Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
На плоскую сходящуюся систему силСодержание книги
Поиск на нашем сайте Два стержня АС и ВС соединены шарнирно в узле С, к которому через блок D подвешен груз 1 весом 12 Н (рис. 1.33). Определить реакции стержней АС, ВС, если угол a = 60о.
Решение. Решаем задачу по изложенному алгоритму. 1.Выбираем правую систему отсчёта OYZ. 2.Вырезаем узел С и рассмотрим его равновесие. Активных сил к узлу С не приложено. Следовательно, Σ F iE = 0. 3.От узла С отбрасываем невесомые стержни АС и ВС и показываем реакции R A и R B. Эти реакции направлены вдоль стержней. Условимся рассматривать их растянутыми. Отбрасываем нить и показываем на рисунке реакцию Т нити. Нить растянута. Модуль Т реакции Т равен весу G груза 1. 4.На узел С действует плоская система сходящихся реакций связей. Поскольку Σ F iE = 0, то геометрическое условие равновесия приобретает вид Σ R iE = R A + R B + T = 0. Аналитические условия равновесия выражаются двумя уравнениями: Σ Σ 5.Из уравнения (2) определим RA = – RB· RB·tg(a)·sin(a) + RB·cos(a) + T = 0. Откуда RB = – = – Так как RB < 0, то стержень ВС сжат. RA = – RB·tg(a) = – (– 6)·1,732 = 10, 392 Н. Так как RA > 0, то стержень АС растянут. Вопросы и задания для самоконтроля
1. Сформулировать определение термина «проекция силы на ось». 2. Записать формулы для определения проекций силы F на координатные оси декартовой системы отсчёта OXYZ. 3. Записать формулу для определения силы F через компоненты этой силы в декартовой системе отсчёта OXYZ. 4. Записать формулы для определения направляющих косинусов силы в декартовой системе отсчёта OXYZ. 5. Записать формулы для определения проекций равнодействующей системы сходящихся сил в декартовой системе отсчёта OXYZ. 6. Записать формулу, выражающую геометрическое условие равновесия сходящейся системы сил. 7. Записать уравнения равновесия для пространственной системы сходящихся сил в декартовой системе отсчёта OXYZ. 8. Записать уравнения равновесия для плоской системы сходящихся сил в декартовой системе отсчёта OXYZ.
Пара сил
Пару сил в механике рассматривают как одно из основных понятий, наряду с понятием силы. Пара сил – система двух параллельных, противоположно направленных и равных по модулю сил, не лежащих на одной прямой. Плоскость действия пары сил – плоскость, в которой находятся линии действия сил. Плечо пары сил – кратчайшее расстояние (длина перпендикуляра) между линиями действия сил, составляющих пару сил.
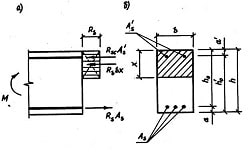
На рис. 1.34 изображена пара сил, плоскость действия которой лежит в плоскости OXY системы отсчёта OXY. Силы F 1, F 2 образуют пару сил. F1 = F2; F 1 = – F 2. Однако силы пары не уравновешиваются, так как они направлены не по одной прямой. Пара сил стремится произвести вращение тела, к которому она приложена. Действие пары сил на тело характеризуется её моментом.
Для количественной характеристики действия пары сил на тело и указания направления, в котором пара сил стремится вращать тело, вводится понятие алгебраического момента пары сил. Алгебраический момент пары сил – величина, равная взятому с соответствующим знаком произведению модуля одной из сил на её плечо.
M = ± F1·h = ± F2·h. Алгебраический момент пары сил считают положительным, если пара сил стремится повернуть тело против вращения часовой стрелки, и отрицательным, если в сторону вращения часовой стрелки. В системе СИ момент пары сил измеряется в Н·м.
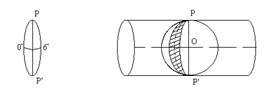
На рис. 1. 35 изображена пара сил (F 1, F 2), линии действия которых лежат в плоскости OXY. Момент пары сил – векторная мера механического действия пары сил, равная моменту одной из сил пары относительно точки приложения другой силы.
Момент пары сил изображается вектором М. Вектор момента М пары сил (F 1, F 2) направлен перпендикулярно к плоскости действия пары сил в сторону, откуда видно пару сил, стремящуюся вращать плоскость её действия в сторону, противоположную вращению часовой стрелки. Согласно определению (см. рис. 1.35), M ^ j, M ^ i, M = F1×h = F2·h. Таким образом, пара сил полностью характеризуется её моментом M.
Теорема. Пары сил, лежащие в одной плоскости, эквивалентны, если их алгебраические моменты численно равны и одинаковы по знаку.
Доказательство этой теоремы несложно и здесь оно не приводится. Следствия из теоремы: 1.Пару сил, не изменяя её действия на тело, можно как угодно поворачивать и переносить в любое место плоскости её действия. 2.У пары сил можно изменять плечо и модуль силы, сохраняя при этом алгебраический момент пары и плоскость действия.
Теорема. Пары сил в пространстве эквивалентны, если их моменты геометрически равны.
Доказательство этой теоремы также достаточно просто и здесь не приведено. Из теорем о парах сил следует вывод: не изменяя действия пары сил на тело, пару сил можно переносить в любую плоскость, параллельную плоскости её действия, а также изменять её силу и плечо, сохраняя неизменными модуль и направление её момента. Таким образом, вектор момента пары сил можно переносить в любую точку, то есть момент пары сил является свободным вектором. Вектор момента пары сил определяет три элемента: положение плоскости действия пары; направление вращения; числовое значение (модуль) момента.
Отметим аналогию: если точку приложения вектора силы можно помещать где угодно на линии действия этой силы (скользящий вектор), то векторный момент пары сил можно приложить в любой точке тела (свободный вектор).
Сложение пар сил
Векторные моменты этих пар сил обозначим М 1, М 2, М 3. Так как эти векторы свободные, то переместив их в начало системы отсчёта OXYZ, получим систему векторов, приложенных в одной точке. Сложив графически эти векторы, получим один вектор М = М 1 + М 2 + М 3. Если таких векторов много, то в общем случае имеем M = Σ M i (см. рис. 1.37).
Векторный момент пары сил, эквивалентный данной системе пар сил в пространстве, равен сумме векторных моментов заданных пар сил.
Условия равновесия пар сил
Теорема. Для равновесия пар сил, действующих на тело, необходимо и достаточно, чтобы величина векторного момента эквивалентной пары сил равнялась нулю или векторный многоугольник, построенный на векторных моментах заданных пар сил, был замкнут: M = Σ M i = 0.
В аналитической форме условия равновесия пар сил в пространстве выражаются системой уравнений: MOX = Σ MiOХ = 0; MOY = Σ MiOY = 0; MOZ = Σ MiOZ = 0, где MOX, MOY, MOZ – проекции векторного момента М эквивалентной пары сил на координатные оси OX, OY, OZ; Σ MiOХ; Σ MiOY; Σ MiOZ – суммы проекций векторных моментов M i на координатные оси. Теорема. Для равновесия пар сил, приложенных к телу, необходимо и достаточно, чтобы алгебраические суммы проекций векторных моментов пар сил на каждую координатную ось равнялись нулю.
В общем случае пару сил можно уравновесить только парой сил и нельзя уравновесить одной силой.
|
|||||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 517; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.007 с.) |


 = 0 = – RA·sin(a) + RB·cos(a) + T = 0; (1)
= 0 = – RA·sin(a) + RB·cos(a) + T = 0; (1) = 0 = RA·cos(a) + RB·sin(a) = 0. (2)
= 0 = RA·cos(a) + RB·sin(a) = 0. (2) = – RB·tg(a). При подстановке RA в уравнение (1) имеем
= – RB·tg(a). При подстановке RA в уравнение (1) имеем =
= = – 6 Н.
= – 6 Н.