Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Лабораторная работа № 1. «исон. Исследование режима начальной выставки и калибровки биим на вог в условиях стенда»Содержание книги
Поиск на нашем сайте
Для реализации режима начальной выставки и калибровки БИИМ на ВОГ в условиях стенда используются скоростные (2) и позиционные измерения (3) по GPS, а также курсовое измерение (4). При этом вектор измерения Z примет вид
Действия оператора: I.1. Запустить программу Matlab (ярлык программы I.2. Согласно номеру варианта, из таблицы 1 выбрать значение румба (№) для цикла I. Затем открыть файл kurs0n1.m (для этого нажать load kurs300.mat; % пример, для румба -3000 n=541000; Загрузить файл kurs0n1.m в рабочую область Workspace Matlab, нажав кнопки Debug®Run. I.3. Открыть файл IS24re_VG_StRdr_bqN_dat.m: · указать начальные значения параметров ориентации (углы K 0, ψ0 и θ0), соответствующие заданному румбу (курсу), при t =0 ( курс= - 0.50+значение румба+3600 ) Например (№5, см. таблицу 2 ), румб = -600 %kurs=-60; Roo=107.9434*pi/180; Ko=(-0.5+300)*pi/180; % угол K 0 Psio=0; % угол ψ0 Tetao=0; % угол θ0
I.4. установить начальные значения погрешностей БИИМ (см. таблицу 2, ниже пример для варианта №5): · погрешности моделировании горизонтной системы координат с географической ориентацией осей ( Alphao=-0.1*pi/180; Betao=0.3*pi/180; Gammao=0.1*pi/180; · погрешности в выработке составляющих вектора линейной скорости ( DVEo=0.1; DVNo=0.2; DVHo=-0.2; · погрешности в выработке географических широты, долготы и высоты места ( DFio=30*5e-6/30; DLamo=-30*5e-6/30; Dho=0.5; Таблица 1. Значения румба и начальные значения погрешностей БИИМ на ВОГ
ВНИМАНИЕ! В программе углы должны иметь размерность [рад], линейные скорости [м/c]. Поэтому в тексте IS24re_VG_StRdr_bqN_dat.m уже введены соответствующие множители для перехода (для α, β, γ: [рад]= [град] *pi/180, от погрешностей декартовых координат объекта к погрешностям широты и долготы DFio=δΔSN0 /R, DLamo=δΔSE0 /R*cosFio; I.5. Загрузить файл IS24re_VG_StRdr_bqN_dat.m в рабочую область Workspace Matlab, нажав кнопки Debug ® Run. I.6. Загрузить Simulink (для этого на панели инструментов Matlab нажать I.7. Настроить алгоритм для реализации режима начальной выставки и калибровки БИИМ на ВОГ в условиях стенда: § Подключить измерения Z_gps, Z_K (см. рис. 3, Блок 7.1, ключи №1 и №2 - “вниз”), а измерение Z_L отключить (см. рис. 3, Блок 7.1, ключ №3 “ вверх ”). § Подключить матрицу измерений H_8_24_gpsK (рис. 3, Блок 7.2, H2, ключ №4 “ вверх ”, ключ №5 “ вниз ”); I.8. В Блоке 5 (рис. 2) изменить названия всех (7-ми) file*a.mat (например, для варианта 5 (цикл I, см. табл. 1), название файла результатов, который формируется в блоке «файл №1», станет Or_VG 60 a.mat. I.9. Указать в меню настроек Simulation ® Simulation Parameters (рис. 4) значение параметра stop time равное 10800 с, а также дискретность (dt) и численный алгоритм (Euler) интегрирования.
Рис. 4.
I.10. Запустить процесс обработки массива данных, нажав кнопки Simulation®Start ( или кнопку I.11. После окончания моделирования построить с использованием программ plot_Dr.m, plot_Dn.m, plot_DMg.m и plot_Krdr.m по значениям, записанным в соответствующие file.mat, графики оценок смещений нулей гироскопов и акселерометров, погрешностей масштабных коэффициентов и коэффициентов румбовых дрейфов гироскопов. Графики необходимо внести в отчет. I.12. Значения оценок смещений нулей гироскопов (plot_Dr.m, Dr_VG_**.mat) и акселерометров (plot_Dn.m, Dn_VG_**.mat), погрешностей масштабных коэффициентов (plot_DMg.m, Mg_VG_**.mat) и коэффициентов румбовых дрейфов гироскопов (plot_Krdr.m, Krdr_VG_**.mat) занести в отчет (см. таблица 2). Таблица 2. Пример сводной таблицы результатов
I.13. Oчистить командное окно и рабочую область пакета Matlab (щелкнуть по кнопке Edit на панели Matlab, а затем в открывшемся меню использовать команды Clear Command Window, Clear Workspace); I.14. Повторить п.п. I.2…1.13 для цикла II (значение румба см. табл. 1).
ВНИМАНИЕ! Полученные результаты будут использованы в лабораторной работе №2. Содержание протокола: 1. Оценить наблюдаемость составляющих моделей погрешностей гироскопов и акселерометров и уровень ошибок их оценок (по анализу работы ковариационного канала ФК); 2. Анализ результатов работы ФК в режиме начальной выставки и калибровки БИИМ на ВОГ в условиях стенда (графики, построенные в п. I.11 - для двух циклов): - уровень смещений нулей гироскопов и акселерометров, погрешностей масштабных коэффициентов и коэффициентов румбовых дрейфов гироскопов БИИМ на ВОГ VG 951; - изменчивость их оценок на разных румбах.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 357; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.006 с.) |

 ,
, находится на «Панели задач»), в окне «Current Directory» указать путь к рабочей папке d:\student\Emlib\Prog_Lab_EP \.
находится на «Панели задач»), в окне «Current Directory» указать путь к рабочей папке d:\student\Emlib\Prog_Lab_EP \. ) и задать 3-х часовой массив данных (n = 541000).
) и задать 3-х часовой массив данных (n = 541000). )
) )
) );
); , (α, β, γ)
, (α, β, γ)
 )
)

 ). Открыть файл M_IS24re_VG_StRdr_bqN_Lit.mdl ( для этого на панели инструментов Simulink Library Browser нажать
). Открыть файл M_IS24re_VG_StRdr_bqN_Lit.mdl ( для этого на панели инструментов Simulink Library Browser нажать 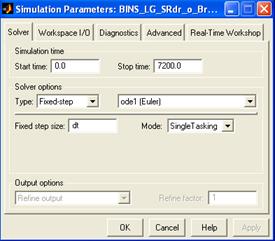
 на панели инструментов ).
на панели инструментов ).