Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поляризовані, магнітоелектричні, електродинамічні й індукційні системи.Содержание книги
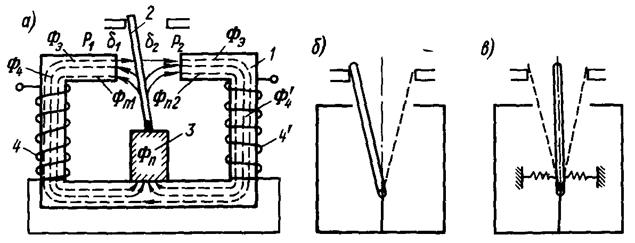
Поиск на нашем сайте Поляризаційні механізми. Поляризовані електромагнітні системи відрізняються від розглянутих вище наявністю двох не залежних один від одного магнітних потоків: постійного, що не залежить від стану схеми, у яку включений механізм, і змінного, залежного від стану схеми, у яку включений механізм. Перший, поляризуючий, потік Фп створюється або постійним магнітом (мал. 6.7), або електромагнітом з незалежним живленням. Другий, робітник, потік Фэ створюється електромагнітом. Значення і напрямок робочого потоку залежать від стану схеми, у яку включений механізм.
Рис. 6.7. Принцип пристрою поляризованої магнітної системи
Принцип дії. Утворений магнітом 3 поляризуючий потік Фп, пройшовши через якір 2, розгалужується. Одна його частина Фп1 проходить через зазор d1 і ліву частину сердечника 1. Друга його частина Фп2 проходить через зазор d 2 і праву частину сердечника. Котушками 4 і 4', розміщеними на сердечниках і підключеними, створюється робочий потік. Основна його частина Фэ замикається через весь повітряний простір d1+d2 і сердечник, охоплюючи обидві котушки. Менші частини цього потоку Ф4 і Ф¢4 замикаються через якір, що відповідають повітряному зазору і частині сердечника, охоплюючи тільки одну котушку. При наявності тільки одного поляризуючого потоку якір відхилиться до одного з полюсів магніту, тому що зі зменшенням зазору (у нашому прикладі d1) частина поляризующего потоку в цьому зазорі збільшиться за рахунок зменшення його частки в іншому зазорі. З появою робочого потоку в одному з зазорів будемо мати різницю потоків, а в іншому - суму. У нашому прикладі в зазорі d1 - потік Фп1 - Фэ - Ф4, у зазорі d2 - потік Фп2 + Фэ + Ф4. В міру збільшення робочого потоку потік у зазорі d1 буде усе зменшуватися, а в зазорі d2 - збільшуватися. При якомусь співвідношенні потоків якір перекинеться на праву сторону, тобто система спрацює. Для повернення системи у вихідне положення потрібно змінити полярність струму (а отже, і потоку) у робочих котушках. Можна настроїти систему так, що якір повернеться у вихідне положення при зниженні робочого потоку і збереженні його полярності. Для цього необхідно, щоб, перекинувшись вправо, якір не переходив через нейтральне положення (мал. 6.7,6), тобто щоб при будь-якім положенні якоря той самий повітряний зазор залишався менше іншого (наприклад, d1 < d2). Таке настроювання називається настроюванням на перевагу. У магнітній системі (мал. 6.7, в) якір у залежності від полярності струму в робочій котушці може відхилятися в ту чи іншу сторону. При знеструмленій котушці якір повернеться в нейтральне положення. Розрахунок тягових сил. Вважаємо, що індукція розподілена в зазорах рівномірно, і розрахунок будемо вести, використовуючи формулу Максвелла. Сили, що діють на якір у зазорах d1 і d2 від усіх потоків, позначимо відповідно P1 і Р2. При наявності тільки поляризующего потоку
Сумарна сила, що діє на якір,
З огляду на, що Фп1 + Фп2 = Фп, можемо написати
Тоді
тобто сумарна сила, що діє на якір, пропорційна зсуву якоря від нейтрального положення [(d 2 - d 1/2 - зсув] і залежить від потоку постійного магніту. При наявності робочого потоку
Потоками Ф4 і Ф ’ 4 можемо зневажити, тому що постійний магніт має для них великий опір і вони малі в порівнянні з іншими потоками. Тоді
Нас цікавить значення потоку Фэ, при якому якір почне переміщуватися. Це буде за умови, коли Р1 = Р2, тобто
відкіля
Якщо зневажити втратами в сталі сердечника і потоками розсіювання, то мінімальна МДС Fmin, при якій якір прийде в рух, буде
Підставляючи значення Фп1 і Фп2 згідно (6.24), одержимо
тобто мінімальна МДС робочих котушок, необхідна для спрацьовування системи, пропорційна поляризуючому потоку і зсуву якоря від нейтрального положення. Форми магнітних систем. По джерелу МДС поляризуючого поля чи розрізняють системи з постійним магнітом і системи з електромагнітом, що живлетьсяся від незалежного джерела. По конструкції розрізняють системи з послідовним магнітним ланцюгом, з рівнобіжної, чи диференціальним, магнітним ланцюгом і з мостовим магнітним ланцюгом. У мостовому магнітному ланцюзі якір залишається в нейтральному положенні при відсутності струму в робочих обмотках. Область застосування. Поляризовані системи знаходять широке застосування в установках проводовий зв'язку, а також у пристроях електросилової автоматики, релейного захисту, у системах, що стежать, системах телекерування, залізничної сигналізації і блокування. Особливостями цих систем є спрямованість дії, висока чутливість, велика кратність термічної стійкості, швидкодія.
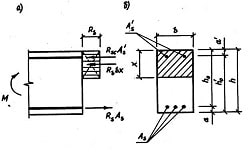
Магнітоелектричні системи. Магнітоелектричні системи засновані на використанні сил взаємодії магнітного поля постійного магніту і струму в рухливій котушці чи рамці. Системи можуть виконуватися з обертальним (мал. 6.8,а, б) і з поступальним (мал. 6.8,а) рухом рамки. Сила, що діє на кожну зі сторін рамки в обох випадках, визначається за законом
Рис. 6.8. Принцип пристрою магнітоелектричних систем реле з обертальним (а, б) і поступальним (в) рухом рамки. 1 - постійний магніт; 2 - рамка з обмоткою; 3 - магнитопровод, 4 - рухливий контакт; 5 - нерухомі контакти; 6 - поворотні пружини.
Загальна сила, що діє на рамку при поступальному її русі,
Обертаючий момент
де Вd - індукція, створювана постійним магнітом у повітряному зазорі; Iр - струм у котушці (рамці); w - число витків котушки; lp - робоча довжина котушки (та частина, що знаходиться в магнітному полі); r - радіус котушки; K1 і k2 - коефіцієнти, обумовлені постійними параметрами системи. Особливостями магнітоелектричних систем є спрямованість дії (при зміні напрямку струму в котушці міняється напрямок сили і моменту) і висока чутливість (магнітоелектричні системи реле можуть бути побудовані на потужність 10-8 – 10-10 Вт). Недоліком є те, що магнітоелектричні системи придатні тільки для постійного струму.
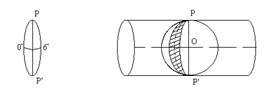
Електродинамічні системи. Переміщення якоря (рамки) 2 тут здійснюється за рахунок сил взаємодії струму в одному контурі Iр (мал. 6.9) з магнітним полем, створюваним струмами в інших контурах I1 (3). Системи за принципом роботи аналогічні магнітоелектричним. Вони можуть виконуватися з обертальним чи поступальним рухом рамки (якоря). На відміну від магнітоелектричних електродинамічні системи придатні для роботи, як на постійному, так і на змінному струмі.
Рис. 6.9. Принцип пристрою електродинамічних систем: а - система з обертальним рухом рамки; б - система з поступальним рухом; в - система без сталі.
Вони можуть виконуватися зі сталлю 1 і без сталі, що дозволяє застосовувати їх при підвищеній частоті. Конструктивні форми електродинамічних систем дуже різноманітні. Сила, що діє на кожну зі сторін рамки, визначиться тут тим же законом (6.32):
де Вd1 -індукція в повітряному зазорі, створювана струмом I1, рівна
тут Rm - опір магнітного ланцюга. Якщо знехтувати магнітним опором сталі, то
Таким чином,
Сила, що діє на рамку при поступальному її русі,
a обертаючий момент
де k1 і k2 - коефіцієнти, обумовлені постійними параметрами системи. При змінному струмі
середній обертаючий момент
де j - кут зрушення між струмами I1 і Ip. Індукційні системи. Якщо в змінне магнітне поле, створюване електромагнітною системою 1 (мал. 6.10), помістити струмопровідний контур 2 (диск, барабан), то в контурі буде наведенаі ЕРС трансформації Е и в контурі з'явиться струм Iтр.
