Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
к выполнению расчетно-графического задания "Анализ и параметрический синтез планетарных коробок передач с двумя степенями свободы" по курсу «Синтез планетарных передач»
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ, УКРАИНЫ
НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ «ХАРЬКОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ»
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению расчетно-графического задания "Анализ и параметрический синтез планетарных коробок передач с двумя степенями свободы" по курсу «Синтез планетарных передач» для студентов специальности
Утверждено редакционно-издательским советом университета, протокол №__ от __.___.15
Харьков НТУ «ХПИ» 2015 СОДЕРЖАНИЕ
ВВЕДЕНИЕ……………………………………………3
Постановка задачи…………………………………….4
Исходные данные……………………………………..5
Порядок выполнения задания………………………..6
1. Расчет внутренних передаточных отношений всех планетарных рядов………………………….6
2. Подбор чисел зубьев на всех шестернях……..9
3. Расчет скоростей вращения всех звеньев…...11
4. Определение моментов на всех центральных звеньях без учета КПД и с его учетом………....14
5. Определение модуля зацепления и ширины венцов шестерен планетарных рядов…………..24
6. Определение диаметров осей сателлитов всех планетарных рядов, входного и выходного валов………………………………………………...39
7. Определение типов и размеров подшипников сателлитов всех планетарных рядов……………42
8. Определение числа пар трения для всех управляющих элементов…………………...………….48
СПИСОК ЛИТЕРАТУРЫ……………………...……50
ВВЕДЕНИЕ
Учебный курс "Синтез планетарных передач" посвящен изучению теоретических основ анализа и синтеза планетарных и дифференциальных механизмов, конструированию основных деталей и узлов планетарных коробок передач. Целью изучения курса является предоставление студентам знаний по основам конструирования и расчета планетарных передач и дифференциальных механизмов, которые применяются в гусеничных и колесных машинах. В рамках выполнения курсовой работы "Анализ и параметрический синтез планетарных коробок передач с двумя степенями свободы" студент должен освоить алгоритмы геометрического, кинематического и силового анализа планетарных передач, научиться проводить параметрический синтез планетарных коробок передач, проводить их прочностной расчет и определять основные размеры.
ПОСТАНОВКА ЗАДАЧИ Для предложенной структурной схемы ПКП и заданных передаточных чисел: 1) рассчитать внутренние передаточные отношения всех планетарных рядов k1, k2 и k3, с учетом допускаемых значений 2) подобрать числа зубьев на всех шестернях, исходя из требования размещения на всех рядах максимально возможного по условию соседства количества сателлитов; 3) рассчитать скорости вращения всех звеньев, исходя из скорости вращения ведущего звена 100 с-1; 4) рассчитать моменты на всех центральных звеньях, исходя из момента на ведущем звене 1000 Нм без учета КПД и с его учетом; 5) определить модули зацепления и ширины венцов планетарных рядов из условия контактной и изгибной прочности и усталости при действии максимальной нагрузки для коэффициента динамичности 2 и стали 20Х2Н4А (термообработка цементация с последующей закалкой), времени работы по 5000 часов на каждой передаче; 6) определить диаметры входного и выходного валов, осей сателлитов всех планетарных рядов; 7) определить тип и размеры подшипников сателлитов всех планетарных рядов; 8) определить число пар трения для всех управляющих элементов; 9) начертить эскиз ПКП в масштабе, исходя из размещения основной проекции на листе формата А2 на бумаге или в Компасе.
ИСХОДНЫЕ ДАННЫЕ
Курсовая работа предполагает параметрический синтез и анализ двух коробок передач с двумя степенями свободы. Структурные схемы двухрядных планетарных коробок передач приведены в приложении А. Таблица, содержащая номера вариантов и соответствующие им наборы передаточных отношений для двухрядных коробок, приведена в приложении Б. В нашем случае рассмотрена схема № 36 (вариант 12): структурная схема (рис. 1) и передаточные числа i1= 1; i2= 0,75; i3= 0,5.
ПОРЯДОК ВЫПОЛНЕНИЯ ЗАДАНИЯ
1. Расчет внутренних передаточных отношений всех 1.1. Нумеруем в произвольном порядке планетарные ряды и управляющие элементы. При обозначении первая цифра в индексе соответствует номеру звена (1 – солнечная шестерня; 2 – эпициклическая шестерня; 3 – водило; 4 – сателлит), а вторая – номеру ряда. В соответствии с принятой нумерацией обозначаем угловые скорости всех звеньев (рис. 2).
1.2. Записываем уравнения Виллиса для всех планетарных рядов, сводим их в систему:
1.3. Находим в схеме тормоз, при включении которого под нагрузкой работает только один планетарный ряд, и записываем для этой передачи выражение передаточного отношения. (Если такой ряд найти невозможно, то для решения поставленной задачи необходимо руководствоваться п. 1.7).
Переходим от угловых скоростей к передаточным отношениям, для чего почленно делим полученное выражение на
Пробуем подставлять в качестве
Если в результате подстановки получились значения k2, не попадающие в разрешенный диапазон, то их отбраковываем. Для дальнейшего рассмотрения оставляем
1.4. Находим в схеме тормоз, при включении которого под нагрузкой работают ряд, рассмотренный в п.1.3, и еще один планетарный ряд, и записываем для этой передачи выражение передаточного отношения.
