
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Анализ ошибок измерения высоты в радиовысотомерах с ЧМСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте 1.3.1. Характеристика основных источников ошибок Поскольку бортовые радиовысотомеры используют сигнал, отраженный от протяженной статистически неровной поверхности, то в результате возникают специфические ошибки в измерении высоты. Их можно разделить на три составляющие: ошибки, вызванные смещением средней оценки измеряемой высоты (смещение оценки), флуктуационные и динамические ошибки [4]. Смещение оценки. Существует две причины возникновения этой ошибки. Первая состоит в том, что отраженный сигнал формируется от большого участка поверхности и в нем заложена информация не только о высоте полета H, но и о различных наклонных дальностях в пределах облучаемой зоны. Смещение оценки H при этом зависит от статистических свойств отражающей поверхности, ДНА, параметров зондирующего сигнала и способов обработки принятого сигнала. Различают локальный и интегральный способы обработки отраженного сигнала. В первом случае обрабатывается часть отраженного сигнала, приходящая от участков поверхности в окрестности нормали H (левый склон огибающей спектра сигнала биений), во втором – определяется центр тяжести огибающей спектра биений. Измеренное тем или иным способом значение времени запаздывания будет смещено относительно истинного Вторая причина возникновения смещения оценки H вызвана эволюциями ЛА по крену и тангажу. Отклонение оси ДНА от вертикали на угол Распределение ошибок, вызванных смещением средней оценки, может иметь произвольную форму, поэтому при проектировании задают их максимально возможную и среднюю величину. Флуктуационные ошибки. Уровень флуктуационных ошибок определяется параметрами зондирующего сигнала, соотношением сигнал/шум, параметрами аппаратуры и шириной спектра флуктуаций входного сигнала. Ширина спектра флуктуаций зависит от статистических свойств поверхности, ДНА, скорости движения ЛА и параметров зондирующего сигнала. Смещение средней оценки и флуктуационные ошибки можно характеризовать общим нестационарным законом распределения с переменной дисперсией и переменным средним значением. Исходя из такого представления, при проектировании РВ полную ошибку задают на некотором интервале от Динамические ошибки. Причина их возникновения заключается в инерционности измерителя по отношению к изменениям измеряемого параметра и в смещении частоты биений
1.3.2. Систематические погрешности 1. Систематическая погрешность возникает из-за конечной ширины и асимметрии спектра преобразованного сигнала в реальных условиях работы РВ. Реальный спектр преобразованного сигнала расширяется и включает частотные составляющие в диапазоне от
Относительная ширина спектра преобразованного сигнала при нормальном облучении
и зависит от ширины ДНА РВ. При Распределение энергии в спектре преобразованного сигнала определяется формой ДНА. Действительно, сигналы, отраженные от площадки, расположенной непосредственно под ЛА (
Рис. 1.10. Влияние ДОР поверхности на форму спектра преобразованного сигнала в ЧМ РВ
Составляющая спектра преобразованного сигнала с минимальной частотой Результирующая относительная ошибка из-за неопределенности ДОР поверхности и возможного угла крена (тангажа) ЛА определяется выражением
Из равенства слагаемых в формуле (1.42) можно получить соотношения для выбора ширины ДНА при заданных углах крена (тангажа) или, наоборот, допуск на стабилизацию оси ДНА
При этом полагают, что Другой подход к расчету погрешности, вызванной смещением средней оценки, основан на аппроксимации формы спектральной плотности сигнала биений
где Тогда средняя частота спектра
Следовательно, относительная ошибка отклонения
При Определение значения средней частоты спектра При использовании для измерения частоты биений счетчиков необходимо учитывать, что число пересечений преобразованным сигналом нулевой оси в единицу времени в одном направлении (вверх или вниз) определяется не средней частотой спектра, а так называемой среднеквадратической частотой
Определим
Откуда следует
