ширина главного пика этих функций зависит от величины дискрета  имеют меньший уровень, чем при использовании алгоритма (3.3). Уровень боковых "лепестков" можно дополнительно снизить, усложняя корреляционный алгоритм.
имеют меньший уровень, чем при использовании алгоритма (3.3). Уровень боковых "лепестков" можно дополнительно снизить, усложняя корреляционный алгоритм.


