Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Е). Системы стабилизации, программного управления и следящие.Содержание книги
Похожие статьи вашей тематики
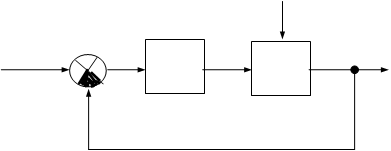
Поиск на нашем сайте Системы стабилизации характеризуются неизменностью задающего воздействия. Задача таких систем - поддержание с допустимой ошибкой выходной величины при наличии возмущающих воздействий. Системы программного управления отличаются тем, что задающее воздействие изменяется по заранее установленному закону. В следящих системах задающее воздействие также является величиной переменной, но заранее закон его изменения неизвестен. Источником сигнала является внешнее явление. Таким образом, для систем стабилизации G=const, для следящих систем и систем программного управления G=var. Ж). Системы оптимальные и неоптимальные (обыкновенные). В оптимальных системах должно обеспечиваться оптимальное значение какого-либо из параметров функционирования. Но так как связь между отдельными параметрами обычно противоречивая, то на остальные параметры накладывается ограничение (значение их должно быть не хуже заданного уровня). В обыкновенных системах указанная задача оптимизации не ставится. В завершение вводного раздела введем понятие функциональной схемы (не путать со схемой электрической функциональной!), принятое в теории автоматического управления. При составлении функциональной схемы система разбивается на такие узлы, каждый из которых несет законченное функциональное назначение (сложность каждого из таких узлов при этом значения не играет). Выделенные таким образом узлы на функциональной схеме соединяются линиями связи с указанием направления распространения сигналов. Какими-бы ни были системы автоматического управления (хотя бы в соответствии с представленной здесь классификацией, физическим принципом действия, областью применения и т.д.), они в целом имеют одну и ту же функциональную схему, но только некоторые элементы могут отсутствовать или, наоборот, повторяться. Такая обобщенная функциональная схема представлена на рис.1.4.
1 3 4 5 6
Рис.1.4
Здесь обозначено: 1- задающее устройство, формирующее задающее воздействие G; 2 - сумматор (сектор круга зачерняется, если подходящий к нему сигнал имеет знак “минус”, например, реализуется отрицательная обратная связь); 3 - последовательное корректирующее устройство; 4 - усилитель; 5 - исполнительный элемент; 6 - объект управления; 7 - местная обратная связь (параллельное корректирующее устройство); 8 - главная обратная связь. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САУ Передаточная функция Целью рассмотрения САУ может быть решение одной из двух задач: задачи анализа или задачи синтеза. Но в любом случае порядок исследования САУ включает в себя следующие этапы: математическое описание, исследование установившихся режимов, исследование переходных режимов. Рассмотрим случай, когда в замкнутой системе можно выделить объект О и управляющее устройство УУ, как показано на рис.2.1.
g(t) e(t) y(t) x(t) УУ О
Рис.2.1 Общее уравнение САУ получается из системы уравнений объекта и управляющего устройства. Состояние объекта характеризуется выходной величиной x(t), регулирующим воздействием y(t) и возмущением f(t). Тогда выходная величина может быть представлена функцией:
Состояние управляющего устройства характеризуется регулирующим воздействием y(t) и входным воздействием e(t). Процессы в УУ будут описываться двумя уравнениями:
Три последних уравнения полностью описывают процессы в САУ. Если в этих уравнениях исключить переменные y(t) и e(t), то получим дифференциальное уравнение САУ:
Это уравнение оценивает состояние системы во времени, определяет переходные процессы и обычно называется уравнением динамики. Однако в форме дифференциальных уравнений математическое описание в теории автоматического управления обычно не применяется вследствие сложности решения таких уравнений. Исследование САУ существенно упрощается при использовании прикладных математических методов операционного исчисления. Возьмем некоторый элемент САУ, имеющий один вход и один выход. Дифференциальное уравнение элемента в общем случае имеет вид:
Если в уравнение (2.1) вместо функции времени
то оказывается, что дифференциальное уравнение, содержащее функции
