Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематика плоскопараллельного движения твердого телаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
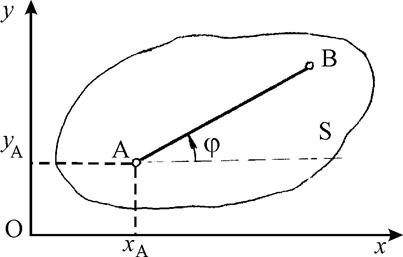
Плоскопараллельным (плоским) движением твердого тела называется такое движение, при котором траектории всех его точек лежат в плоскостях, параллельных некоторой неподвижной плоскости. Пусть тело движется параллельно некоторой неподвижной плоскости П (рис. 23). Если пересечь данное тело плоскостью х О у, параллельной неподвижной плоскости П, то в сечении получится какая-то плоская фигура S. Эта фигура будет перемещаться при движении тела, оставаясь все время в той же плоскости х О у. Очевидно, что при таком движении тела все его точки, лежащие на перпендикуляре А а к плоскости фигуры, движутся совершенно одинаково, так же как и точка А этой фигуры. Все точки, расположенные на перпендикуляре В в к плоскости фигуры, движутся так же, как и точка В этой фигуры, и т. д. Отсюда следует, что для определения плоского движения тела достаточно знать движение плоской фигуры в ее плоскости. Положение неизменяемой плоской фигуры S в ее плоскости вполне определяется положением двух произвольных ее точек А и В. Следовательно, изучение движения плоской фигуры в ее плоскости сводится к изучению движения прямолинейного отрезка АВ, с которым фигура неизменно связана. Но положение отрезка АВ определяется двумя координатами х А и у А точки А, называемой полюсом и углом j, который образует этот отрезок с некоторой осью неизменного направления, лежащей в плоскости данной фигуры (рис. 24).
Рис. 23
Рис. 24 Таким образом, движение плоской фигуры в ее плоскости можно определить следующими тремя уравнениями:
x A = х A (t),
y A = y A (t),
j = j (t).
Из этих уравнений следует, что движение плоской фигуры можно разложить на два движения: 1) поступательное движение вместе с полюсом А и определяемое первыми двумя уравнениями и 2) вращательное движение вокруг полюса, определяемое третьим уравнением. При этом угловая скорость вращательного движения не зависит от выбора полюса. Очевидно, что скорость любой точки В плоской фигуры равна геометрической сумме двух скоростей: скорости полюса
причем Отсюда следует теорема о проекциях скоростей точек плоской фигуры: проекции скоростей двух точек плоской фигуры на ось h, проходящую через эти точки, равны между собой. Мгновенным центром скоростей (МЦС) называется такая точка Р плоской фигуры, скорость которой в данный момент равна нулю. Если известны скорость
АР =
получим точку Р, которая является МЦС (рис. 25).
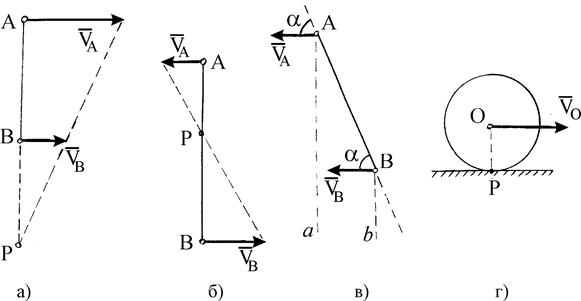