где Таким образом, значение Необходимо отметить, что относительные рассогласования 2. Систематическая погрешность в ЧМ РВ возможна также из-за несовпадения характерных частот спектра сигнала и шума. Для существенного уменьшения этой погрешности требуется превышение полезного сигнала над шумом на несколько десятков децибел. Рассмотрим этот вопрос подробнее. На выходе усилителя разностного сигнала (сигнала биений) в качестве измерителя частоты применяют либо счетчик числа пересечений преобразованным сигналом нулевого уровня, которое совпадает со значением среднеквадратичной частоты спектра биений В неследящих ЧМ РВ из соображений простоты и надежности предпочтение отдается приемнику с нулевой промежуточной частотой, в котором преобразованный сигнал усиливается непосредственно в усилителе сигнала биений, и счетному методу измерения частоты. Полоса пропускания усилителя сигнала биений в несколько раз шире спектра преобразованного сигнала и определяется ожидаемым диапазоном разностных частот. Оценим необходимое отношение сигнал/шум для получения малых ошибок измерения высоты неследящим ЧМ РВ. Расчет проведем для конкретной формы амплитудно-частотной характеристики усилителя разностной частоты (УРЧ) радиовысотомера РВ-4. Для получения одинаковой интенсивности отраженных сигналов в диапазоне высот от
где Среднее значение частоты шума равно
Поскольку для характеристики УРЧ РВ-4
Значение средней частоты спектра сигнала биений Зависимость
Рис. 1.11. Зависимость средней частоты смеси сигнала с шумом при В отсутствие шумов выходной измеритель определяет среднюю частоту сигнала. При наличии шумов показания частотомера, измеряющего
При
Следовательно, необходимое отношении сигнал/шум для обеспечения заданного значения погрешности
Учитывая, что относительная ширина спектра преобразованного сигнала в РВ тогда требуемое q равно
На рис. 1.12 построена зависимость Рассмотрение графиков рис. 1.12 показывает, что для получения относительной погрешности отсчета средней частоты сигнала биений
Рис. 1.12. Зависимость отношения сигнал/шум от частоты сигнала биений и требуемой погрешности
Необходимое отношение сигнал/шум может быть заметно снижено при переходе к построению схемы радиовысотомера по принципу следящего измерителя. Отношение сигнал/шум на выходе узкополосного фильтра существенно больше отношения сигнал/шум на входе широкополосного УРЧ неследящего измерителя. Энергетический выигрыш равен отношению полос пропускания
В режиме сопровождения средняя частота сигнала и шума практически совпадает с частотой настройки узкополосного фильтра Узкополосные РВ следящего типа. В настоящее время в качестве прецизионных измерителей высоты широко используют узкополосные РВ, в которых полосу пропускания тракта обработки преобразованного сигнала выбирают близкой к ширине спектра преобразованного сигнала
Рис 1.13. Схема узкополосного высотомера с подстройкой периода модуляции ЧМ сигнала По сравнению с основной схемой неследящего ЧМ высотомера здесь имеются изменения: усилитель приемника выполнен узкополосным, модулятор передатчика перестраивается схемой управления, которой предшествует усилитель следящей системы. Его вход подключен к частотному детектору. Следящая система в заданном диапазоне высот H поддерживает такое значение периода модуляции, при котором дальномерная частота
Поэтому сигнал управления модулятором, определяющий Режим измерения реализуется в тракте, состоящем из управляющего генератора (УГ), модулятора (М), частотно-модулированного генератора (ЧМГ) направленного ответвителя (НО), передающей и приемной антенн, балансного смесителя (БС), узкополосного фильтра - усилителя сигнала биений (УСБ), усилителя-ограничителя (УО), частотного дискриминатора (ЧД) и схемы управления частотой модулирующих колебаний (СУ). Измерительный тракт РВ представляет собой замкнутую следящую систему, чувствительным элементом которой является ЧД с постоянной частотой настройки Рассмотренная схема проста и обладает малыми аппаратурными погрешностями, т.к. информация о высоте заключена в частоте сигнала биений, и нестабильности амплитудных и фазовых характеристик тракта не влияют на показания РВ. Однако при работе РВ над шероховатыми поверхностями такие системы дают существенные ошибки из-за смещения оценки измеряемой высоты в зависимости от типа поверхности и эволюции ЛА. Возросшие требования к точности измерения высоты привели к нахождению других способов обработки отраженного сигнала – локальных, т.е. к обработке лишь части сигнала, отраженного от нормали к поверхности. Информация о высоте извлекается по положению максимума и левого склона (фронта) огибающей спектра. Реализация этих (локальных) способов осуществляется при помощи следящих измерителей типа ЧАП с частотными дискриминаторами специального вида. К недостаткам следящих измерителей следует отнести неустойчивость их работы из-за возможного срыва сопровождения при быстрых измерениях высоты и при пропаданиях отраженного сигнала на время, большее, чем время памяти следящей системы. Неследящие же измерители всегда устойчивы в работе, поскольку являются системами разомкнутого типа.