Такой переход от дифференциального уравнения к однозначно соответствующему ему алгебраическому уравнению называется преобразованием Лапласа. Функция Операция перехода от искомой функции
Операция перехода от изображения
Формально переход от дифференциального уравнения к алгебраическому относительно изображения при нулевых начальных условиях получается путем замены символов дифференцирования оригиналов функций Так как возможность однозначного перехода от дифференциального уравнения к алгебраическому значительно упрощает расчеты, то важно убедиться в правомерности такого перехода. Обозначим в исходном дифференциальном уравнении
Согласно правилу интегрирования по частям
При нулевых начальных условиях
Таким образом, операция дифференцирования оригинала соответствует операции умножения изображения этого оригинала на комплексное число Так как
Каждый элемент САУ в общем случае описывается дифференциальным уравнением вида (2.1). Следовательно, при выводе дифференциального уравнения системы в целом необходимо совместно решить несколько дифференциальных уравнений высших порядков. Преобразование дифференциальных уравнений по Лапласу позволяет свести эту задачу к решению системы алгебраических уравнений. Определив из алгебраических уравнений изображение Кроме того, преобразование дифференциального уравнения по Лапласу дает возможность ввести понятие передаточной функции. Вынеся в уравнении (2.3)
Определим из этого уравнения отношение изображения выходной величины к изображению входной:
Отношение изображения выходной величины элемента (или системы) к изображению его входной величины при нулевых начальных условиях называется передаточной функцией элемента (или системы). Передаточная функция W(p) является дробно-рациональной функцией комплексной переменной р:
где
Из определения передаточной функции следует, что:
Передаточная функция является основной формой математического описания объектов в теории автоматического управления и так как она полностью определяет динамические свойства объекта, то первоначальная задача расчета САУ сводится к определению передаточной функции. Рассмотрим примеры по определению передаточной функций некоторых простейших схем, характерных для электроники.
Пример 2.1. Вывести передаточную функцию для схемы на рис.2.2, считая входным воздействием приложенное напряжение u, а выходным - ток в цепи i. R L
u
Рис.2.2
Процессы в схеме описываются уравнением:
Перейдем к изображениям по Лапласу:
Составим передаточную функцию как отношение изображения выходной величины к изображению входной величины:
где
Передаточные функции принято записывать в такой форме, чтобы свободные члены полиномов от р равнялись бы единице, что и сделано как в рассмотренном примере, так и в последующих.
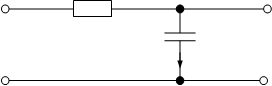
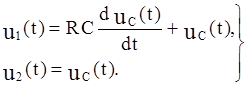
Пример 2.2. Вывести передаточную функцию схемы на рис.2.3, считая входной величиной напряжение R
i
Рис.2.3
При выводе передаточной функции будем считать, что цепочка не нагружена (никаких элементов к выходным зажимам не подключено, либо эти элементы имеют сопротивление, стремящееся к бесконечности) и сопротивление источника входного напряжения настолько мало, что им можно пренебречь.
Подставим (в) в (а):
Перейдем к изображениям:
Передаточная функция
где
Пример 2.3. Вывести передаточную функцию схемы на рис.2.4, считая входной величиной
Рис.2.4
Составляем два уравнения по второму закону Кирхгофа, одно уравнение по первому закону Кирхгофа и расписываем выходную величину:
Из уравнений (б) и (в) соответственно получим:
Подставим полученные выражения
Перейдем к изображениям:
Передаточная функция:
где
Пример 2.4. Вывести передаточную функцию схемы на рис.2.5, считая входной величиной
Рис.2.5
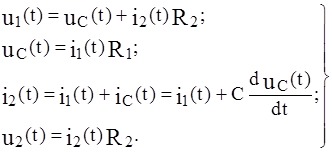
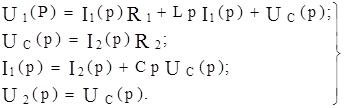
Система уравнений электрического равновесия схемы для мгновенных значений величин:
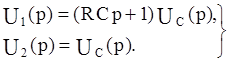
Последнее соотношение здесь, конечно, не уравнение, а обозначение выходной величины. Уравнения в операторной форме:
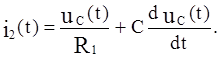
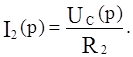
Из уравнения (б)
Подставим полученное значение
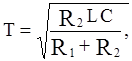
Последнее соотношение подставим в (а) и определим передаточную функцию:
где
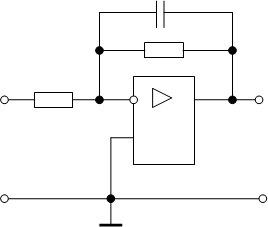