Переходим от угловых скоростей к передаточным отношениям и выражаем внутреннее передаточное отношение первого планетарного ряда через заданное общее передаточное отношение и рассчитанное внутреннее передаточное отношение второго планетарного ряда:
Пробуем подставлять в полученную формулу оставленные для дальнейшего рассмотрения в п.1.3. Так при подстановке
B результате подстановки получились значение k1= 1.5. В итоге принимаем внутренние передаточные отношения планетарных рядов:
2. Подбор чисел зубьев на всех шестернях
2.1. Определение количества сателлитов на каждом планетарном ряду. (Требование максимально возможного из условия соседства количества сателлитов предъявляется исключительно с учебной целью и на практике применяется редко.) Принимаем минимально возможное количество зубьев на шестернях Записываем условие соседства при обеспечении гарантированного зазора между зубьями соседних сателлитов, равного 2 модулям зацепления:
Делим числитель и знаменатель правой части на
для первого планетарного ряда: для второго планетарного ряда: Начиная с
Таблица 1
0,86603 0,70711 0,58779 0,5 0,43388 0,38268
Принимаем максимально возможное количество сателлитов для – первого планетарного ряда – второго планетарного ряда
2.2. Определив количество сателлитов для каждого планетарного ряда, с использованием условий соосности и сборки подберем числа зубьев на шестернях всех планетарных рядов.
Для первого планетарного ряда:
7,5
Для второго планетарного ряда:
3. Расчет скоростей вращения всех звеньев
3.1. Запишем систему уравнений (1.3) для включенной первой передачи
Угловые скорости сателлитов. Расчет угловых скоростей сателлитов производится раздельно по зависимостям для планетарных рядов с Для Аналогично (1.3), можно записать
где Соответственно
Для Из (3.2)
В нашем случае в соответствии с (3.3) на первой передаче получим:
3.2. Запишем систему уравнений (1.3) для включенной второй передачи
Угловые скорости сателлитов:
3.3. Делаем проверку: Проверка прошла успешно.
4. Определение моментов на всех центральных звеньях без учета КПД и с его учетом
Введем обозначения моментов на всех звеньях (рис. 4).
4.1. Определение моментов на всех звеньях без учета потерь. Запишем систему уравнений, описывающую равновесие всех звеньев системы:
4.1.1. Запишем систему уравнений для включенной первой передачи
Из уравнения (2)
Решая полученную систему уравнений, получаем:
4.1.2. Запишем систему уравнений для включенной второй передачи Из уравнения (6) следует, что
4.1.3. Запишем систему уравнений для включенной третьей передачи Ф – включен.
4.2. Для определения направления потоков мощности на звеньях сведем в таблицу полученные значения моментов, соответствующих им угловых скоростей и знаков мощностей, проходящих через эти звенья и полученных как произведение соответствующего момента и угловой скорости. Причем, если в описанном произведении крутящий момент равен нолю, то знак мощности не определяется, и она считается равной нулю. А если нулю равна угловая скорость, но крутящий момент нулю не равен, то знак мощности на звене считается положительным. То есть мощность из звена уходит на включенный тормоз. В общем случае, если знак мощности положительный, то мощность считается выходящей из звена, если отрицательный – входящей в звено.
Первая передача:
Мвх М11 М21 М31 М12 М22 М32 МТ1 МТ2 МФ1 МФ2 Мвых -167,67 -333,33 166,67 -666,67 -500 -500
-200 -200 -200 Nвх N11 N21 N31 N12 N22 N32 NТ1 NТ2 NФ1 NФ2 Nвых
-33333
-33333
-66667
-100000
Вторая передача:
Мвх М11 М21 М31 М12 М22 М32 МТ1 МТ2 МФ1 МФ2 Мвых -1000 -250 -750
66,67 133,34 66,67 66,67 133,34 Nвх N11 N21 N31 N12 N22 N32 NТ1 NТ2 NФ1 NФ2 Nвых -100000 -100000 Третья передача:
Мвх М11 М21 М31 М12 М22 М32 МТ1 МТ2 МФ1 МФ2 Мвых -333,33 -666,67 333,33 -1333,33 -1000 -1000
Nвх N11 N21 N31 N12 N22 N32 NТ1 NТ2 NФ1 NФ2 Nвых -33333 -66667 -133333 -100000 -100000
4.3. Определение моментов на всех звеньях с учетом потерь. Для нахождения моментов на всех звеньях с учетом потерь необходимо записать те же системы уравнений, что решались в п.4.1., выдерживая следующее правило: – все уравнения, кроме характеристических, записываются без изменений; – в характеристических уравнениях планетарных рядов перед слагаемыми, описывающими моменты на солнечной шестерне и эпицикле, вставляем в качестве сомножителей значения КПД соответственно для наружного или внутреннего зацепления. При этом если на соответствующее звено мощность входит извне, то на соответствующий КПД умножаем, если из звена мощность выходит – на соответствующий КПД делим; – в характеристических уравнениях планетарных рядов перед слагаемыми, описывающими моменты на солнечной шестерне и эпицикле, моменты на которых при решении задачи без учета потерь были равны нолю, оставляем без изменений. При решении системы уравнений принимаем КПД наружного зацепления 4.3.1. Запишем систему уравнений для включенной первой передачи
Аналогично п. 4.1.1 запишем оставшуюся систему уравнений:
4.3.2. Запишем систему уравнений для включенной второй передачи
Подведем итоги подсчётов с учетом КПД для первой и второй передач (третья осталась без изменений) .
