Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Последовательная коррекция динамических свойствСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Коррекция динамических свойств осуществляется с целью выполнения требований по устойчивости и качеству переходного процесса. Осуществляется коррекция с помощью введения в САУ специальных корректирующих звеньев. Эти звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им. Соответственно они и называются: последовательные либо параллельные корректирующие звенья. Последовательные корректирующие звенья можно разделить на три типа: пропорционально-дифференцирующие (ПД), пропорционально-интегри-рующие (ПИ) и пропорционально-интегро-дифференцирующие (ПИД) звенья. ПД-звено имеет передаточную функцию WПД(p) то есть выходная величина этого звена пропорциональна входной величине и ее первой производной. Включение этого звена в САУ приводит к тому, что передаточная функция разомкнутого контура САУ
умножается на WПД(p), то есть принимает вид W(p) WПД(p) В результате характеристический полином замкнутой САУ D(р) будет следующий:
где Положим, что В(р)=k (так как мы исследуем влияние ПД-звена, то логично предположить, что в исходной САУ такого звена не было, но тогда числитель передаточной функции исходной САУ содержит лишь величину k). Тогда можно видеть, что в характеристическом полиноме замкнутой САУ изменится коэффициент при р в первой степени. Включение двух ПД-звеньев приведет к изменению коэффициента и при Рассмотрим в качестве примера применение данного звена для стабилизации, то есть обеспечения устойчивости САУ с астатизмом выше первого порядка (порядок астатизма - это число интегрирующих звеньев в приведенной одноконтурной САУ). Передаточную функцию разомкнутой САУ с порядком астатизма, равным r, можно представить в виде:
Соответственно характеристический полином замкнутой САУ будет: D(р)=В(р)+ Если В(р)=k, то из последнего выражения следует вывод о том, что САУ с порядком астатизма r>1 являются структурно неустойчивыми, поскольку в D(р) отсутствуют члены с р в степени от единицы до (r-1) (по критерию устойчивости Гурвица). Введем теперь в систему (r-1) ПД-звеньев. При этом в характеристическом полиноме появятся недостающие звенья:
Следовательно, САУ становится структурно устойчивой. Влияние ПД-звена на качество переходного процесса продемонстрируем на примере последовательного соединения этого звена с апериодическим звеном с передаточной функцией
Передаточная функция последовательного соединения этих звеньев: W0(p)WПД(р) Соответственно переходная функция
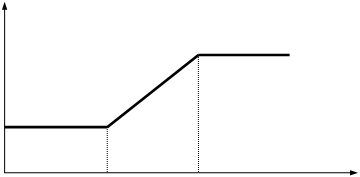
где Из последнего выражения видно, что отрицательное дополнительное воздействие по производной снижает быстродействие, а положительное, наоборот, повышает его. Например, при W0(p)WПД(р) Реальные ПД-звенья обладают инерционностью, то есть имеют следующую передаточную функцию: WПД(р) где ТПД Все сказанное выше об идеальном ПД-звене справедливо и для реального с той только разницей, что реальное слабее влияет на быстродействие и на области устойчивости. ЛАЧХ реального ПД-звена приведена на рис.4.10.
+20 дБ/дек
Рис.4.10 ПД-звено является фильтром верхних частот, так как его ЛАЧХ растет с увеличением частоты. Поэтому введение этого звена в САУ расширяет ее полосу пропускания, повышает быстродействие. Практически наиболее просто ПД-звенья реализуются в электрических системах постоянного тока, где они представляют собой пассивные RC- и RL- цепочки. Один из возможных вариантов представлен на рис.2.4. Пример реализации ПД-звена на операционном усилителе приведен на рис.4.11.
R1
Uвх Uвых
Рис.4.11
Пропорционально-интегрирующее (ПИ) звено имеет передаточную функцию WПИ(р) В случае ТПИ=0 получаем идеальное ПИ-звено. Последнее выражение можно представить так: WПИ(р) Таким образом, ПИ-звено эквивалентно последовательному соединению интегрирующего звена и ПД-звена. По своим частотным свойствам ПИ-звено противоположно ПД-звену, являясь фильтром нижних частот. ЛАЧХ ПИ-звена приведена на рис.4.12.
-20 дБ/дек
-20 дБ/дек
0 Рис. 4.12
Передаточная функция пропорционально-интегро-дифференциру-ющего (ПИД) звена
Это звено эквивалентно последовательному соединению интегрирующего звена и пропорционально-дифференцирующего с воздействием по двум производным или, что то же самое, последовательному соединению ПИ-звена и ПД-звена с одной производной. Таким образом, ПИД-звено повышает порядок астатизма, как и ПИ-звено, но при этом одновременно дает более сильную коррекцию динамических свойств САУ. Такое звено подчеркивает как нижние, так и средние частоты, подавляя средние, как видно из приближенной ЛАЧХ ПИД-звена, приведенной на рис.4.12.
-20 дБ/дек
+20 дБ/дек
0 lgw Рис.4.12
В связи с видом ЛАЧХ ПИД-звеньями называют не только звенья с указанной выше передаточной функцией Вообще указанные выше наименования типов последовательных корректирующих звеньев в значительной степени условны, прежде всего, из-за инерционности реальных корректирующих звеньев. Наиболее просто синтез последовательного корректирующего устройства можно произвести по ЛАЧХ. Для этого необходимо использовать ЛАЧХ нескорректированной САУ Gнескорр(w) и желаемую ЛАЧХ, Gскорр(w) соответствующую заданному переходному процессу. ЛАЧХ Gскорр(w) получают с помощью частотного критерия качества, иллюстрированного приведенными выше графиками (см. рис.4.7, рис.4.8). При последовательном соединении звеньев справедливо соотношение Wскорр(р)= Wнескорр(р)Wку(р), где Wку(р) - передаточная функция синтезируемого последовательного корректирующего устройства. Следовательно Wку(р)= Wскорр(р)/ Wнескорр(р). Перейдем к частотной форме записи, используя логарифмические единицы: 20lg| Wку(р)(jw)|=20lg| Wcкорр.(jw)|-20lg| Wнескорр.(jw)|; Gку(w)=Gскорр.(w) - Gнескорр.(w). Тип и параметры последовательного корректирующего устройства получают следующим образом: 1) графически вычитают из желаемой ЛАЧХ ординаты ЛАЧХ исходной системы; 2) упрощают ЛАЧХ корректирующего устройства, сравнивают с ЛАЧХ имеющихся в справочных данных типовых корректирующих звеньев и выбирают конкретную схему корректирующего звена; 3) находят по сопрягающим частотам параметры схемы корректирующего устройства.
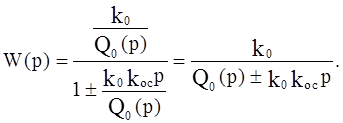
Параллельная коррекция Параллельные корректирующие устройства реализуются в виде обратных связей. Корректирующие обратные связи (охватывающие отдельные звенья или участки цепи САУ) помимо классификации на отрицательные и положительные, делятся на жесткие и гибкие. Жесткие обратные связи осуществляются статическими звеньями Рассмотрим действие идеальной жесткой обратной связи с передаточной функцией Пусть эта обратная связь охватывает апериодическое звено с передаточной функцией как показано на рис.4.13.
Рис.4.13 В результате охвата обратной связью получим
где Постоянная времени и коэффициент передачи уменьшаются при отрицательной обратной связи и увеличиваются при положительной. На рис.4.14 иллюстрируется физическая суть механизма уменьшения инерционности при отрицательной обратной связи.
T
Рис.4.14 Переходная характеристика Кривая сигнала При инерционности обратной связи скорость роста В качестве жесткой корректирующей обратной связи применяется в основном отрицательная обратная связь для уменьшения инерционности. Заметим попутно, что отрицательная обратная связь имеет и другие достоинства: она уменьшает остающуюся вне рассмотрения нелинейность статической характеристики звена, нестабильность его параметров во времени, а также при наличии шумов (помех) на входе или внутри звена уменьшает уровень шумов на выходе. При охвате жесткой обратной связью интегрирующего звена с
где
Таким образом, интегрирующее звено превращается в статическое. Практический интерес при этом представляет лишь отрицательная связь (при положительной звено получается неустойчивым). Рассмотрим далее влияние безинерционной гибкой обратной связи с В общем случае для звена с передаточной функцией
Таким образом, гибкая обратная связь, не влияя на коэффициент передачи охватываемого звена, изменяет коэффициент при р в знаменателе передаточной функции. В случае апериодического звена изменится постоянная времени (при положительной обратной связи уменьшится, а при отрицательной - возрастет), в случае колебательного - изменится коэффициент демпфирования.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА 5.1. Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М. Наука, 1989. - 304 с. 5.2. Теория автоматического управления. Ч.1. Теория линейных систем автоматического управления/ Н.А. Бабаков и др.; Под ред. А.А. Воронова. - М.: Высшая школа, 1986. - 367 с. 5.3. Бабаков Н.А. и др. Теория автоматического управления. Ч.1/Под ред. А.А. Воронова. - М.: Высшая школа, 1977. - 303 с. 5.4. Юревич Е.И. Теория автоматического управления. - М.: Энергия, 1975. - 416 с. 5.5. Бесекерский В.А. и др. Сборник задач по теории автоматического регулирования и управления. - М.: Наука, 1978. - 512 с.
|
|||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 631; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.008 с.) |