Пример 2.5. Вывести передаточную функцию схемы на рис.2.6, а, содержащей операционный усилитель. C
R2 Zoc(p)
R1 DA
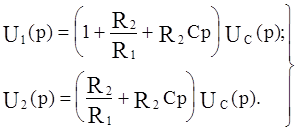
а) б) Рис.2.6 Операционными усилителями называются усилители постоянного тока малой мощности с большим коэффициентом усиления. В настоящее время они выполняются по интегральной технологии, т.е. в виде микросхем. Выведем вначале передаточную функцию для типового включения операционного усилителя, показанного на рис.2.6, б, в общем виде. Так как реальные микросхемы операционных усилителей имеют большой коэффициент усиления С учетом принятых допущений напряжение между инвертирующим и неинвертирующим входами операционного усилителя
Отсюда следует, что напряжение на входе “-“ (инвертирующем)» 0 и тогда
Кроме того, учитывая, что
Выходное напряжение схемы тогда определяется следующим соотношением:
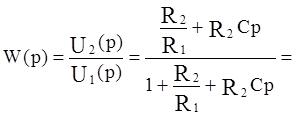
Теперь легко получить выражение для передаточной функции схемы (см. рис.2.6, б):
Знак “минус” в последнем выражении указывает на то, что полярность выходного напряжения схемы противоположна полярности входного напряжения. Для определения передаточной функции схемы на рис.2.6, а вначале найдем сопротивление конденсатора Мгновенное значение тока через емкость равно:
Переходя к изображениям по Лапласу:
Из последнего равенства
(Аналогично для индуктивности можно получить Используя выведенное значение
где
Частотные характеристики Если на вход линейной непрерывной системы (или отдельного звена) подать синусоидальные (гармонические) колебания с постоянными амплитудой и частотой Подавая на вход системы гармонические колебания с постоянной амплитудой, но различными частотами, на выходе системы тоже получаем гармонические колебания с теми же частотами, но различными амплитудами и фазами относительно входных колебаний. Введем в рассмотрение отношение комплексных амплитуд выходных и входных колебаний:
Функция
В различных формах записи функцию
где
При фиксированном значении частоты
+j
+1
Рис.2.7 Изменение частоты приведет к изменению величины и расположения вектора на комплексной плоскости, а конец вектора опишет некоторую траекторию. Геометрическое место концов векторов комплексной частотной функции при изменении частоты от нуля до бесконечности называется амплитудно-фазовой частотной характеристикой (АФЧХ). В свою очередь все величины, представленные в (2.8), являются соответствующими частотными функциями, а построенные по выражениям для функций графики - частотными характеристиками.
Между всеми частотными характеристиками существует непосредственная связь, вытекающая из тригонометрических соотношений и поясняемая рис.2.7.
В практических расчетах чаще всего амплитудную и фазовую частотные характеристики изображают в логарифмическом масштабе, что позволяет в значительной степени сократить объем вычислительных работ. Логарифмической единицей усиления или ослабления мощности сигнала при прохождении его через какое-либо устройство при выражении десятичным логарифмом величины отношения мощности на выходе
Но так как бел является достаточно крупной единицей усиления (ослабления) мощности (увеличению мощности в 10 раз соответствует 1 Б), то за единицу измерения ее принят децибел 1дБ=0,1 Б. С учетом этого можно записать:
Величина логарифма амплитудной частотной характеристики, выраженная в децибелах
называется логарифмической амплитудно-частотной характеристикой (ЛАЧХ). Таким образом, изменению отношения двух амплитуд в 10 раз соответствует изменение усиления на 20 дБ, в 100 раз - на 40 дБ, в 1000 раз - на 60 дБ и т.д. Вычислим, какому отношению амплитуд соответствует один децибел, два и т.д.
Фазовая частотная характеристика За единицу измерения частоты используется логарифмическая единица декада. Декадой называется интервал частот между какой-либо величиной частоты и ее десятикратным значением. В логарифмическом масштабе частот отрезок в одну декаду не зависит от частоты и имеет длину, равную
ЛАЧХ и ЛФЧХ строят обычно совместно, используя общую ось абсцисс (ось частот). Начало координат невозможно взять в точке Точка пересечения ЛАЧХ с осью абсцисс называется частотой среза Из рассмотренных здесь частотных характеристик две можно получить экспериментально-амплитудную
|
||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 1008; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.011 с.) |






