Рис. 6.10. Принцип роботи індукційної системи
Взаємодія цього струму з потоком, що його збудив, приведе до появи сили (розташованої в площині диска й обумовленої за правилом лівої руки), перпендикулярної потоку і струму і, що приводить у рух контур (диск). На цьому принципі і засновані індукційні механізми, тобто рушійна сила (момент) в індукційному механізмі виходить у результаті взаємодії змінного струму, індукованого в якомусь провіднику, з змінним потоком, що індукував цей струм. Якщо потік міняється синусоидально:
те
де с - коефіцієнт пропорційності, що залежить від довжини l провідника зі струмом, площі потоку й обраної системи одиниць, а y - кут зрушення між струмом I і потоком Ф. Тому що струм і потік міняються в часі, то і напрямок і значення сили будуть мінятися в часі. Нас цікавить середнє значення сили за один період, під дією якої система, що володіє значним моментом інерції, прийде в рух:
Рис 6.11. Струми трансформації (а) і струми різання (б)
Якщо індуктивність провідника (диска) мала, то струм у провіднику дуже мало зсунутий стосовно ЕРС, а отже, кут y близький до 90°. Середня сила при цьому дуже мала і прагне до нуля. Тому в електродинамічних системах створюють кілька змінних потоків зсунутих в часі і просторі відносно один одного. Виходить що поле як би біжить на зразок поля в короткозамкнутих асинхронних двигунах. При цьому кут y істотно відрізняється від 900 і рушійна сила Рcр виходить потрібного значення. Як тільки почнеться рух рухливої системи (диска), у ній індукується новий струм Iрез, названий струмом різання, обумовлений рухом провідника в магнітному полі. Схема струмів трансформації Iтр і струмів різання Iрез під полюсом показана на мал. 6.11. Струми різання, взаємодіючи з магнітним полем, будуть створювати гальмове зусилля, обумовлене за правилом правої руки. Значення гальмового зусилля
де Вт, - амплітудне значення індукції; l - розмір полюса в напрямку, перпендикулярному руху рухливої системи (тобто довжина лінії струму під полюсом); R - опір струму в рухливій системі; v - швидкість руху рухливої системи, її можна вважати практично постійною. Таким чином, в індукційній системі рух рухливої частини відбувається під дією різниці двох сил - сили рушійної і сили гальмуючої. За принципом роботи індукційні системи придатні тільки для змінного струму.
|
||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 467; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.86 (0.006 с.) |

 ;
;  . (6.22)
. (6.22) . (6.23)
. (6.23)
 (6.24)
(6.24) , (6.25)
, (6.25) ,
,  . (6.26)
. (6.26) ,
,  . (6.27)
. (6.27) (6.28)
(6.28) (6.29)
(6.29) . (6.30)
. (6.30) , (6.31)
, (6.31) . (6.32)
. (6.32)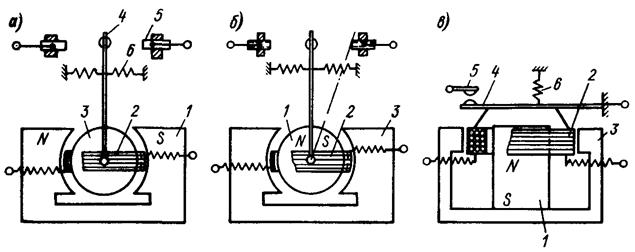
 . (6.33)
. (6.33) , (6.34)
, (6.34)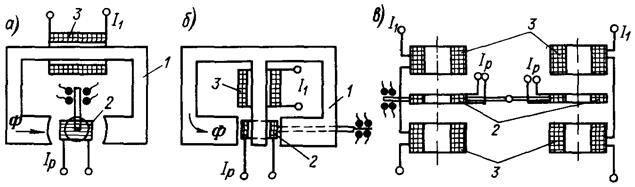
 ,
, , (6.35)
, (6.35) . (6.36)
. (6.36) . (6.37)
. (6.37) , (6.38)
, (6.38) , (6.39)
, (6.39) ,
,  ,
, , (6.40)
, (6.40)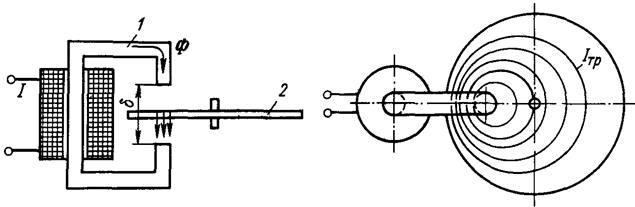
 , (6.41)
, (6.41) і миттєва сила
і миттєва сила , (6.42)
, (6.42) . (6.43)
. (6.43)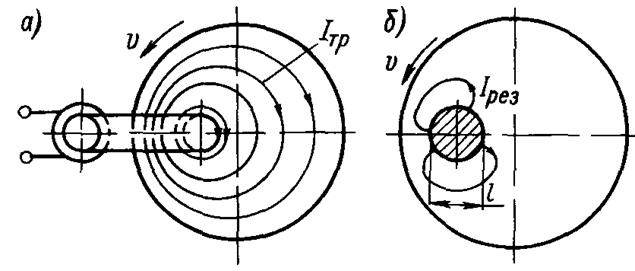
 , (6.44)
, (6.44)