Первая передача:
Мвх М11 М21 М31 М12 М22 М32 МТ1 МТ2 МФ1 МФ2 Мвых -167,218 -344,709 511,893 167,218 486,706 -655,496 -511,893 -486,706
-200 -200 -200 Nвх N11 N21 N31 N12 N22 N32 NТ1 NТ2 NФ1 NФ2 Nвых 33443,6
-34470,9
-33443,6
97341,2
-65549,6
-97341,2
Вторая передача:
Мвх М11 М21 М31 М12 М22 М32 МТ1 МТ2 МФ1 МФ2 Мвых 245,038 742,615 -1000 -245,038 -742,615
66,67 133,34 66,67 66,67 133,34 Nвх N11 N21 N31 N12 N22 N32 NТ1 NТ2 NФ1 NФ2 Nвых 99020,28 -100000 -99020,28
5. Определение модуля зацепления и ширины венцов
При решении поставленной задачи для каждого планетарного ряда рассматривается зацепление солнечная шестерня – сателлит по методике, приведенной в [1] (глава 3).
5.1. Прочностной расчет первого планетарного ряда. 5.1.1. Определение режимов работы и расчетных нагрузок для 1 планетарного ряда. Из подраздела 4.3 выписываем длительно действующие крутящие моменты на солнечной шестерне 1 ряда с учетом потерь, а из раздела 3 – угловые скорости солнечной шестерни и водила 1 ряда. Далее определяем относительную скорость вращения солнечной шестерни при остановленном водиле
где Доля крутящего момента на солнечной шестерне, приходящаяся на зацепление солнечной шестерни с одним сателлитом с учетом коэффициента неравномерности распределения нагрузки между сателлитами
№ передачи I II III М11, Нм -167,218 -333,33 w11, с-1 -200 w31, с-1 66,67
66,67 N1j, млн. 2886,2 955,5
45,15
Принимаем в качестве расчетного крутящего момента больший из
5.1.2. Определение допускаемых напряжений для расчета на контактную В соответствии с (3.33) и (3.34) [1]
где
Здесь эквивалентное число циклов перемен напряжений было определено по формуле (3.37) [1]
В итоге допускаемые напряжения для расчета на контактную выносливость составляют В соответствии с (3.51) и (3.52) [1]
Здесь
С учетом ограничений для коэффициента долговечности принимаем
В итоге допускаемые напряжения для расчета на изгибную выносливость составляют
5.1.3. Расчет зацепления солнечная шестерня – сателлит первого планетарного ряда на контактную выносливость. В соответствии с формулой (3.16') [1]
где
В нашем случае
В итоге минимальный диаметр солнечной шестерни первого планетарного ряда должен быть
5.1.4. Расчет зацепления солнечная шестерня – сателлит первого планетарного ряда на изгибную выносливость. В соответствии с формулой (3.18') [1]
и ориентировочного смещения В итоге минимальный модуль зацепления для солнечной шестерни первого планетарного ряда должен быть
Принимаем для дальнейших расчетов по первому планетарному ряду
5.1.5. Проверка зацепления солнечная шестерня – сателлит первого планетарного ряда на действие максимальных нагрузок. Для проверки на действие максимальных нагрузок вначале необходимо пересчитать действительные значения длительно действующих контактных (3.15) [1] и изгибных (3.17) [1] напряжений с учетом увеличения диаметра в связи необходимостью принимать стандартное значение модуля. Контактные напряжения.
где по (3.30) [1]
Величина контактных напряжений в зацеплении солнце – сателлит при , действии максимальных нагрузок определяется по формуле (3.60) [1]:
Проверяем выполнение условия
Изгибные напряжения.
Здесь
Величина изгибных напряжений в зацеплении солнце – сателлит при, действии максимальных нагрузок определяется по формуле (3.61) [1]:
Допускаемые изгибные напряжения при действии максимальных нагрузок вычисляются по формуле (3.61) [1]: где
Проверяем выполнение условия
5.2. Прочностной расчет второго планетарного ряда. 5.2.1. Определение режимов работы и расчетных нагрузок для 2 планетарного ряда. Из подраздела 4.3 выписываем длительно действующие крутящие моменты на солнечной шестерне 2 ряда с учетом потерь, а из раздела 3 – угловые скорости солнечной шестерни и водила 2 ряда. Далее определяем относительную скорость вращения солнечной шестерни при остановленном водиле
где Доля крутящего момента на солнечной шестерне, приходящаяся на зацепление солнечной шестерни с одним сателлитом с учетом коэффициента неравномерности распределения нагрузки между сателлитами
№ передачи I II III М12, Нм 167,218 245,038 333,33 w12, с-1 -200 w32, с-1
N2j, млн. 3439,5 1146,5
54,35 79,64 108,33
Принимаем в качестве расчетного крутящего момента больший из
5.2.2. Определение допускаемых напряжений для расчета на контактную В соответствии с (3.33) и (3.34) [1]
Здесь эквивалентное число циклов перемен напряжений было определено по формуле (3.37) [1]
В итоге допускаемые напряжения для расчета на контактную выносливость составляют В соответствии с (3.51) и (3.52) [1]
Здесь
С учетом ограничений для коэффициента долговечности принимаем
В итоге допускаемые напряжения для расчета на изгибную выносливость составляют
5.2.3. Расчет зацепления солнечная шестерня – сателлит второго планетарного ряда на контактную выносливость. В соответствии с формулой (3.16') [1]
В итоге минимальный диаметр солнечной шестерни второго планетарного ряда должен быть
5.2.4. Расчет зацепления солнечная шестерня – сателлит второго планетарного ряда на изгибную выносливость. В соответствии с формулой (3.18') [1]
и ориентировочного смещения В итоге минимальный модуль зацепления для солнечной шестерни второго планетарного ряда должен быть
Принимаем для дальнейших расчетов по второму планетарному ряду
5.2.5. Проверка зацепления солнечная шестерня – сателлит второго планетарного ряда на действие максимальных нагрузок. Для проверки на действие максимальных нагрузок вначале необходимо пересчитать действительные значения длительно действующих контактных (3.15) [1] и изгибных (3.17) [1] напряжений с учетом изменения диаметра и ширины венца в связи необходимостью принимать стандартное значение модуля. Контактные напряжения.
по (3.30) [1]
Величина контактных напряжений в зацеплении солнце – сателлит при действии максимальных нагрузок определяется по формуле (3.60) [1]:
Проверяем выполнение условия
Изгибные напряжения.
Здесь
Величина изгибных напряжений в зацеплении солнце – сателлит при действии максимальных нагрузок определяется по формуле (3.61) [1]:
Допускаемые изгибные напряжения при действии максимальных нагрузок вычисляются по формуле (3.61) [1]: где
Проверяем выполнение условия
6. Определение диаметров осей сателлитов всех планетарных рядов, входного и выходного валов
6.1. Определение диаметров входного и выходного валов. Диаметры входного и выходного валов рассчитываем на режиме максимального крутящего момента с учетом коэффициента динамичности по упрощенной формуле, исходя из условия изготовления этих валов из той же стали, что и зубчатых колес – 20Х2Н4А (термообработка цементация с последующей закалкой).
Для обоих валов по [3] принимаем Для входного момента
Для выходного вала больший из моментов из расчетов по п.4.3.1. составляет
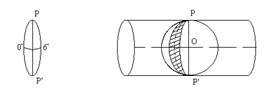
6.2. Определение диаметров осей сателлитов всех планетарных рядов. Минимальные диаметры осей сателлитов определяем для случая жесткого водила и двухстороннего закрепления оси в соответствии с расчетной схемой, представленной на рис. 6.
Соответственно По условию прочности на срез:
Соответственно Для обоих условий
Для всех осей по [3] принимаем 6.2.1. Определение диаметра оси сателлита первого планетарного ряда. Из подраздела 2.1.
По условию прочности на изгиб: По условию прочности на срез: Для оси сателлита первого планетарного ряда выбираем больший диаметр
6.2.2. Определение диаметра оси сателлита второго планетарного ряда. Из подраздела 2.1.
По условию прочности на изгиб: По условию прочности на срез: Для оси сателлита второго планетарного ряда выбираем больший диаметр
7. Определение типов и размеров подшипников сателлитов всех
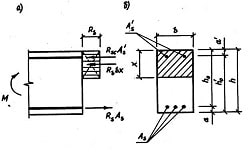
Для сателлитов всех планетарных рядов принимаем роликовые радиальные подшипники с короткими цилиндрическими роликами по ГОСТ 8328-75. Варианты компоновки подшипниковой опоры сателлита могут быть реализованы двумя способами (рис. 7). Предпочтение следует отдавать варианту а). Если при установке подшипника между наружной обоймой и диаметром впадин сателлита остается разница меньше
радиальная нагрузка на каждой передаче максимальная радиальная нагрузка с учетом коэффициента динамичности время работы подшипника на каждой передаче минимальный внутренний диаметр подшипника (см. подраздел 6.2). Результаты расчета сводим в таблицу:
І ряд 0,0675 1,3 511,893 655,496 1971,74 2524,87 3851,85 ІІ ряд 0,042 1,3 1333,33 7738,1 10317,435
Необходимость анализа нагрузок на прямой передаче, при которой подшипники сателлитов не вращаются, обоснована возможностью возникновения именно в этом режиме самых больших усилий, по которым подшипники должны быть проверены на статическую прочность.
7.1. Выбор подшипников сателлитов первого планетарного ряда. 7.1.1. Определение необходимой динамической грузоподъемности подшипников сателлитов первого планетарного ряда.
Угловые скорости сателлитов относительно водила берем из раздела 3 для соответствующего ряда и номера передачи, а время работы из задания на выполнение курсовой работы.
– для радиальных роликовых подшипников – средняя радиальная нагрузка для ступенчатого режима нагружения [4] определяется по формуле:
Соответственно, Суммарная динамическая грузоподъемность подшипников сателлита первого планетарного ряда должна составлять
7.1.2. Определение необходимой статической грузоподъемности подшипников сателлита первого планетарного ряда. При работе на прямой передаче, когда подшипники сателлитов не вращаются проверяем их на статическую грузоподъемность по формуле Суммарная статическая грузоподъемность подшипников одного сателлита первого планетарного ряда должна составлять
7.1.3. Выбор подшипников сателлита первого планетарного ряда. В результате проведенных ранее расчетов имеем следующие ограничения: – диаметр оси сателлита (внутренний диаметр подшипника) по условиям прочности должен быть – наружный диаметр подшипника для сохранения прочности тела сателлита не должен превышать величины – динамическая грузоподъемность пары подшипников должна составлять – статическая грузоподъемность пары подшипников должна составлять Для такой грузоподъемности при таких ограничениях на диаметры из стандартных радиальных роликовых подшипников по схеме рис. 7а не подходят никакие роликовые подшипники [3] или [4]. Поэтому принимаем компоновку по рис. 7б и для получения наименьшей ширины подшипников пересматриваем ограничения на их диаметры: – для возможности получения зубьев на сателлите на зубофрезерном станке максимальный диаметр вал - шестерни (внутренний диаметр подшипника) дополнительно ограничиваем диаметром впадин сателлита – для наружного диаметра подшипника в качестве максимального диаметра принимаем диаметр вершин сателлита Из существующих стандартных подшипников можно поставить два подшипника 32504 ГОСТ 8328-75 [3] или [4]. Это подшипники с размерами:
7.2. Выбор подшипников сателлитов второго планетарного ряда. 7.2.1. Определение необходимой динамической грузоподъемности подшипников сателлитов второго планетарного ряда.
Угловые скорости сателлитов относительно водила берем из раздела 3 для соответствующего ряда и номера передачи, а время работы из задания на выполнение курсовой работы.
– для радиальных роликовых подшипников – средняя радиальная нагрузка для ступенчатого режима нагружения [4] определяется по формуле:
Соответственно, Суммарная динамическая грузоподъемность подшипников сателлита второго планетарного ряда должна составлять
7.2.2. Определение необходимой статической грузоподъемности подшипников сателлита второго планетарного ряда. При работе на прямой передаче, когда подшипники сателлитов не вращаются проверяем их на статическую грузоподъемность по формуле Суммарная статическая грузоподъемность подшипников одного сателлита второго планетарного ряда должна составлять
7.2.3. Выбор подшипников сателлита второго планетарного ряда. В результате проведенных ранее расчетов имеем следующие ограничения: – диаметр оси сателлита (внутренний диаметр подшипника) по условиям прочности должен быть – наружный диаметр подшипника для сохранения прочности тела сателлита не должен превышать величины – динамическая грузоподъемность пары подшипников должна составлять – статическая грузоподъемность пары подшипников должна составлять Для такой грузоподъемности при таких ограничениях на диаметры из стандартных радиальных роликовых подшипников по схеме рис. 7а не подходят никакие роликовые подшипники [3] или [4]. Поэтому принимаем компоновку по рис. 7б и для получения наименьшей ширины подшипников пересматриваем ограничения на их диаметры: – для возможности получения зубьев на сателлите на зубофрезерном станке максимальный диаметр вал - шестерни (внутренний диаметр подшипника) дополнительно ограничиваем диаметром впадин сателлита – для наружного диаметра подшипника в качестве максимального диаметра принимаем диаметр вершин сателлита Из существующих стандартных подшипников можно поставить четыре подшипника 32105 ГОСТ 8328-75 [3] или [4] (по 2 с каждой стороны). Это подшипники с размерами:
8. Определение числа пар трения для всех управляющих элементов
Число пар трения на остановочных тормозах и блокировочном фрикционе определяется из условия действия максимального расчетного момента (подраздел 4.3) с коэффициентом динамичности
Для блокировочного фрикциона наружный диаметр принимаем Данные для расчета и результаты сводим в таблицу:
Тормоз 1 Тормоз 2 Фрикцион
511,893 245,038
4,865 2,329 30,539
СПИСОК ЛИТЕРАТУРЫ
1. Киркач Н.Ф., Баласанян Р.А. Расчет и проектирование деталей машин. Учебное пособие. –Харьков: Основа, 1991. –276 с. 2. Колесные и гусеничные машины высокой проходимости. В 10 томах. Т.3. Трансмиссии, Книга 1. Ступенчатые трансмиссии: расчет и основы конструирования. // Д.О. Волонцевич, В.В. Епифанов, В.К. Белов / Под ред. Е.Е. Александрова. –Харьков, ХГПУ. 1996, –201 с. 3. Анурьев 1 том, 2 том. 4. Бейзельман Р.Д., Цыпкин Б.В., Перель Л.Я. Подшипники качения. Справочник. –М.: Машиностроение, 1975. –572 с.
|
||
|
|
Последнее изменение этой страницы: 2024-06-17; просмотров: 66; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.64 (0.014 с.) |
 или
или  ;
;

 ; (1.1)
; (1.1) ; (1.2)
; (1.2) (1.3)
(1.3) – включен,
– включен,  =0.
=0. . (1.4)
. (1.4) , и выражаем внутреннее передаточное отношение первого планетарного ряда через заданное общее передаточное отношение:
, и выражаем внутреннее передаточное отношение первого планетарного ряда через заданное общее передаточное отношение: ;
;
 ;
;

 все передаточные отношения, кроме 1.
все передаточные отношения, кроме 1. ;
; ;
; .
. – включен,
– включен,  =0.
=0. (1.5)
(1.5) ;
; ;
; ;
; ;
; ;
; . В качестве
. В качестве  подставляем все передаточные отношения, кроме 1 и передаточного отношения, при котором было определено соответствующее k2.
подставляем все передаточные отношения, кроме 1 и передаточного отношения, при котором было определено соответствующее k2. .
. 2.
2. ;
;  . При этом передаточные отношения i1= 0,5; i2= 0,75 получаются при включении соответственно управляющих элементов Т1, Т2, и Ф. Для получения соответствия номеров включаемых передач и управляющих элементов переобозначим нумерацию управляющих элементов в соответствии с рис. 3.
. При этом передаточные отношения i1= 0,5; i2= 0,75 получаются при включении соответственно управляющих элементов Т1, Т2, и Ф. Для получения соответствия номеров включаемых передач и управляющих элементов переобозначим нумерацию управляющих элементов в соответствии с рис. 3.
 .
. . (2.1)
. (2.1) и переходим к внутреннему передаточному отношению, предполагая, что на солнечной шестерне будет минимально возможное количество зубьев:
и переходим к внутреннему передаточному отношению, предполагая, что на солнечной шестерне будет минимально возможное количество зубьев: . (2.2)
. (2.2)
 .
. =3, вычисляем левую часть неравенства, увеличивая
=3, вычисляем левую часть неравенства, увеличивая 
 ;
; .
. ; (2.3)
; (2.3) ; (2.4)
; (2.4) ; (2.5)
; (2.5) ;
;  ;
;  . (2.6)
. (2.6) .
.  . Начиная с вычисленного значения
. Начиная с вычисленного значения  , увеличиваем на единицу его значения и вычисляем
, увеличиваем на единицу его значения и вычисляем  ,
,  и
и  до получения целочисленных значений, учитывая, что должно выполняться условие
до получения целочисленных значений, учитывая, что должно выполняться условие  .
. .
.  . Начиная с вычисленного значения
. Начиная с вычисленного значения  ,
,  и
и  до получения целочисленных значений, учитывая, что должно выполняться условие
до получения целочисленных значений, учитывая, что должно выполняться условие  .
. – включен,
– включен,  =0 (см. рис. 3):
=0 (см. рис. 3): (3.1)
(3.1) с-1;
с-1; с-1.
с-1. и
и  . При этом следует помнить, что вычислять необходимо не абсолютные значения угловых скоростей сателлитов
. При этом следует помнить, что вычислять необходимо не абсолютные значения угловых скоростей сателлитов  , а скорости вращения сателлитов относительно водила
, а скорости вращения сателлитов относительно водила  . Эти зависимости получены из уравнения Виллиса (1.3) следующим образом.
. Эти зависимости получены из уравнения Виллиса (1.3) следующим образом. , (3.2)
, (3.2) , откуда
, откуда . (3.3)
. (3.3) . (3.4)
. (3.4) с-1;
с-1; с-1.
с-1. – включен,
– включен,  =0 (см. рис. 3):
=0 (см. рис. 3): (3.5)
(3.5) с-1;
с-1; с-1;
с-1; с-1;
с-1; с-1;
с-1;


 (4.1)
(4.1)
 (4.2)
(4.2)












 что соответствует нашему i1.
что соответствует нашему i1.
 , поскольку момент на центральном звене первого планетарного ряда равен нулю, то и моменты на остальных звеньях этого ряда равны нулю.
, поскольку момент на центральном звене первого планетарного ряда равен нулю, то и моменты на остальных звеньях этого ряда равны нулю.  ,
,  .
.






 что соответствует нашему i2.
что соответствует нашему i2.























 , а КПД внутреннего зацепления
, а КПД внутреннего зацепления  .
.















 (4.6)
(4.6)






 и количество циклов перемен напряжений в зубчатом зацеплении солнечная шестерня – сателлит с учетом количества сателлитов (см. подраздел 2.1)
и количество циклов перемен напряжений в зубчатом зацеплении солнечная шестерня – сателлит с учетом количества сателлитов (см. подраздел 2.1)  :
: ,
, – время работы на передаче (по условию
– время работы на передаче (по условию 
 часов).
часов). :
: , где
, где  – из таблицы 3.4 [2] для
– из таблицы 3.4 [2] для  и без плавающих звеньев.
и без плавающих звеньев. , с-1
, с-1 , Нм
, Нм Нм.
Нм. и изгибную
и изгибную  выносливость.
выносливость.
 – предел контактной выносливости поверхности зубьев, соответствующий базовому числу циклов перемен напряжений, определяемый по табл. 3.17 [1]. В нашем случае для стали 20Х2Н4А (термообработка цементация с последующей закалкой до твердости поверхности
– предел контактной выносливости поверхности зубьев, соответствующий базовому числу циклов перемен напряжений, определяемый по табл. 3.17 [1]. В нашем случае для стали 20Х2Н4А (термообработка цементация с последующей закалкой до твердости поверхности  )
)  ;
; – коэффициент безопасности для зубчатых колес, имеющих поверхностное упрочнение зубьев,
– коэффициент безопасности для зубчатых колес, имеющих поверхностное упрочнение зубьев,  – коэффициент, учитывающий шероховатость сопрягаемых поверхностей зубьев (табл. 3.18) [1]. Принимаем
– коэффициент, учитывающий шероховатость сопрягаемых поверхностей зубьев (табл. 3.18) [1]. Принимаем  ;
; – коэффициент, учитывающий окружную скорость зубьев шестерни, определяется по рис.3.17 [1]. Принимаем
– коэффициент, учитывающий окружную скорость зубьев шестерни, определяется по рис.3.17 [1]. Принимаем  ;
; – коэффициент долговечности (3.35) [1], вычисляется по формуле
– коэффициент долговечности (3.35) [1], вычисляется по формуле  . В соответствии с ограничениями, описанными в (3.38) [1], принимаем
. В соответствии с ограничениями, описанными в (3.38) [1], принимаем  .
.
 млн.
млн. МПа.
МПа. , где
, где – предел изгибной выносливости (табл. 3.19) [1],
– предел изгибной выносливости (табл. 3.19) [1],  МПа;
МПа; – коэффициент, учитывающий характер приложения нагрузки, по табл. 3.20 [1] с учетом реверсивности передачи и работы сателлита со знакопеременными изгибными напряжениями
– коэффициент, учитывающий характер приложения нагрузки, по табл. 3.20 [1] с учетом реверсивности передачи и работы сателлита со знакопеременными изгибными напряжениями  ;
; – коэффициент долговечности для изгибного нагружения определяется по формулам (3.53)–(3.55) [1]:
– коэффициент долговечности для изгибного нагружения определяется по формулам (3.53)–(3.55) [1]: .
