Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Опис конструкції машини і технології виробництва робітСодержание книги
Поиск на нашем сайте
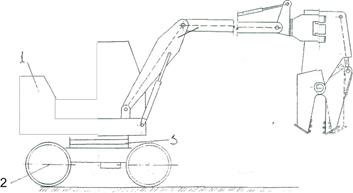
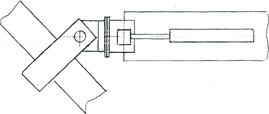
Екскаватор (рис.2.l.) складається з екскаватора базового 1, включаючийосновні вузли і системи: пристрій ходовий 2; платформа поворотна 3 з механізмами і агрегатами, системи сервокерування, пневмосистеми, електроустаткування, системи опалювання і вентиляція, бульдозера 4 і робочого устаткування з гідросистемою 5. Поворотна платформа 3 спирається на раму пристрою ходового 2 через роликовий опорно-поворотний пристрій. Рух екскаватора і його робочого органу здійснюється гідравлічним приводом, основними елементами якого є: гідронасос, гідророзподілювачі, клапанно-запобіжна апаратура, гідромотори ходу і повороту, гідроциліндри стріли, затискач і зіву, бак робочої рідини і сполучні трубопроводи. Гідропривід екскаватора в поєднанні з гідравлічним сервокеруванням забезпечує плавне регулювання швидкості і поєднання робочих операцій стріли, затискач і зіву поворотом. Електроустаткування дозволяє запуск двигуна екскаватора з кабіни і з майданчика обслуговування двигуна. Конструкція кабіни машиніста, прилади, розташовані на панелях пульта управління, системи опалювання і вентиляція забезпечують нормальні умови роботи машиніста. На екскаваторі встановлений двигун СМД-17Н або СМД-15Н чотирьохтактний чотирициліндровий дизель рідинного охолоджування з вихрокамерним сумішеутворенням і турбо наддуву (СМД-17Н). Дана машина на базі гідравлічного екскаватора Ю-4321 з робочим устаткуванням - затискач, призначена для виконання відновних робіт. Ці роботи ведуться на будівельних майданчиках для руйнування старих будівель. Затискач в змозі поруйнувати бетонну, цегляну стіну, колону діаметром до 700мм, а також виконати вантажний - розвантажувальні роботи з вантажем до 1500кг І самостійно вантажити його в транспортний засіб. Крім того, ця машина застосовується при розчищання завалів, що виникли після землетрусу, для цього вона оснащена допоміжним устаткуванням - відвалом бульдозера. Екскаватор може виконувати вказані роботи в діапазоні температур від 233К (мінус 40 °С) до 313К (плюс 40 °С), а також виконувати роботи в темний час доби, для цього оснащений світловими приладами. Технологія виробництва робіт показана на малюнку 2.2. і на малюнку 2.3.
Рис.2.1 Загальний вид екскаватора.
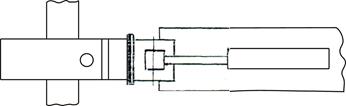
Рис.2.2. Процес затискач елементу.
Вигляд А
Вигляд В
2.3. Робота екскаватора на максимальному вильоті. Розрахунок екскаватора ео-4321 з робочим устаткуванням затискач
Стрілопідйомний механізм
Допустимі значення відстаней до осі шарніра кріплення корпусу гідроциліндра до поворотної платформи.
хц < 0,5∙Допк+(0,1...0,15)=0,5∙1,5+0,1=0,85 м, 1/3 Допк=0,55∙m=0,55∙19,86=1,5 м,
де m – маса екскаватора, т; Допк - діаметр опорний - поворотного круга, м;
де хц, Yц – орієнтовна відстань відповідно від осі опорно-поворотного круга і від рівня стоянки екскаватора до осі провушини корпусу гідроциліндра; hпл - висота платформи, hпл=0,15... 0,25м. Відстань по вертикалі від рівня стоянки екскаватора до осі повороту стріли
Yс= (Нв-Нк) /2+lз+R=(3-5.8) /2+2,75+ 1,3=2,15 м.
