
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Временные характеристики САУСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Временные характеристики САУ
Временной характеристикой системы называется закон изменения выходной величины в функции времени при изменении входного воздействия по определенному закону и при условии, что до приложения воздействия система находилась в покое. Временные характеристики определяются как реакция системы на типовые воздействия при нулевых начальных условиях. К основным временным характеристикам относятся переходная функция и функция веса. Типовые воздействия. В качестве типовых воздействий при исследовании систем используются: – единичная функция; – единичный импульс; – линейно – растущее воздействие; – квадратичное воздействие; – гармоническое воздействие. Переходная функция. Переходная функция h(t) – реакция системы на единичное воздействие при нулевых начальных условиях. Весовая функция. Весовая функция k(t) – реакция системы на единичный импульс при нулевых начальных условиях. Методы определения временных характеристик 1. Классический метод (основан на решении дифференциальных уравнений). 2. Операторный метод, использующий разложение на простые дроби. 3. Операторный метод, использующий вычеты. 4. Метод аналогового и цифрового моделирования. 5. Метод трапеций. Интегрирующее звено
Звено описывается уравнением Или в другой форме записи
Примерами интегрирующего звена являются: резервуар, наполняемый жидкостью; электродвигатель постоянного тока; гидроцилиндр с распределительным золотником, операционный усилитель в режиме интегрирования.
Переходная функция (а) и дельта-функция (б) интегрирующего звена
Апериодическое звено Звено относится к группе позиционных звеньев и описывается уравнением
Переходная функция звена найдется как решение уравнения (4.3) при x 1 = 1 и начальном условии x 2 = 0 при t = 0.
Отрезок, отсекаемый касательной к кривой, в любой точке кривой на асимптоте равен постоянной времени T. Видно, что чем больше постоянная времени звена, тем больше длится переходный процесс, то есть медленнее устанавливается статическое значение x 2 = k на выходе звена. Его частотные функции имеют следующий вид:
Колебательное звено
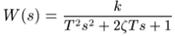
Передаточная функция колебательного звена имеет вид:
где K – коэффициент передачи; T – постоянная времени, характеризующая инерционность системы, т.е. продолжительность переходного процесса в ней. (T > 0); ξ – коэффициент (декремент) затухания, который характеризует рассеяние энергии в звене (0 < ξ < 1). Колебательное звено описывается дифференциальным уравнением второго порядка: T2·d2у(t)/dt2 + 2T ξ·dу(t)/dt + у(t) = K·х(t) Примером колебательного звена является электрический колебательный контур, груз на пружине, маятник, стрелочный прибор. Переходная характеристика колебательного звена имеет вид: h(t) = L-1[W(s)/s)] = L-1[K/[s·(T2s2 + 2T ξs +1)]]
Точность САУ
Различают точность, рассматриваемую в переходном процессе - динамическая точность, и точность в установившемся режиме - статическая точность.
Общий способ повышения точности (в статическом и динамическом режимах) – обеспечение следующих оценок: Wзс(p) = W(p)/(1+W(p)» 1 - Мера точности воспроизведения задающего воздействия в замкнутой системе. Wс(p) = 1/(1+W(p)» 0 - Мера малости ошибки слежения Статическая точность в следящей системе определяется при гармоническом входном воздействии с использованием передаточной функции по ошибке. e(p) = Wc(p) Uзад(p), Wc(p) = 1/(1+W(p)). Один из основных способов повышения точности - увеличение коэффициента k разомкнутой системы. Однако это не значит, что можно таким образом достичь любой желаемой точности. При чрезмерном увеличении k возможна потеря устойчивости замкнутой системы. Повышение точности всегда приводит к уменьшению запаса устойчивости по амплитуде. Динамическая точность относится к более сложным задачам анализа систем, т.к. требует изучения всего переходного процесса. Для повышения динамической точности системы обычно используется принцип комбинированного управления по задающему воздействию (принцип инвариантности).
Временные характеристики САУ
Временной характеристикой системы называется закон изменения выходной величины в функции времени при изменении входного воздействия по определенному закону и при условии, что до приложения воздействия система находилась в покое. Временные характеристики определяются как реакция системы на типовые воздействия при нулевых начальных условиях. К основным временным характеристикам относятся переходная функция и функция веса. Типовые воздействия. В качестве типовых воздействий при исследовании систем используются: – единичная функция; – единичный импульс; – линейно – растущее воздействие; – квадратичное воздействие; – гармоническое воздействие. Переходная функция. Переходная функция h(t) – реакция системы на единичное воздействие при нулевых начальных условиях. Весовая функция. Весовая функция k(t) – реакция системы на единичный импульс при нулевых начальных условиях. Методы определения временных характеристик 1. Классический метод (основан на решении дифференциальных уравнений). 2. Операторный метод, использующий разложение на простые дроби. 3. Операторный метод, использующий вычеты. 4. Метод аналогового и цифрового моделирования. 5. Метод трапеций. Интегрирующее звено
Звено описывается уравнением Или в другой форме записи
Примерами интегрирующего звена являются: резервуар, наполняемый жидкостью; электродвигатель постоянного тока; гидроцилиндр с распределительным золотником, операционный усилитель в режиме интегрирования.
Переходная функция (а) и дельта-функция (б) интегрирующего звена
Апериодическое звено Звено относится к группе позиционных звеньев и описывается уравнением
Переходная функция звена найдется как решение уравнения (4.3) при x 1 = 1 и начальном условии x 2 = 0 при t = 0.
Отрезок, отсекаемый касательной к кривой, в любой точке кривой на асимптоте равен постоянной времени T. Видно, что чем больше постоянная времени звена, тем больше длится переходный процесс, то есть медленнее устанавливается статическое значение x 2 = k на выходе звена. Его частотные функции имеют следующий вид:
Колебательное звено
Передаточная функция колебательного звена имеет вид:
где K – коэффициент передачи; T – постоянная времени, характеризующая инерционность системы, т.е. продолжительность переходного процесса в ней. (T > 0); ξ – коэффициент (декремент) затухания, который характеризует рассеяние энергии в звене (0 < ξ < 1). Колебательное звено описывается дифференциальным уравнением второго порядка: T2·d2у(t)/dt2 + 2T ξ·dу(t)/dt + у(t) = K·х(t) Примером колебательного звена является электрический колебательный контур, груз на пружине, маятник, стрелочный прибор. Переходная характеристика колебательного звена имеет вид: h(t) = L-1[W(s)/s)] = L-1[K/[s·(T2s2 + 2T ξs +1)]]
|
||
|
|
Последнее изменение этой страницы: 2016-08-06; просмотров: 2384; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.60 (0.008 с.) |

 .
. , откуда и получилось название звена. В идеальном интегрирующем звене выходная величина пропорциональна интегралу по времени от входной или скорость изменения выходной величины пропорциональна входной величине звена.
, откуда и получилось название звена. В идеальном интегрирующем звене выходная величина пропорциональна интегралу по времени от входной или скорость изменения выходной величины пропорциональна входной величине звена. Передаточная функция звена
Передаточная функция звена  . Его частотные и временные функции имеют следующий вид:
. Его частотные и временные функции имеют следующий вид: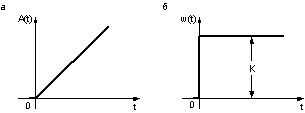
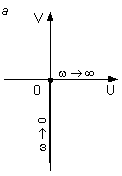 Амплитудно-фазовая характеристика для положительных частот сливается с отрицательной частью оси мнимых.
Амплитудно-фазовая характеристика для положительных частот сливается с отрицательной частью оси мнимых.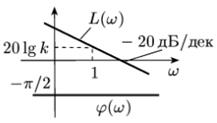 Построение ЛАХ выполняется по выражению
Построение ЛАХ выполняется по выражению  . Нетрудно видеть, что ЛАХ представляет собой прямую с отрицательным наклоном 20 дБ/дек, пересекающую ось нуля децибел при частоте среза w ср = k. ЛФХ представляет собой прямую y = – 90°, параллельную оси частот.
. Нетрудно видеть, что ЛАХ представляет собой прямую с отрицательным наклоном 20 дБ/дек, пересекающую ось нуля децибел при частоте среза w ср = k. ЛФХ представляет собой прямую y = – 90°, параллельную оси частот. (4.3).Передаточная функция этого звена
(4.3).Передаточная функция этого звена  .
. Одним из примеров апериодического звена является RL –цепь, где входной величиной является напряжение U 1, поступающее на цепь, а в качестве выходной величины может рассматриваться ток или напряжение U 2 на сопротивлении R.
Одним из примеров апериодического звена является RL –цепь, где входной величиной является напряжение U 1, поступающее на цепь, а в качестве выходной величины может рассматриваться ток или напряжение U 2 на сопротивлении R.
 АФЧХ для положительных частот имеет вид полуокружности с диаметром, равным коэффициенту передачи звена k. Величина постоянной времени звена Т определяет распределение отметок w вдоль кривой.
АФЧХ для положительных частот имеет вид полуокружности с диаметром, равным коэффициенту передачи звена k. Величина постоянной времени звена Т определяет распределение отметок w вдоль кривой. ЛАХ, ЛФХ:
ЛАХ, ЛФХ: 



 Принципиальное отличие ЛАХ колебательного звена от ЛАХ инерционных звеньев состоит в том, что в районе сопрягающей частоты ωс = 1/T имеется максимум (так называемый "горб"), из-за чего поведение асимптотической ЛАХ в этой области может существенно отличаться от истинной. Это явление называется резонансом.
Принципиальное отличие ЛАХ колебательного звена от ЛАХ инерционных звеньев состоит в том, что в районе сопрягающей частоты ωс = 1/T имеется максимум (так называемый "горб"), из-за чего поведение асимптотической ЛАХ в этой области может существенно отличаться от истинной. Это явление называется резонансом. Проще всего рассмотреть понятие точности на примере следящей системы. Для этого наилучшим образом применима передаточная функция по ошибке, позволяющая записать сигнал ошибки при любом виде задающего воздействия: e(p) = We(p) Uзад(p) + Wef(p) f(p).
Проще всего рассмотреть понятие точности на примере следящей системы. Для этого наилучшим образом применима передаточная функция по ошибке, позволяющая записать сигнал ошибки при любом виде задающего воздействия: e(p) = We(p) Uзад(p) + Wef(p) f(p). Добавим в стандартную структуру системы дополнительную передаточную функцию Y(p)» 1/(W(p)Woc(p)) так, чтобы сигнал ошибки вообще не зависел от задающего воздействия. Это можно выполнить введением в систему дополнительной ветви прохождения сигнала, и подобрать коэффициент передачи в этой ветви так, чтобы компенсировать нежелательный сигнал.
Добавим в стандартную структуру системы дополнительную передаточную функцию Y(p)» 1/(W(p)Woc(p)) так, чтобы сигнал ошибки вообще не зависел от задающего воздействия. Это можно выполнить введением в систему дополнительной ветви прохождения сигнала, и подобрать коэффициент передачи в этой ветви так, чтобы компенсировать нежелательный сигнал.