 и т.д. Изменение же этих коэффициентов изменяет условия устойчивости и качество переходного процесса.
и т.д. Изменение же этих коэффициентов изменяет условия устойчивости и качество переходного процесса.
 .
.



 - переходная функция апериодического звена.
- переходная функция апериодического звена. полностью компенсируется инерционность апериодического звена:
полностью компенсируется инерционность апериодического звена:


 G(w)
G(w)




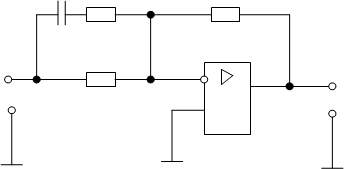 С R2 R3
С R2 R3





 G(w)
G(w)

 lgw
lgw
 G
G , но и любые другие звенья, ЛАЧХ которых имеет минимум на средних частотах и растет в сторону как низких, так и высоких частот.
, но и любые другие звенья, ЛАЧХ которых имеет минимум на средних частотах и растет в сторону как низких, так и высоких частот. , гибкие - дифференцирующими
, гибкие - дифференцирующими  .
.











 Х
Х









 0 t
0 t
 на входе звена имеет всплеск вначале. За счет его происходит форсировка на входе по сравнению с окончательным установившимся значением
на входе звена имеет всплеск вначале. За счет его происходит форсировка на входе по сравнению с окончательным установившимся значением  еще более замедлится, увеличится длительность форсировки на входе звена, в результате чего еще более повысится быстродействие.
еще более замедлится, увеличится длительность форсировки на входе звена, в результате чего еще более повысится быстродействие. имеем:
имеем:


 , называемой еще гибкой обратной связью по скорости.
, называемой еще гибкой обратной связью по скорости. имеем:
имеем: