
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Анализ лачх нескорректированного электроприводаСодержание книги
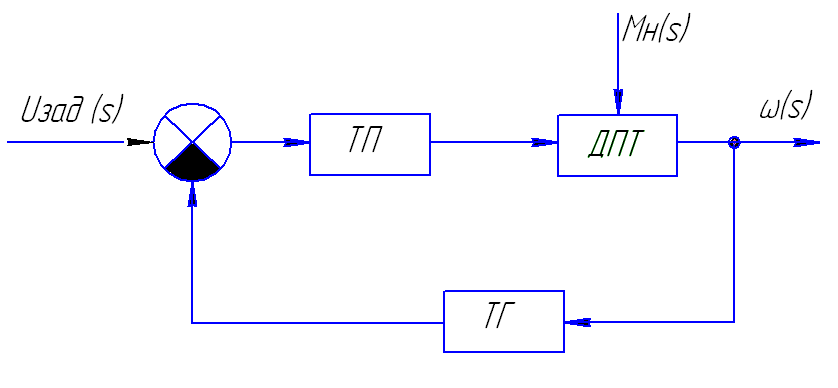
Поиск на нашем сайте Составим принципиальную электрическую схему системы регулирования частоты вращения ДПТ:
ДПТ - двигатель постоянного тока ТП - тиристорный преобразователь ТГ - тахогенератор РС - регулятор скорости Рисунок 3.3 - Принципиальная электрическая схема системы регулирования частоты вращения ДПТ. Данные выбранного электродвигателя привести в таблице 3.5. Таблица 3.5 - Данные электродвигателя ПБВ160L
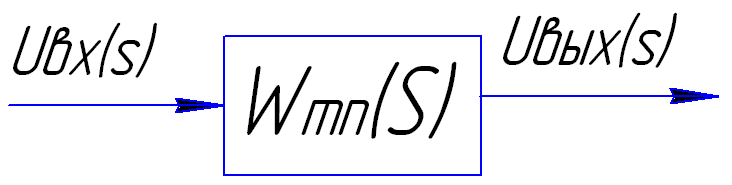
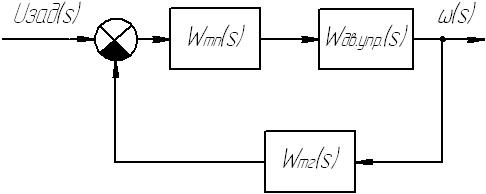
Построим функциональную схему исследуемой системы автоматического управления, то есть разобьем систему на составляющие её элементы, исходя из выполняемых или функций с указанием связи между ними.
Uзад (s) - задающее напряжение Мн (s) - момент нагрузки внешнего воздействия ω (s) - угловая частота вращения Рисунок 3.4 - Функциональная схема исследуемой системы автоматического управления. По функциональной схеме, подставляя в неё конкретные функции, составляющих её звеньев, составляем обобщающую структурную схему исследуемой САУ. Структурные схемы тиристорного преобразователя, тахогенератора и двигателя постоянного тока приведены на рисунках 3.5; 3.6; 3.7; 3.8.
Рисунок 3.5 - Структурная схема тиристорного преобразователя
Рисунок 3.6 - Структурная схема тахогенератора.
Рисунок 3.7 - Структурная схема двигателя постоянного тока
Рисунок 3.8- Обобщающая структурная схема исследуемой САУ. Находим расчетные параметры для двигателя постоянного тока. Электромагнитная постоянная времени якорной цепи
где Lя – индуктивность якорной цепи двигателя; Гн; Rя –сопротивление якорной цепи двигателя, Ом.
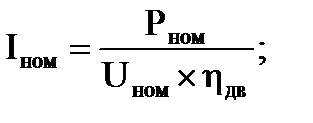
Находим номинальный ток двигателя Iном, А по формуле:
где Рном – номинальная мощность двигателя, Вт; h дв – коэффициент полезного двигателя
Угловую частоту вращения ωном,, с-1, определяем по формуле:
где пном – номинальная скорость вращения, об/мин.
Находим конструктивную постоянную двигателя Сд, по формуле:
где Uном – номинальное напряжение, В; Iном – номинальный ток двигателя, А; ωном – угловая частота вращения, с-1.
Электромеханическая постоянная времени Тм, с., определяется по формуле:
где Сd – конструктивная постоянная двигателя; J – момент инерции приведенный к валу двигателя, кг´м2.
Определим передаточные функции исследуемой САУ. W1 (s), W2 (s), W3 (s), W4 (s) – передаточная функции двигателя постоянного тока. W5 (s) – передаточная функция тиристорного преобразователя. W6 (s) – передаточная функция тахогенератора.
Используя обобщающую структурную схему САУ приведенную на рисунке 3.8 составляем структурную схему ДПТ по управляющему воздействию. Структурная схема ДПТ по управляющему воздействию приведена на рисунке 3.9 и по ней определяем передаточную функцию.
Рисунок 3.9 – Структурная схема ДПТ по управляющему воздействию
По рисунку 3.7, используя правила соединений динамических звеньев, составляем выражение для нахождения передаточной функции по управляющему воздействию.
Используем передаточные функции ДПТ по управляющему и возмущающему воздействию, тогда обобщающая структурная схема примет вид приведенный на рисунке 3.10
Wдв воз (s) – передаточная функция ДПТ по возмущающему воздействию; Wтп(s) – передаточная функция ТП; Wтг(s) – передаточная функция ТГ; Wдв.упр(s) – передаточная функция ДПТ по управляющему воздействию.
Рисунок 3.10 – Структурная преобразованная схема САУ
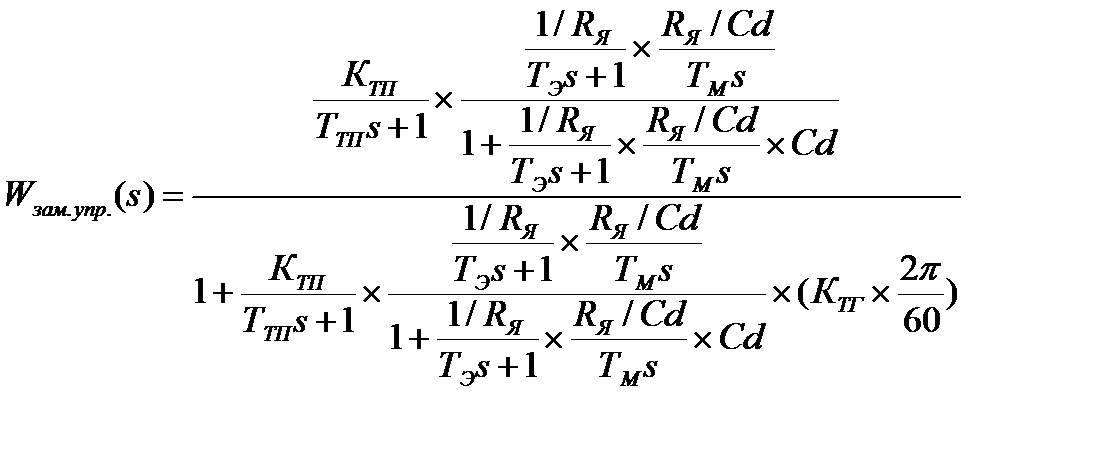
Используя рисунок 3.10, построим замкнутую структурную схему САУ по управляющему воздействию и по ней определим передаточную функцию.
Рисунок 3.11 – Замкнутая структурная схема САУ по управляющему воздействию
Используя рисунок 3.10, построим разомкнутую структурную схему САУ по управляющему воздействию и по ней определяем передаточную функцию.
Рисунок 3.12 – Разомкнутая структурная схема САУ по управляющему воздействию
Решаем уравнение (0,00005782s2+0,0049s+1), находим по формуле:
D =b 2-4ас D=0
Тогда, p1 = -42.38
Значения сопрягающих частот.
Wсоп1,2,3 = 1/0,02 = 50 с-1 Lg50 = 1,69 L(w=1) =20 lg ´ К = 20 lg ´ 1,6 = 8,3 дБ
Наклон низкочастотного участка 0 дБ/дек
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 378; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.153 (0.008 с.) |








 , с, находится по формуле:
, с, находится по формуле: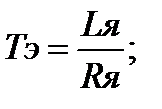 (3.3)
(3.3)

 (3.4)
(3.4)
 (3.5)
(3.5)

 (3.6)
(3.6)
 (3.7)
(3.7)



















 Выражение W(s) примет вид:
Выражение W(s) примет вид:



