
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Продолжительность подъемной операцииСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Исходными данными при расчете кинематики подъемных систем является путь подъема H и продолжительность движения подъемных сосудов Тр, при которой подъемная установка должна обеспечить заданную производительность. Расчетная продолжительность подъемной операции Часовая производительность подъемной установки
где С — коэффициент резерва производительности подъемной установки, учитывающий неравномерность работы ее, по ПТЭ С = 1,5; а — коэффициент, учитывающий выдачу породы, если она транспортируется установкой, предназначенной для полезного ископаемого, при а > 1,1 возникает необходимость в дополнительной установке для транспортирования только породы; Аг — годовая производительность подъемной установки по транспортированию полезного ископаемого, т; nд — расчетное число рабочих дней в году, равное 300; nч — расчетное число часов работы установки в сутки по транспортированию полезного ископаемого и породы; подъем рассчитывают на трехсменную работу, причем nч = 18 ч. Число подъемных операций в час
Расчетная продолжительность подъемной операции (с)
Продолжительность движения подъемных сосудов Тр = Тр.п - tи (42) Продолжительность паузы tи при одновременной загрузке и разгрузке обоих подъемных сосудов принимают для скипов в зависимости от их объема;
Для клетевых подъемов паузу с учетом времени на подачу и исполнение сигнала принимают в зависимости от длины платформы вагонетки: для одноэтажных клетей 19... 23 с и для двухэтажных 43... 51 с. При бицилиндроконических барабанах для двухэтажных клетей пауза увеличивается на 20 с. Время tп на посадку и выход людей из клети определяют из условия, которое на 1 м2 площади пола клети размещается пять человек и принимается равным в секундах количеству людей плюс 10 с при одноэтажных клетях и плюс 25 с при двухэтажных. Время tи при выполнении вспомогательных операций, мин: на загрузку и выгрузку длинного леса, спускаемого непосредственно в клети, — 30; на загрузку и разгрузку рельсов — 40; на загрузку и разгрузку клети при спуске платформы (вагонетки) с лесом — 1; на загрузку и разгрузку клети при спуске взрывчатых веществ — 2. При бадьевой остановке время tи определяют по операциям на верхней приемной площадке, так как операции в забое ствола, по отцепке и прицепке бадьи занимают меньше времени; tи = 50...60 с. Средняя скорость подъема (м/с)
Ориентировочно максимальная скорость подъема vм = αср vcp (44) где αс – множитель скорости - отношения максимальной скорости к средней; при применяемых в данное время диаграммах скорости движения подъемных сосудов αc = 1,15... 1,35.
4.10.2 Кинематика подъемных систем
Графическое изображение изменения скорости подъемных сосудов в зависимости от времени называется диаграммой скорости подъема. Заданными для определения элементов диаграммы скорости являются: расчетная продолжительность движения подъемных сосудов Тр (с); путь (высота) подъема H — расстояние от нижней до верхней приемной площадки, причем при скиповом подъеме нижней приемной площадке соответствует уровень загрузки скипа в зумпфе, м; ускорение a1, согласно ПТЭ, при спуске и подъеме людей принимается не более 1 м/с2; для грузовых подъемов величина ускорения определяется проектом; замедление а3 не должно превышать 0,75 м/с. Трехпериодные диаграммы скорости и ускорения (рис. 43) применяют при клетевом подъеме. 1 Максимальная скорость подъема. Путь подъемных сосудов за время одной подъемной операции складывается из путей h1, h2 и h3, пройденных сосудами соответственно за время ускоренного t1 равномерного t2 и замедленного t3 движения, т.е. H = h1+h2+h3 (45)
Выразив путь через максимальную расчетную скорость
Так как продолжительность движения подъемных. сосудов за время одной подъемной операции Tp=t1+t2+t3, то
Следовательно,
Обозначим
откуда модуль ускорений (м/с
Далее на основании (46) — (48)
и окончательно (м/с)
По данным о подъемных машинах определяют фактическую максимальную скорость 2 Продолжительность (с) и путь (м) ускоренного движения
3 То же, замедленного движения
4 Путь h2= H-h1-h3 (54)
5 Продолжительность движение подъемных сосудов (с) T=t1+t2+t3 (56) С другой стороны, если в формулу (56) подставить t1 и t3 с (40) и (42), а вместо t2 — его значение из (55), то
При правильном расчете величина T по формулам (56) и (57) одинаковая. Формула (57), так же как и приводимые ниже формулы (73) и (80), используют не только для проверки правильности расчета диаграмм скорости, но и для определения в эксплуатируемых установках величины Т, что необходимо при пребывании возможной пропускной способности подъемной установки. Так как vmax ≥ vpm, то Т ≤ Тр, и поэтому фактический коэффициент резерва производительности подъемной установки будет равной или большее расчетного.
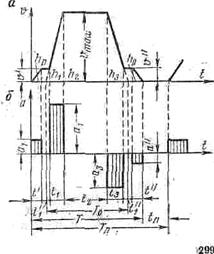
Пятипериодные диаграммы скорости и ускорения (Рис. 44) применяют при подъеме в неопрокидных скипах. Наличие первого и пятого периодов в диаграмме скорости объясняется тем, что для уменьшения динамической погрузки на разгрузочные кривые, разгрузочный ролик и затвор скипа при движении скипа при ходе ролика по разгрузочным кривым должно быть с пониженным ускорением а' и замедлением а".
Расчет элементов пятипериодной диаграммы скорости производят так же, как и трехпериодной диаграммы, но с учетом дополнительных периодов движения подъемных сосудов. В самом деле, можно, иметь трапецеидальную диаграмму с основанием Т0. Площади треугольников abc и a'b'c' представляют путь hP рамы скипа (путь разгрузки) за время движения ролика соответственно порожнего и груженого скипа в разгрузочных кривых. 1 Максимальная скорость подъема (м/с)

В соответствии с данными подъемных машин определяют фактическую максимальную скорость υmax, причем, υmax ≥ υр.м. 2 Ускорение а' (м/с2) и продолжительность t” - (с) движения порожнего скипа при ходе ролика его по разгрузочным кривым
3 Замедление а" (м/с2) и продолжительность t" (с) движения груженого скипа при ходе ролика его по разгрузочным кривым
4 Продолжительность t1 (с) в путь h1; (м) движения скипа с ускорением a1
5 То же, tз и hэ — с замедлением a3.
6 Путь hm (м) и продолжительность t2, (с) равномерного движения h2=H-2hp-h1-h3 (70)
7 Продолжительность движения подъемных сосудов (с) T=t’+t1+t2+t3+t “ (72) С другой стороны, аналогично формуле (57).
Семипериодную диаграмму скорости и ускорения (рис. 45) применяют при опрокидных подъемных сосудах. Равномерное движение подъемного сосуда во время хода его ролика по разгрузочным кривым и схода его с этих кривых необходимо для того, чтобы избежать динамических нагрузок на разгрузочные кривые и ролик, это особенно важно при опрокидных сосудах, когда по разгрузочным кривым двигается значительная масса полезного груза и кузова сосуда. Значение ускорений и скоростей при этом те же, что и для пятипериодной диаграммы скорости с той только разницей, что скорость порожнего сосуда при выходе его ролика из разгрузочных кривых может быть v’ = 2,5 м/с. Такую же диаграмму скорости применяют и при проходческих подъемных установках, при этом hp — путь нагруженной и пустой бадей при их движении не по проводникам (от забоя до предохранительного полка). 1 Максимальную скорость подъема, модуль ускорений и путь H0 определяют соответственно по формулам (59), (58) и (60), причем To = Tp - t' - t'1 - t''1 - t'' +
В соответствии с данными подъемных машин определяют фактическую максимальную скорость vmax, причем vmax ≥ vpm. 2 Величины t1 и h1; t2 и h2; t3 и h3 находят по соответствующим формулам пятипериодной диаграммы скорости. 3 Продолжительность движения подъемных сосудов (с) T = t'' + t1' + t1 + t2 + t3 + t1'' + t'' (79) С другой стороны, аналогично формуле (57)
причем H0 предварительно находится по формуле (60).
Рис. 46 - Четырехпериодная (а) и шестипериодная (б) диаграммы скорости и ускорение Динамика подъемных систем Вращающий момент Мвр, (Н·м), создаваемый подъемным двигателем относительно оси вращения органов навивки каната, затрачивается на преодоление статического Мст и динамического Мдин моментов подъемной системы относительно той же оси: Мвр = Мст + Мдин (81) При подъемной системе с органами навивки постоянного радиуса
или F=Fст+mпa (82) где F, Fcт и mпa — соответственно усилие двигателя, статическое и динамическое усилие подъемной системы, приложенные к окружности навивки каната, H; R - радиус навивки каната, м: mп — масса всех частей подъемной системы, которые двигаются, приведенная к окружности навивки каната, кг; a - линейное ускорение каната, м/с Статическое усилие подъемной системы представляет собой разность статических натяжений каната поднимающейся Fпод и опускающейся Fоп ветвей. Рассматривая общий случай, когда подъемные сосуды прошли от приемных площадок путь hx (рис.47), и пологая, что отрезок каната от верхней приемной площадки до оси копровых шкивов уравновешивается струной каната, найдем
Коэффициент k учитывает сопротивление воздуха при движении подъемных сосудов, трение в проводниках, в подшипниках направляющих шкивов и барабанов, жесткость каната. Эти сопротивления принимают равными 20 % от Qn для клетевых установок, 15 % от QП для скиповых установок при грузоподъемности скипов до 20 т, 10 % от QП для многоканатных установок при грузоподъемности скипов 20... 50 т и роликовых направляющих, т. е. соответственно k = 1,2; k = 1,15 и k = 1,1.
Масса (кг) всех движущихся частей подъемной системы, приведенная к окружности навивки каната,
Длина (м) подъемного каната одноканатной установки
где Н — расстояние от нижней приемной площадки до уровня земной поверхности.
При установке с ведущим шкивом трения вместо двух подъемных канатов имеется один длиной
где ftB.H — расстояние от верхней приемной площадки до оси направляющего шкива. Длина (м) уравновешивающего каната
где 30 — ориентировочная длина каната на образование петли в зумпфе ствола и закрепление каната к подъемным сосудам, м. При определении приведенных масс пользуются заводскими данными. В характеристиках вращающихся частей установки (направляющие шкивы, органы навивки, зубчатая передача) указываются их маховые моменты GD2, В этом случае приведенные массы (кг) каждого из указанных элементов определяют по формуле
Для определения приведенной массы ротора асинхронного двигателя (якоря двигателя постоянного тока) находят: 1) ориентировочную мощность (кВт) подъемного двигателя для установок с двумя сосудами
то же для системы с противовесом
где ρ — коэффициент динамического режима установки, учитывающий динамическую нагрузку. Значения ρ можно принимать: при установке с неопрокидными клетями 1,5... 1,6, с опрокидными 2,2... 2,6; при установке с неопрокидными скипами 1,3... 1,4, с опрокидными 3,4... 1,8; для скиповых многоканатных установок 1,2,.. 1,3; 2) частоту вращения двигателя n (об/мин); к моменту выполнения данного расчета она должна быть известна из расчетов элементов кинематики, так как
3) по известным Vop и п по каталогам асинхронных двигателей или двигателей постоянного тока выбирают двигатель с подходящими мощностью и частотой вращения и там же находят маховой момент ротора (якоря); 4) масса ротора (якоря), приведенная к окружности навивки (кг),
На основании уравнения (94) строят диаграммы изменения движущих усилий в зависимости от времени — нагрузочные диаграммы на двигатель, для чего необходимо определить усилия в характерных точках диаграммы скорости. Подъемная система без уравновешивающего каната (q = 0). Согласно выражению (94) основное динамическое уравнение этой системы: F = Движущие усилия (Н) в характерных точках трехпериодной трапецеидальной диаграммы скорости: в начале подъемной операции
в конце ускоренного движения
в начале равномерного движение
в конце равномерного движения
в начале замедленного движения
в конце подъемной операции
Диаграмма движущих усилий подъемной системы без уравновешивающего каната показана на рис. 48, а, Ш. Здесь же изображено в соответствии с формулой (83) и c учетом коэффициента k изменение статического усилия FСТ — нисходящая прямая, согласно, которой указанное усилие уменьшается от начала к концу движения подъемных сосудов. В связи с непостоянством FСТ, система без уравновешивающего каната является статически неуравновешенной. Усилия в период равномерно ускоренного и равномерно замедленного движения изменяются при подъемной системе без уравновешивающего каната по параболе, так как второе слагаемое усилия [см. формулу (83)] зависит от величины Асинхронный двигатель в период замедленного движения желательно отключать и работать тормозом, для чего в указанный период движущие усилия должны быть отрицательны. Это будет выполнено при условии, что
при этом а3 не должно выйти за пределы, указанные в §4.10.2
Как видно из рис. 48, а, III, усилия, развиваемые подъемным двигателем в различные моменты времени движения, подъемных сосудов, будут различны. При подъемной системе без уравновешивающего каната в начале подъема имеет место максимальное движущее усилие, которое затем уменьшается, становясь при известных условиях отрицательным. Это требует двигателя большой мощности для создания больших движущих усилий в начале подъемной операции и больших тормозных усилий в конце ее. Последнее невыгодно о точки зрения точности управления машиной, так как при известных глубинах шахт необходимо использовать не только в первый период замедленного, но и в период равномерного движения. Подъемная система c равновесным уравновешивающим канатом (q = р). Согласно выражению (263) основное динамическое уравнение такой системы F=kQng+mna (96) Здесь изменение длины отвеса подъемного каната не связано с величиной движущего усилия, так как влияние подъемного каната устраняется равновесным уравновешивающим канатом. Движущие усилия (Н) в характерных точках трехпериодной трапецеидальной диаграммы скорости: в начале и конце ускоренного движения F1 = F2 = kQng + mna1 в начале и конце равномерного движения F3 = F4 = kQng в начале и конце замедленного движения F5 = F6 = kQng - mna3 Нагрузочная диаграмма на двигатель при этой системе изображенная на рис. 48, б, III, где также соответственно формуле (83) и с учетом коэффициента k показан график изменения статического усилия Fст — прямая, параллельная оси t. Постоянство Fcт указывает на то, что подъемная система с равновесным уравновешивающим канатом является статически уравновешенной. При этой системе движущие усилия в течение всего периода замедленного движения могут быть равны нулю. Если продолжительные движущие усилия указывают на необходимость работать двигателем, а отрицательные — тормозом, то при движущих усилиях, равных нулю, не будет иметь места робота двигателем или тормозом. При этом движение подъемных сосудов в третьем периоде диаграммы скорости будет происходить за счет сил инерции, что называется свободным выбегом. Работа со свободным выбегом может быть достигнутая при замедлении;
В связи с невозможностью абсолютно точной дозировки загрузки подъемною сосуда он может остановиться ниже или выше приемной площадки. И в одном и в другом случае необходимо дополнительное включение двигателя, что увеличивает продолжительность подъемной операции, поэтому работа со свободным выбегом практически не применяется. При подъемной системе с тяжелым уравновешивающим канатом [(q – p) > 0] движущие усилия в характерных точках диаграммы скорости определяются аналогично определению усилий при системе без уравновешивающего каната (рис. 48, в, III). При этом изменение статического усилия F В подъемных системах c опрокидными сосудами в начале подъемной операции нарушается уравновешивание собственных масс сосудов, так как кузов опускающегося сосуда в этот момент опирается на разгрузочные кривые и лишь частично нагружает канат. Поэтому усилие (Н) в начале подъемной операции Fн = [ kQn + kyQc + (p-q)H]g + mпа', (98) где kу — 0,35 — коэффициент, который учитывает нарушение уравновешивания. Аналогично в конце подъемной операции Fн = [(k-1)Qn - k Изменение движущих усилий при движении ролика подъемного сосуда по разгрузочным кривым довольно сложно, так как будет меняться степень нарушения уравновешивания собственных масс сосудов (коэффициент kу). Для простоты принимают, что усилие в этот период изменяются по закону прямой линии. Мощность (кВт) на валу подъемного двигателя в любой момент движения подъемных сосудов
При отрицательных значениях усилий ηп должный быть перенесен с знаменателя в числитель. По формуле (100) определяют мощности в характерных точках диаграммы скорости и затем строят диаграммы мощностей на валу подъемного двигателя, которые изображены на рис. 48. Штриховыми линиями показанное изменение мощности в третий период диаграммы скорости при положительных усилиях. Максимальная мощность (пик мощности) будет к концу периода ускоренного движения, которое обуславливается максимальным движущим усилием в это время и максимальной скоростью подъемных сосудов.
|
||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 2066; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.86 (0.01 с.) |

 складывается из времени Тр движения подъемных сосудов при прохождении ними пути H и времени tп — паузы между очередными циклами движения, затрачиваемого на загрузку и разгрузку сосудов, подачу сигналов о возможности начать движение и т.д.
складывается из времени Тр движения подъемных сосудов при прохождении ними пути H и времени tп — паузы между очередными циклами движения, затрачиваемого на загрузку и разгрузку сосудов, подачу сигналов о возможности начать движение и т.д. (39)
(39) (40)
(40) (41)
(41)
 (43)
(43) При подъеме-спуске людей по вертикальным выработкам максимальная скорость движения клетей по ПБ не должна превышать 12 м/с, при транспортировании грузов - определяется проектом.
При подъеме-спуске людей по вертикальным выработкам максимальная скорость движения клетей по ПБ не должна превышать 12 м/с, при транспортировании грузов - определяется проектом. и продолжительности движения t1, t2 и t3, имеем:
и продолжительности движения t1, t2 и t3, имеем: .
.
 (46)
(46) (47)
(47) )
) (48)
(48)
 (49)
(49) подъемных сосудов, причем для обеспечения заданной производительности необходимо, чтобы vmax ≥ vpm.
подъемных сосудов, причем для обеспечения заданной производительности необходимо, чтобы vmax ≥ vpm. (50)
(50) (51)
(51) (52)
(52) (53)
(53) и продолжительность равномерного движения
и продолжительность равномерного движения (55)
(55) (57)
(57) (58)
(58)
 (59)
(59)
 (62)
(62) (63)
(63) (64)
(64) (65)
(65) (66)
(66) (67)
(67) (68)
(68) (69)
(69) (73)
(73) (74)
(74) (75)
(75) (76)
(76) (77)
(77) (78)
(78) (80)
(80)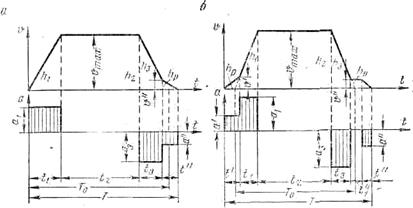 Для уменьшения времени ускоренного движения, а следовательно, и общей продолжительности подъемной операции при неопрокидных скипах можно применять четырехпериодные диаграммы скорости и ускорения (рис. 46, а), а при опрокидных сосудах шестипериодные диаграммы (рис. 46, б). Шестипериодную диаграмму применяют для неопрокидных скипов при управлении установкой с периодом дотяжки
Для уменьшения времени ускоренного движения, а следовательно, и общей продолжительности подъемной операции при неопрокидных скипах можно применять четырехпериодные диаграммы скорости и ускорения (рис. 46, а), а при опрокидных сосудах шестипериодные диаграммы (рис. 46, б). Шестипериодную диаграмму применяют для неопрокидных скипов при управлении установкой с периодом дотяжки  , если
, если  = υ доп ≤ 0,5 м/c
= υ доп ≤ 0,5 м/c

 (83) Основное динамическое уравнение акад. М. М. Федорова для подъемной системы органами навивки постоянного радиуса получается из выражений (83) и (82):
(83) Основное динамическое уравнение акад. М. М. Федорова для подъемной системы органами навивки постоянного радиуса получается из выражений (83) и (82): (84)
(84) В состав движущейся системы подъемной установки входят и поступательно движущиеся части, имеющие линейное ускорение подъема, и части, участвующие во вращательном движении и имеющие линейные ускорения, отличающиеся от линейного ускорения подъема. Поэтому под массой та понимается не истинная масса системы, а расчетная, так называемая приведенная масса к окружности навивки каната, где имеет место линейное ускорение подъема, оказывающая такое же инерционное воздействие, как и фактически существующие, движущиеся со своим ускорением массы подъемной системы.
В состав движущейся системы подъемной установки входят и поступательно движущиеся части, имеющие линейное ускорение подъема, и части, участвующие во вращательном движении и имеющие линейные ускорения, отличающиеся от линейного ускорения подъема. Поэтому под массой та понимается не истинная масса системы, а расчетная, так называемая приведенная масса к окружности навивки каната, где имеет место линейное ускорение подъема, оказывающая такое же инерционное воздействие, как и фактически существующие, движущиеся со своим ускорением массы подъемной системы. Поступательно движущиеся массы получают ускорение, равное линейному ускорению окружности навивки, и приведенная масса их, следовательно, тождественна истинной, поэтому приведению подлежат только массы вращающихся частей. К поступательно движущимся частям, массы которых являются приведенными, относятся полезный груз и собственная масса сосудов, подъемный и уравновешивающий канаты. К вращающимся частям подъемной системы, массы которых подлежат приведению, относятся направляющие шкивы, органы навивки, ротор и зубчатая передача редуктора.
Поступательно движущиеся массы получают ускорение, равное линейному ускорению окружности навивки, и приведенная масса их, следовательно, тождественна истинной, поэтому приведению подлежат только массы вращающихся частей. К поступательно движущимся частям, массы которых являются приведенными, относятся полезный груз и собственная масса сосудов, подъемный и уравновешивающий канаты. К вращающимся частям подъемной системы, массы которых подлежат приведению, относятся направляющие шкивы, органы навивки, ротор и зубчатая передача редуктора. (85)
(85) (86)
(86) (87)
(87) (88)
(88) (89)
(89) (90)
(90) (91)
(91) (92)
(92) (93)
(93) (94)
(94)





 , однако изображение изменения движущих усилий в эти периоды прямой линией является практически достаточно точным.
, однако изображение изменения движущих усилий в эти периоды прямой линией является практически достаточно точным. (95)
(95)

 (97)
(97) изобразится восходящей прямой — статически переуравновешенная подъемная система, необходимость в которой возникает в установках со шкивами трения на шахтах сравнительно малой глубины.
изобразится восходящей прямой — статически переуравновешенная подъемная система, необходимость в которой возникает в установках со шкивами трения на шахтах сравнительно малой глубины. Qc - (p-q)H]g - mпа''. (99)
Qc - (p-q)H]g - mпа''. (99) (100)
(100)