1.3.3. Флуктуационные погрешности 1. Ошибки, определяемые собственными флуктуациями отраженного сигнала, зависят от ширины спектра. При достаточно большом превышении полезного сигнала над шумами среднеквадратичная погрешность измерения частоты Найдем среднеквадратичную относительную ошибку в измерении высоты ЛА, вызванную собственными флуктуациями сигнала биений:
Положим, что
2. Погрешность, обусловленная шумами, зависит от отношения мощностей сигнала и шума на входе приемника в пределах полосы пропускания последнего
Уменьшения флуктуационной погрешности можно достигнуть сужением полосы пропускания каскадов, предшествующих измерителю, и увеличением времени усреднения T до разумных пределов (0,1 … 1 с), определяемых допустимой динамической погрешностью. Качественный характер зависимости флуктуационной погрешности РВ от отношения сигнал/шум показан на рис. 1.14.
Рис. 1.14. Зависимость флуктуационной погрешности
1.3.4. Динамическая ошибка Расчет составляющей динамической ошибки, связанной с инерционностью применяемого в РВ измерителя, по отношению к изменениям измеряемого параметра аналогичен динамическим ошибкам других измерителей, рассмотренных, например, в [2]. Составляющая динамической ошибки, обусловленной эффектом Доплера:
Например, для режима автоматической посадки самолета, снижающегося до высоты порядка 30 м со скоростью 3 м/с при
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 1527; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.103 (0.011 с.) |

 . Если бы на борту ЛА имелась информация об облучаемой поверхности, то указанные отклонения в среднем можно было бы скомпенсировать. Над неоднородной местностью средние значения отмеченных задержек становятся случайными и их невозможно учесть и скорректировать.
. Если бы на борту ЛА имелась информация об облучаемой поверхности, то указанные отклонения в среднем можно было бы скомпенсировать. Над неоднородной местностью средние значения отмеченных задержек становятся случайными и их невозможно учесть и скорректировать. приводит к изменению измеренной задержки отраженного сигнала, поэтому показания РВ будут соответствовать наклонной дальности вместо истинной высоты H.
приводит к изменению измеренной задержки отраженного сигнала, поэтому показания РВ будут соответствовать наклонной дальности вместо истинной высоты H. до
до  с определенной вероятностью.
с определенной вероятностью. на частоту Доплера
на частоту Доплера  .
. , определяемой высотой полета ЛА, до частоты, соответствующей максимальному значению наклонной дальности
, определяемой высотой полета ЛА, до частоты, соответствующей максимальному значению наклонной дальности  . Приближенно (без учета ДОР поверхности) ширину спектра
. Приближенно (без учета ДОР поверхности) ширину спектра  можно определить
можно определить

 значение
значение  .
. ), имеют наибольшую интенсивность, а интенсивность сигналов, отраженных от кольцевых площадок, соответствующих
), имеют наибольшую интенсивность, а интенсивность сигналов, отраженных от кольцевых площадок, соответствующих  , уменьшается. Огибающая спектра сигнала биений становится несимметричной (см. рис. 1.9). На огибающей спектра сигнала биений сказывается также ДОР поверхности, т.е. характер отражающей поверхности, формирование спектра преобразованного сигнала в ЧМ РВ показано на рис. 1.10.
, уменьшается. Огибающая спектра сигнала биений становится несимметричной (см. рис. 1.9). На огибающей спектра сигнала биений сказывается также ДОР поверхности, т.е. характер отражающей поверхности, формирование спектра преобразованного сигнала в ЧМ РВ показано на рис. 1.10.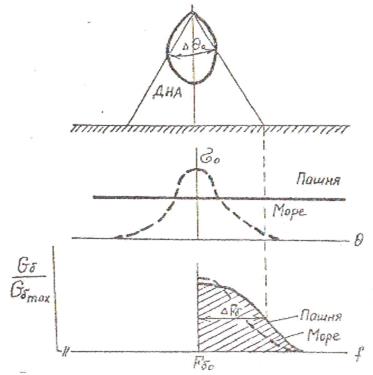
 .
.
 ;
; 
 , т.е. ширина ДОР
, т.е. ширина ДОР  .
. треугольником с основанием
треугольником с основанием  ,
,
 .
. будет равна
будет равна .
.
 от
от  .
.
 значение
значение  или 3,3%.
или 3,3%. осуществляется с помощью широкополосных частотных дискриминаторов, применяемых, в частности, в следящих ЧМ РВ.