Рис. 25 Если же известны направления скоростей двух точек плоской фигуры, то МЦС находят как точку пересечения перпендикуляров, восстановленных в этих точках к направлениям их скоростей. Если мгновенный центр скоростей Р найден и если известна угловая скорость фигуры, то скорость любой точки В фигуры определяется как скорость этой точки во вращательном движении вокруг МЦС, т. е. вектор
Отметим другие случаи нахождения положения МЦС. Если скорости точек А и В параллельны и АВ ^ На рис. 26, в показан случай, когда
Рис. 26 При качении без скольжения одного тела по поверхности неподвижного другого (рис. 26, г) МЦС совпадает с точкой Р соприкосновения тел (так как при отсутствии скольжения скорость точки соприкосновения равна нулю). Ускорение любой точки движущейся плоской фигуры можно определить как геометрическую сумму ускорений этой точки в поступательном движении вместе с некоторым полюсом и вращательным движением вокруг этого полюса. Если известны ускорение
Здесь вектор
При этом вектор
Рис. 27
Ускорение точки В можно определить, если спроецировать векторное равенство
на оси х и у (см. рис. 27) и найти проекции этого ускорения:
По проекциям находят модуль ускорения точки В:
Задача К2
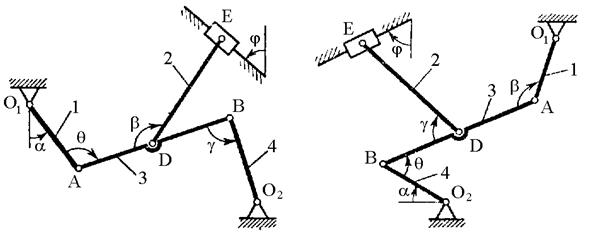
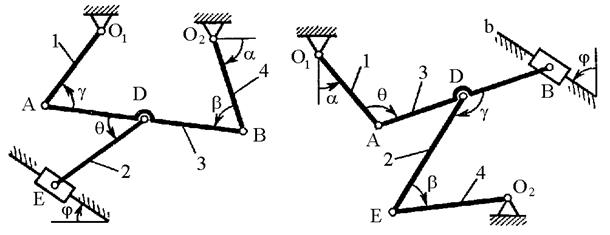
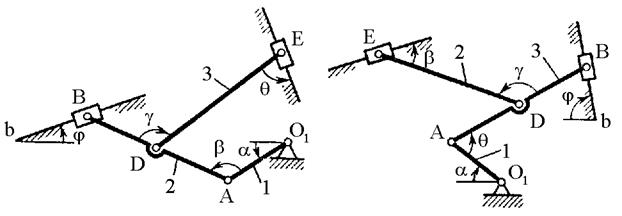
Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна В или Е(рис. К2.0–К2.7) или из стержней 1, 2, 3 и ползунов В и Е (рис. К2.8, К2.9), соединенных друг с другом и с неподвижными опорами O1, О2 шарнирами; точка D находится в середине стержня АВ. Длины стержней равны соответственно l 1 = 0,4 м, l 2 = 1,2 м, l 3 = 1,4 м, l 4 = 0,6 м. Положение механизма определяется углами a, b, g, j, q. Значения этих углов и других заданных величин указаны в табл. К2а (для рис. К2.0–К2.4) или в табл. К2б (для рис. К2.5–К2.9); при этом в табл. К2а заданные w1 или w4 – величины постоянные. Определить величины, указанные в таблицах в столбцах «Найти». Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки (например, угол g на рис. К2.8 следует отложить от DB по ходу часовой стрелки, а на рис. К2.9 – против хода часовой стрелки и т. д.). Построение чертежа начинать со стержня, направление которого определяется углом a; ползун с направляющими для большей наглядности изобразить так, как в примере К2 (см. рис. К2б). Заданные угловую скорость и угловое ускорение считать направленными против часовой стрелки, а заданные скорость
Таблица К2а (к рис. К2.0–К2.4)
Таблица К2б (к рис. К2.5–К2.9)
Рис. К2.0 Рис. К2.1
Рис. К2.2 Рис. К2.3
Рис. К2.4 Рис. К2.5
Рис. К2.6 Рис. К2.7
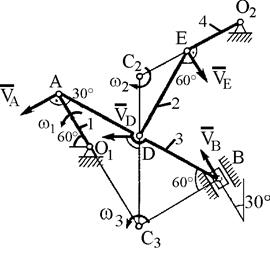
Рис. К2.8 Рис. К2.9 Указания. Задача К2 – на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звенумеханизма в отдельности. При определении ускорений точек механизма исходить из векторного равенства Пример К2. Механизм (рис. К2а) состоит из стержней 1, 2, 3, 4 и ползуна В, соединенных друг с другом и с неподвижными опорами O1 и О2 шарнирами.