. =
=  – базовое число циклов перемен напряжений для изгибного нагружения;
– базовое число циклов перемен напряжений для изгибного нагружения; – эквивалентное число циклов перемен напряжений для изгибного нагружения
– эквивалентное число циклов перемен напряжений для изгибного нагружения
 млн.
млн. .
. – коэффициент безопасности, который по (3.56), табл. 3.19 и табл. 3.21 [1] принимаем
– коэффициент безопасности, который по (3.56), табл. 3.19 и табл. 3.21 [1] принимаем  ;
; – коэффициент, учитывающий чувствительность материала к концентрации напряжений, принимаем
– коэффициент, учитывающий чувствительность материала к концентрации напряжений, принимаем  ;
; – коэффициент, учитывающий шероховатость нешлифованной переходной поверхности зубьев, принимаем
– коэффициент, учитывающий шероховатость нешлифованной переходной поверхности зубьев, принимаем  .
. МПа.
МПа. ,
, – вспомогательный коэффициент диаметра (3.32) [1] для заданных условий
– вспомогательный коэффициент диаметра (3.32) [1] для заданных условий  ;
; – коэффициент ширины венца, принимаемый с учетом табл. 3.15 [1]
– коэффициент ширины венца, принимаемый с учетом табл. 3.15 [1]  . Если внутреннее передаточное отношение ряда
. Если внутреннее передаточное отношение ряда  , то коэффициент ширины венца для солнечной шестерни принимаем по формуле
, то коэффициент ширины венца для солнечной шестерни принимаем по формуле  ;
; ,то
,то 
 – коэффициент, учитывающий неравномерность распределения нагрузки по ширине венца, по рис. 3.14 [1] для твердости выше 350НВ и варианта 6 равен
– коэффициент, учитывающий неравномерность распределения нагрузки по ширине венца, по рис. 3.14 [1] для твердости выше 350НВ и варианта 6 равен  ;
; – передаточное отношение в зацеплении солнечная шестерня – сателлит, которое определяется по формуле
– передаточное отношение в зацеплении солнечная шестерня – сателлит, которое определяется по формуле  .
. мм.
мм. , где
, где – вспомогательный коэффициент модуля [1] для заданных условий
– вспомогательный коэффициент модуля [1] для заданных условий  ;
; – коэффициент, учитывающий неравномерность распределения нагрузки по ширине венца, по рис. 3.14 [1] для твердости выше 350НВ и варианта 6 равен
– коэффициент, учитывающий неравномерность распределения нагрузки по ширине венца, по рис. 3.14 [1] для твердости выше 350НВ и варианта 6 равен  ;
; – коэффициент, учитывающий форму зуба, по рис. 3.18 [1] для
– коэффициент, учитывающий форму зуба, по рис. 3.18 [1] для 
 принимаем
принимаем  .
. мм.
мм. мм и
мм и  мм. Тогда ширина венца
мм. Тогда ширина венца  мм. Принимаем
мм. Принимаем  мм.
мм. ,
, для прямозубых колес по формуле (3.28’) [1];
для прямозубых колес по формуле (3.28’) [1];  (3.29) [1];
(3.29) [1]; ; где по (3.3) [1]
; где по (3.3) [1] ;
; для прямозубых колес;
для прямозубых колес; по табл. 3.16 [1] для скорости
по табл. 3.16 [1] для скорости  м/с
м/с  .
. МПа.
МПа. МПа.
МПа. . Условие контактной прочности при действии максимальных нагрузок выполняется.
. Условие контактной прочности при действии максимальных нагрузок выполняется. , где
, где  .
. и
и  для прямозубых колес;
для прямозубых колес; по табл. 3.16 [1] для скорости
по табл. 3.16 [1] для скорости  м/с
м/с  .
. и
и  МПа.
МПа. МПа.
МПа. ,
, МПа по табл. 3.19 [1];
МПа по табл. 3.19 [1]; , где
, где  и
и  для колес, полученных методом штамповки при отсутствии абразивного износа (закрытая передача с жидкой смазкой);
для колес, полученных методом штамповки при отсутствии абразивного износа (закрытая передача с жидкой смазкой);  для модуля
для модуля  МПа.
МПа. . Условие изгибной прочности при действии максимальных нагрузок выполняется.
. Условие изгибной прочности при действии максимальных нагрузок выполняется. и количество циклов перемен напряжений в зубчатом зацеплении солнечная шестерня – сателлит с учетом количества сателлитов
и количество циклов перемен напряжений в зубчатом зацеплении солнечная шестерня – сателлит с учетом количества сателлитов  ,
, , где
, где  – из таблицы 3.4 [2] для
– из таблицы 3.4 [2] для  , с-1
, с-1 Нм. При этом расчетное число циклов перемен напряжений по формуле 3.37 [1]
Нм. При этом расчетное число циклов перемен напряжений по формуле 3.37 [1] . В соответствии с ограничениями, описанными в (3.38) [1], принимаем
. В соответствии с ограничениями, описанными в (3.38) [1], принимаем 
 млн.
млн. .
.
 млн.
млн. , где
, где ;
; .
. мм.
мм. , где
, где
 принимаем
принимаем  .
. мм.
мм. мм и
мм и  мм. Тогда ширина венца
мм. Тогда ширина венца  мм.
мм. , где
, где  ; где по (3.3) [1]
; где по (3.3) [1] ;
; м/с
м/с  .
. МПа.
МПа. МПа.
МПа. . Условие контактной прочности при действии максимальных нагрузок выполняется.