осуществляется с помощью широкополосных частотных дискриминаторов, применяемых, в частности, в следящих ЧМ РВ.
 .
.
 для принятой аппроксимации спектра (1.44)
для принятой аппроксимации спектра (1.44) .
. ,
,
 - дисперсия спектральной плотности сигнала
- дисперсия спектральной плотности сигнала  при принятой аппроксимации.
при принятой аппроксимации. . Это приводит к увеличению относительной ошибки отклонения
. Это приводит к увеличению относительной ошибки отклонения  среднеквадратичной частоты от частоты
среднеквадратичной частоты от частоты  примерно на 0,3% при
примерно на 0,3% при  , т.е.
, т.е.  .
. и
и  ), вызванных эволюциями ЛА, форма спектра изменяется.
), вызванных эволюциями ЛА, форма спектра изменяется. . Счетчики и ЧД позволяют получить практически одинаковую точность оценки частоты в присутствии шума [4]. Однако дискриминаторы, имеющие достаточно высокую стабильность частотной характеристики, неспособны работать в таком же широком частотном диапазоне, как счетчики. По этой причине в РВ, построенных по принципу неследящих измерителей находят широкое применение счетные методы измерения частоты. Уменьшение требуемой относительной ширины рабочего диапазона частот для возможности применения ЧД достигается путем переноса спектра преобразованного сигнала в область более высоких частот. Это осуществляется при выполнении приемника ЧМ РВ по супергетеродинной схеме, в которой основное усиление производится на промежуточной частоте.
. Счетчики и ЧД позволяют получить практически одинаковую точность оценки частоты в присутствии шума [4]. Однако дискриминаторы, имеющие достаточно высокую стабильность частотной характеристики, неспособны работать в таком же широком частотном диапазоне, как счетчики. По этой причине в РВ, построенных по принципу неследящих измерителей находят широкое применение счетные методы измерения частоты. Уменьшение требуемой относительной ширины рабочего диапазона частот для возможности применения ЧД достигается путем переноса спектра преобразованного сигнала в область более высоких частот. Это осуществляется при выполнении приемника ЧМ РВ по супергетеродинной схеме, в которой основное усиление производится на промежуточной частоте. м до
м до  м коэффициент усиления УРЧ должен возрастать по квадратичному закону
м коэффициент усиления УРЧ должен возрастать по квадратичному закону  ≈
≈  (6 дБ на октаву). Следовательно, спектральная плотность шума в полосе УРЧ также изменяется по квадратичному закону
(6 дБ на октаву). Следовательно, спектральная плотность шума в полосе УРЧ также изменяется по квадратичному закону  ≈
≈  , поставив в соответствие средним частотам шума и сигнала весовые коэффициенты, равные мощности шума
, поставив в соответствие средним частотам шума и сигнала весовые коэффициенты, равные мощности шума  и мощности сигнала
и мощности сигнала  :
: ,
,
 - отношение сигнал/шум.
- отношение сигнал/шум. .
.
 кГц,
кГц,  кГц, то вполне оправдано допущение
кГц, то вполне оправдано допущение  <<
<<  и, следовательно,
и, следовательно, ≈
≈  кГц.
кГц. .
. при
при  кГц и
кГц и  построена на рис. 1.11.
построена на рис. 1.11.
 кГц и
кГц и 
 , изменяются в зависимости от отношения сигнал/шум и взаимного расположения их спектров. Абсолютная погрешность измерения средней частоты с учетом (1.49) равна
, изменяются в зависимости от отношения сигнал/шум и взаимного расположения их спектров. Абсолютная погрешность измерения средней частоты с учетом (1.49) равна .
.
 >>1 относительную погрешность измерения средней частоты сигнала представим в виде
>>1 относительную погрешность измерения средней частоты сигнала представим в виде .
.
 может быть определено из выражения
может быть определено из выражения .
.
 ≈0,1, получим
≈0,1, получим  ,
, .
.
 при
при  кГц для трех значений погрешности
кГц для трех значений погрешности  .
. требуемое отношение сигнал/шум должно быть более 20 дБ при измерении высоты около 50 м (
требуемое отношение сигнал/шум должно быть более 20 дБ при измерении высоты около 50 м ( кГц) и более 40 дБ при измерении высот порядка метра (
кГц) и более 40 дБ при измерении высот порядка метра ( кГц). При равенстве средней частоты сигнала средней частоте шума, т.е.