Розрахункові параметри, які необхідні для його вибору по нормах, рекомендується визначати по орієнтовних значеннях кута установки β і довжини 1 нерухомої ланки, повного кута повороту φ0 = 90° стріл і довжини плеча ρк зусилля, що розвивається на штоку гідроциліндра. Приймаємо кут β= 40° і визначаємо орієнтовну довжину нерухомої ланки
L= (YС - Yп)/соsβ = (2,65 - 1,137)/cos40° =0,98 м
Розрахунковий хід поршня:
р = 2Lsin(φ0/2)= 20,98sin(90°/2)= 1,385 м
Орієнтуємося на близьке до вертикального напряму (µ=90°) осі гідроциліндра з повністю висунутим штоком, тоді відстань rк від осі повороту стріли до осі гідроциліндра, тобто довжина плеча зусилля на штоку:
Rк= lsin(µ - β)=0,98 sin(90° - 40°)= 0,75 м
Визначимо момент від сил тяжіння робочого устаткування з вантажем, за умови, що приведена до головки маса стріли mс.пр. =0,4∙2640=1056 кг:
Розрахунковий діаметр гідроциліндра:
По діаметру Др і ходу поршня Sp вибираємо гідроциліндр: J= 125 мм; S= 1400 мм; у=1,65; S=1,845; 5к = 3 245; N= 1,758. При використовуванні в стрілопідйомних механізмах золотникових гідроциліндрів з П = 1,65 і насосів з діапазоном регулювання п = - 1.... 2,5 для обмеження максимальних динамічних навантажень в циліндрі рекомендуються кути тиску: ТН = 70,6°; ТК = 74,6°. По параметрах вибраного гідроциліндра і прийнятим значенням кутів тиску радіус коромисла:
Повний кут повороту відомої ланки (стріли):
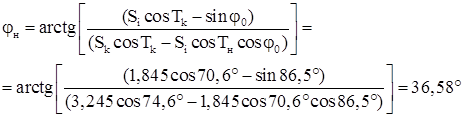
Початковий кут відхилення відомої ланки:
Довжина нерухомої ланки:
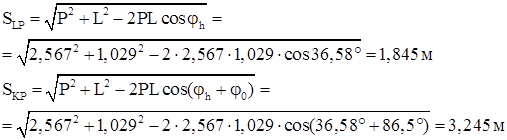
Для перевірки обчислень по знайдених лінійних параметрах Р, L, φп визначимо розрахункову початкову і кінцеву величини гідроциліндра:
Якщо з точністю вироблених обчислень SLP=Si<SKP=SK, то параметри механізму визначені правильно. Вважаючи уц= 1,4м, знайдемо кут установки нерухомої ланки:
β= arccos[(yc-yц) /L]=аrссоs[(2,15 - 1,4)/1,029]= 43,21°
Приймаємо Хс=Хц=0,85 м, обчислюємо відстань від осі опорно-поворотного пристрою до осі п'яти стріли:
Хс=Хц-L∙sinβ= 0,85-1,029∙sin43°21”= 0,145 м
Теоретичну довжину стріли знаходимо як відстань між головкою і її п'ятою, суміщеною з крапкою:
Рис.3.1 До розрахунку зусиль в робочому устаткуванні.
Механізм повороту затискач
Механізм повороту затискач розраховується для фіксованого нижнього положення гранично опущеної стріли. Повний кут повороту рукояти повинен складати φ= 110°…130°, приймаємо φ = 130°. Кут φy відхилення осі рукояті від теоретичної осі стріли при втягнутому штоку гідроциліндра вибираємо в межах: φу=20°... 30°, приймаємо φу= 25°. Орієнтовну довжину
Розрахунковий хід поршня:
Sp= 2∙
Відстань
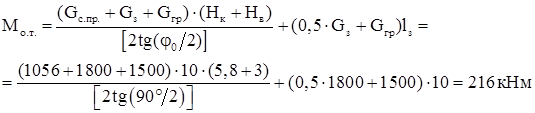
Момент опору повороту рукояті:
Мот=Gзг(Iз+0,5R)+Gз∙0,35∙Із=(1800+1500)∙10∙(2,7+0,5∙1,3)+1800∙10∙0,35∙2,7= 127560 Нм.
Розрахунковий діаметр поршня знаходимо при z= 1:
По діаметру Др і ходу Sp поршня вибираємо гідроциліндр Д= 125мм, d= 60мм, S= 1250мм, So= 0,435м, SH= 1,685м, So= 2,935(Ψ= 1,65). Виходячи із забезпечення рівності кутів тиску і довжин плечей зусилля для крайніх положень штока визначаємо параметри механізму приводу затискач при γн= γк= 0,5;
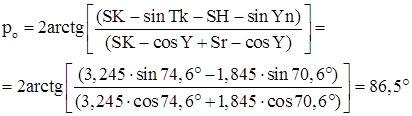
φ0= 0,5∙130°= 65°; ρ=
Довжини плечей зусиль, що розвиваються гідроциліндром в крайніх положеннях штока:
rн= ρІsinφн/Sн=0,67∙2,32∙sin17,8°/1,685= 0,282 м; rк= ρІsin(φн+φ0)/Sк=0,63∙2,32∙sin(17,8°+130°)/2,935= 0,282 м
Оскільки параметри механізму були визначені з умови rH=rK, розрахунок виконаний правильно. Рушійний момент від гідроциліндра в крайніх положеннях при Номінальному тиску Р н в поршневій порожнині гідроциліндра:
Кут β відхилення осі нерухомої ланки від теоретичної осі стріли повинен бути не менше кута між осями теоретичної осі стріли і її верхньої частини. При λ= 10°:
В= 25° - φ0 + λ= 25° - 17,8° + 10° = 17,2°,[3]
|
||
|
|
Последнее изменение этой страницы: 2022-09-03; просмотров: 129; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.60 (0.007 с.) |










 радіусу коромисла визначаємо по формулі:
радіусу коромисла визначаємо по формулі: від осі повороту рукояті до осі гідроциліндра:
від осі повороту рукояті до осі гідроциліндра:
 = 0,67м;
= 0,67м;