 f(t)
f(t)





 и
и  ввести функции
ввести функции  и
и  комплексного переменного р, поставив условием, что эти функции связаны зависимостями:
комплексного переменного р, поставив условием, что эти функции связаны зависимостями: (2.2)
(2.2)
 (2.3)
(2.3) называется изображением функции
называется изображением функции  , функция
, функция 
 как
как
 ,
,  соответственно на
соответственно на  и функций
и функций  , как и с другими членами алгебраического уравнения, можно производить различные действия: умножение, деление, вынесение за скобки и т.д.
, как и с другими членами алгебраического уравнения, можно производить различные действия: умножение, деление, вынесение за скобки и т.д. и согласно интегралу (2.2) найдем изображение:
и согласно интегралу (2.2) найдем изображение:



 и с учетом (2.2) получим:
и с учетом (2.2) получим:
 то
то  и т.д.
и т.д. и
и  за скобки, получим:
за скобки, получим:

 (2.4)
(2.4)
 - полином степени n,
- полином степени n, - полином степени m.
- полином степени m.
 i
i


 - коэффициент передачи,
- коэффициент передачи, - постоянная времени.
- постоянная времени. , а выходной -
, а выходной -  .
.


 - постоянная времени.
- постоянная времени.
 C
C R1
R1

 и
и  в уравнения (а) и (г):
в уравнения (а) и (г):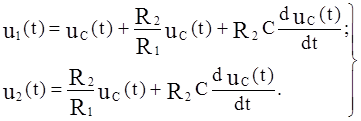

 - коэффициент передачи,
- коэффициент передачи, ,
,  - постоянные времени.
- постоянные времени.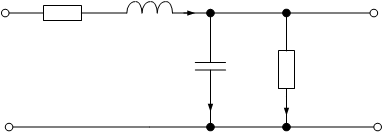 R1 L
R1 L 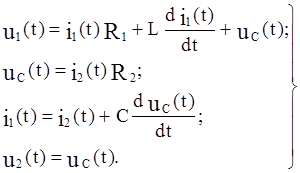
 в (в):
в (в):



 - постоянные времени.
- постоянные времени.
 Z1(p)
Z1(p)  DA
DA 


 и большое входное сопротивление
и большое входное сопротивление  , то предположим, что
, то предположим, что  и
и  .
.

 , можно считать
, можно считать  и, следовательно
и, следовательно

 (2.5)
(2.5) в операторной форме.
в операторной форме.

 ).
).

 - коэффициент передачи,
- коэффициент передачи, - постоянная времени.
- постоянная времени. , то после затухания переходных процессов на выходе также возникают синусоидальные колебания
, то после затухания переходных процессов на выходе также возникают синусоидальные колебания  c той же частотой, но с другой амплитудой и сдвинутые по фазе относительно входных колебаний. Как известно из курса “Основы теории цепей, часть 1”, синусоидально изменяющиеся величины удобно изображать с помощью комплексных амплитуд. Комплексные амплитуды рассматриваемых здесь входных и выходных колебаний можно записать как
c той же частотой, но с другой амплитудой и сдвинутые по фазе относительно входных колебаний. Как известно из курса “Основы теории цепей, часть 1”, синусоидально изменяющиеся величины удобно изображать с помощью комплексных амплитуд. Комплексные амплитуды рассматриваемых здесь входных и выходных колебаний можно записать как  и
и 

 (2.6)
(2.6) называется комплексной частотной и получается чисто формально, без каких-либо вычислений, путем замены в выражении передаточной функции переменной р на переменную jw:
называется комплексной частотной и получается чисто формально, без каких-либо вычислений, путем замены в выражении передаточной функции переменной р на переменную jw: (2.7)
(2.7) (2.8)
(2.8) и
и  - действительная и мнимая части комплексной частотной функции,
- действительная и мнимая части комплексной частотной функции, и
и  - модуль и аргумент комплексной частотной функции.
- модуль и аргумент комплексной частотной функции. комплексную частотную функцию можно изобразить вектором на комплексной плоскости, как показано на рис.2.7.
комплексную частотную функцию можно изобразить вектором на комплексной плоскости, как показано на рис.2.7.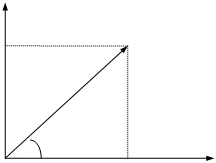






 называется вещественной частотной, а
называется вещественной частотной, а  - мнимой частотной характеристикой.
- мнимой частотной характеристикой. показывает отношение амплитуд выходного и входного гармонических сигналов при изменении частоты и называется амплитудной частотной характеристикой.
показывает отношение амплитуд выходного и входного гармонических сигналов при изменении частоты и называется амплитудной частотной характеристикой.


 к мощности на входе
к мощности на входе  в технике принят бел. Так как мощность сигнала пропорциональна квадрату его амплитуды, получим:
в технике принят бел. Так как мощность сигнала пропорциональна квадрату его амплитуды, получим:





 То есть 1 дБ 1,122.
То есть 1 дБ 1,122. 4 дБ 1,585;
4 дБ 1,585; ), называется логарифмической фазовой частотной характеристикой (ЛФЧХ).
), называется логарифмической фазовой частотной характеристикой (ЛФЧХ).
 , так как
, так как  . Поэтому начало координат можно брать в любой удобной точке в зависимости от интересующего диапазона частот.
. Поэтому начало координат можно брать в любой удобной точке в зависимости от интересующего диапазона частот. . Ось абсцисс соответствует значению
. Ось абсцисс соответствует значению  , то есть прохождению амплитуды сигнала в натуральную величину (поэтому еще говорят, что на частоте среза система теряет усилительные свойства).
, то есть прохождению амплитуды сигнала в натуральную величину (поэтому еще говорят, что на частоте среза система теряет усилительные свойства).