кГц). При равенстве средней частоты сигнала средней частоте шума, т.е.  , рассматриваемая погрешность отсутствует, в РВ-4
, рассматриваемая погрешность отсутствует, в РВ-4  при
при  м. Для получения таких больших значений (до 40 дБ) отношений с/ш q в неследящих РВ приходится увеличивать мощность передатчика
м. Для получения таких больших значений (до 40 дБ) отношений с/ш q в неследящих РВ приходится увеличивать мощность передатчика  до 0,5 Вт. Требуемая же
до 0,5 Вт. Требуемая же  м, рассчитанная в соответствии с основным уравнением дальности для отношения
м, рассчитанная в соответствии с основным уравнением дальности для отношения  , составляет всего 5... 10 мВт.
, составляет всего 5... 10 мВт.


 .
. ,
,  кГц при
кГц при  ,
,  кГц.
кГц. определяется диапазоном возможных разностных частот (в зависимости от диапазона измеряемых высот). Например, при
определяется диапазоном возможных разностных частот (в зависимости от диапазона измеряемых высот). Например, при  кГц выигрыш
кГц выигрыш  дБ.
дБ. усилителя резонансной частоты. При этом возможна работа при минимальном отношении сигнал/шум, которое в данном случае определяется требованиями устойчивого срабатывания схемы захвата. Для этого достаточно иметь
усилителя резонансной частоты. При этом возможна работа при минимальном отношении сигнал/шум, которое в данном случае определяется требованиями устойчивого срабатывания схемы захвата. Для этого достаточно иметь  дБ.
дБ. и используют следящую систему, позволяющую совмещать среднюю частоту преобразованного сигнала с частотой настройки тракта
и используют следящую систему, позволяющую совмещать среднюю частоту преобразованного сигнала с частотой настройки тракта  . Такие РВ обладают высокой точностью даже при небольших отношениях сигнал/шум на входе РВ, что объясняется как уменьшением мощности шумов на входе измерителя частоты при сужении полосы пропускания тракта обработки, так и снижением систематической погрешности при несовпадении средних частот сигнала и шума. Структурная схема РВ, действие которого основано на описанном принципе, приведена на рис. 1.13.
. Такие РВ обладают высокой точностью даже при небольших отношениях сигнал/шум на входе РВ, что объясняется как уменьшением мощности шумов на входе измерителя частоты при сужении полосы пропускания тракта обработки, так и снижением систематической погрешности при несовпадении средних частот сигнала и шума. Структурная схема РВ, действие которого основано на описанном принципе, приведена на рис. 1.13.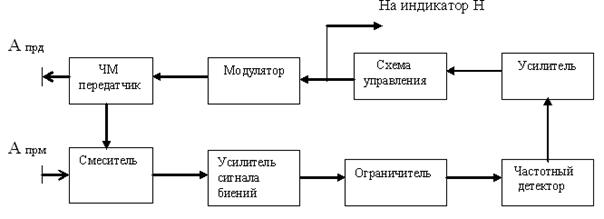
 соответствует узкой полосе пропускания усилителя сигнала биений. В этом случае может быть обеспечено достаточное постоянство измеряемой частоты биений, и
соответствует узкой полосе пропускания усилителя сигнала биений. В этом случае может быть обеспечено достаточное постоянство измеряемой частоты биений, и  связана с высотой H:
связана с высотой H: . (1.55)
. (1.55) , может быть подан непосредственно на индикатор высоты.
, может быть подан непосредственно на индикатор высоты. . На частоту
. На частоту  от частоты настройки
от частоты настройки  =
=  .
. .
.
 Гц,
Гц,  ,
,  МГц,
МГц,  и
и  с; тогда, принимая
с; тогда, принимая  м и подставив в (1.56) числовые значения параметров РВ, получаем
м и подставив в (1.56) числовые значения параметров РВ, получаем  . Откуда следует, что относительная ошибка определения высоты, за счет флуктуаций спектра преобразованного сигнала получается достаточно малой.
. Откуда следует, что относительная ошибка определения высоты, за счет флуктуаций спектра преобразованного сигнала получается достаточно малой. и от времени усреднения сигнала в измерительных цепях T. Флуктуационная погрешность измерения высоты равна [2]
и от времени усреднения сигнала в измерительных цепях T. Флуктуационная погрешность измерения высоты равна [2] .
.
 .
.

 от отношения сигнал/шум
от отношения сигнал/шум .
.
 и
и  см получим
см получим  или 1,4%.
или 1,4%.