. Условие контактной прочности при действии максимальных нагрузок выполняется. .
. м/с
м/с  .
. и
и  МПа.
МПа. МПа.
МПа. для модуля
для модуля  МПа.
МПа. . Условие изгибной прочности при действии максимальных нагрузок выполняется.
. Условие изгибной прочности при действии максимальных нагрузок выполняется. , где
, где  . Отсюда
. Отсюда  , где
, где  .
. МПа;
МПа;  из исходных данных.
из исходных данных. Нм принимаем
Нм принимаем  Нм.
Нм. м.
м. Нм,
Нм,  Нм,
Нм,  м.
м. По условию прочности на изгиб:
По условию прочности на изгиб: , где
, где  ;
;  ;
; .
. , где
, где  .
. .
. ;
;  ;
;  .
. МПа и
МПа и  МПа;
МПа;  , из подраздела 2.2
, из подраздела 2.2  ,из п.4.3.1
,из п.4.3.1  Нм, из подраздела 5.1
Нм, из подраздела 5.1  .
. м;
м;  Нм;
Нм;  Н;
Н;  Нм.
Нм. м.
м. м.
м. м.
м. , из подраздела 2.2
, из подраздела 2.2  ,из п.4.3.2
,из п.4.3.2  Нм, из подраздела 5.2
Нм, из подраздела 5.2  мм,
мм,  м;
м;  Нм;
Нм;  Н;
Н;  Нм.
Нм. м.
м. м.
м. м.
м. зацепления, необходимо последовательно попробовать разместить аналогичный по грузоподъемности подшипник без наружной обоймы, затем и без внутренней и без наружной, и только если это не решило проблемы, переходить к варианту компоновки 7 б).
зацепления, необходимо последовательно попробовать разместить аналогичный по грузоподъемности подшипник без наружной обоймы, затем и без внутренней и без наружной, и только если это не решило проблемы, переходить к варианту компоновки 7 б). Исходными данными для выбора подшипников по критерию статической прочности и динамической долговечности согласно [3], являются:
Исходными данными для выбора подшипников по критерию статической прочности и динамической долговечности согласно [3], являются: , где
, где  ,
,  ,
,  (см. подраздел 6.2);
(см. подраздел 6.2); ч;
ч; , Нм
, Нм , Нм
, Нм , Нм
, Нм , Н
, Н , Н
, Н , Н
, Н

 , где
, где  – требуемая долговечность подшипника в миллионах оборотов, складывающаяся из долговечностей на всех передачах, на которых работает первый планетарный ряд
– требуемая долговечность подшипника в миллионах оборотов, складывающаяся из долговечностей на всех передачах, на которых работает первый планетарный ряд  . Здесь
. Здесь  об.
об. об.
об. об.
об. млн. об.
млн. об. – эквивалентная динамическая нагрузка на подшипник, определяемая по следующим зависимостям:
– эквивалентная динамическая нагрузка на подшипник, определяемая по следующим зависимостям: , где коэффициент безопасности принимаем
, где коэффициент безопасности принимаем  , температурный коэффициент для температуры менее 100°С –
, температурный коэффициент для температуры менее 100°С –  .
.
 Н.
Н. Н.
Н. Н.
Н. , где
, где  – коэффициент надежности, принимаемый по [3]
– коэффициент надежности, принимаемый по [3]  , а
, а  – эквивалентная статическая нагрузка, определяемая для роликовых радиальных подшипников по формуле
– эквивалентная статическая нагрузка, определяемая для роликовых радиальных подшипников по формуле  Н.
Н. Н.
Н. м;
м; м или 25,5 мм.
м или 25,5 мм. Н, а для одного подшипника соответственно
Н, а для одного подшипника соответственно  Н.
Н. Н, а для одного подшипника соответственно
Н, а для одного подшипника соответственно  Н.
Н. м.
м. м.
м. мм,
мм,  мм,
мм,  мм и грузоподъемностью
мм и грузоподъемностью  Н,
Н,  Н.
Н. об.
об. об.
об. об.
об. млн. об.
млн. об. Н.
Н. Н.
Н. Н.
Н. Н.
Н. Н.
Н. м;
м; м или 22,5 мм.
м или 22,5 мм. Н, а для одного подшипника соответственно
Н, а для одного подшипника соответственно  Н.
Н. Н, а для одного подшипника соответственно
Н, а для одного подшипника соответственно  Н.
Н. м.
м. м.
м. мм,
мм,  мм и грузоподъемностью
мм и грузоподъемностью  Н,
Н,  Н каждый.
Н каждый. и допускаемое удельное давление на поверхностях трения
и допускаемое удельное давление на поверхностях трения  МПа. Наружный диаметр дисков трения тормозов
МПа. Наружный диаметр дисков трения тормозов  выбираем по максимальному из всех рядов делительному диаметру эпициклической шестерни. Соотношение внутреннего и наружного диаметров принимаем равным 0,75.
выбираем по максимальному из всех рядов делительному диаметру эпициклической шестерни. Соотношение внутреннего и наружного диаметров принимаем равным 0,75. , где
, где  – коэффициент запаса по трению для фрикционов, работающих в масле, принимаем по [2]
– коэффициент запаса по трению для фрикционов, работающих в масле, принимаем по [2]  ;
;  – средний радиус поверхностей трения
– средний радиус поверхностей трения  м;
м;  – площадь одной поверхности трения
– площадь одной поверхности трения  .
. м. И для него, соответственно
м. И для него, соответственно  м и
м и 
 , Н
, Н расчетное
расчетное