Рис. К2а Рис. К2б
Дано: a = 60°, b = 150°, g = 90°, j = 30°, q = 30°, AD = DB, l 1 = 0,4 м, l 2= 1,2 м, l 3 = 1,4 м, w1 = 2 c–1, e1 = 7 с–2 (направления w1 и e1 – против хода часовой стрелки). Определить: VB, VE, w2, a B, e3. Решение. 1. Строим положение механизма в соответствии с заданными углами (рис. К2б; на этом рисунке изображаем все векторы скоростей). 2. Определяем VB. Точка В принадлежит стержню АВ. Чтобы найти VB, надо знать скорость какой-нибудь другой точки этого стержня и направление VA = w1× l 1 = 0,8 м/с;
Направление
VВ × cos 30° = VA × cos 60° и VВ = 0,46 м/с. (46)
3. Рассчитываем
Чтобы вычислить С3D и С3B, заметим, что DAС3В – прямоугольный, так как острые углы в нем равны 30° и 60°, и что С3В = AB × sin 30° = 0,5 × AB = ВD. Тогда DВС3D является равносторонним и С3B = С3D. В результате равенство (47) дает: VD = VB = 0,46 м/с;
Так как точка Е принадлежит одновременно стержню O2E, вращающемуся вокруг O2, то
4. Определяем w2. Так как МЦС стержня 2 известен (точка С2) и С2D = l 2/(2 × cos 30°) = 0,69 м, то
5. Определяем
(51)
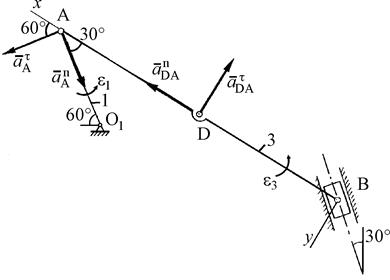
Рис. К2в
Вектор Для определения
Изображаем на чертеже векторы
Таким образом, у величин, входящих в равенство (52), неизвестны только числовые значения а В и Чтобы определить а В, спроектируем обе части равенства (52) на направление ВА (ось х), перпендикулярное к неизвестному вектору
а В× сos 30° =
Подставив в равенство (54) числовые значения всех величин из (51) и (53), найдем, что
а В = 0,72 м/с2. (55)
Так как получилось а В > 0, то, следовательно, вектор 6. Находим e3. Чтобы найти e3, сначала вычислим
– а В× sin 30° =
Подставив в равенство (56) числовые значения всех величин из (55) и (51), найдем, что
Ответ: VB = 0,46 м/с; VE = 0,46 м/с; w2 = 0,67 с1; а B = 0,72 м/с2; e3 = 2,56 с–2. Примечание 1. Если точка B, ускорение которой определяется, движется не прямолинейно (например, как на рис. К2.0–К2.4, где В движется по окружности радиуса О2В), то направление В этом случае
При этом вектор Значение После этого в равенстве (57) остаются неизвестными только значения Найдя
Примечание 2. Если требуется определить ускорение точки D звена АВ (рис. К2г), то следует воспользоваться векторным равенством:
Рис. К2г Ускорение точки D найдем по его проекциям на координатные оси, спроецировав приведенное выше векторное равенство на эти оси:
Здесь Вектор
Вопросы для самоконтроля
1. Какое движение твердого тела называется плоскопараллельным? 2. Какими уравнениями задается плоскопараллельное движение? 3. Как по уравнениям движения плоской фигуры найти скорость полюса и угловую скорость вращения вокруг полюса? 4. Как определить скорость любой точки плоской фигуры? 5. Сформулируйте теорему о проекциях скоростей двух точек плоской фигуры. 6. Что называется мгновенным центром скоростей плоской фигуры и как найти положение МЦС в различных случаях? 7. Сформулируйте теорему об ускорениях точек плоской фигуры.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 626; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.64 (0.008 с.) |


 и скорости
и скорости  точки В во вращательном движении вокруг полюса (рис. 25), т. е.
точки В во вращательном движении вокруг полюса (рис. 25), т. е. =
=  = w×АВ.
= w×АВ. /w,
/w,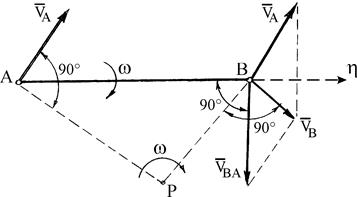

 некоторой точки А фигуры (ускорение полюса), а также угловая скорость w и угловое ускорение e фигуры, то ускорение любой ее точки В определяется по формуле
некоторой точки А фигуры (ускорение полюса), а также угловая скорость w и угловое ускорение e фигуры, то ускорение любой ее точки В определяется по формуле =
=  +
+  =
=  +
+  .
. = w2 × АВ,
= w2 × АВ,  = e × АВ.
= e × АВ.
 =
=  –
–  ,
,  =
=  +
+  .
.
 – от точки В к b (на рис. К2.5–К2.9).
– от точки В к b (на рис. К2.5–К2.9).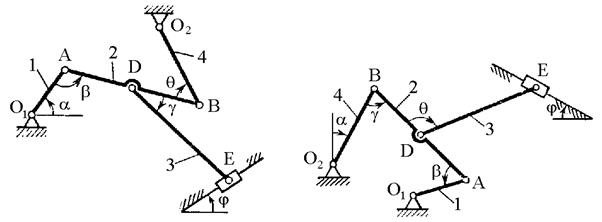

 =
=  +
+  +
+  , где А – точка, ускорение
, где А – точка, ускорение  +
+  ); В – точка, ускорение
); В – точка, ускорение 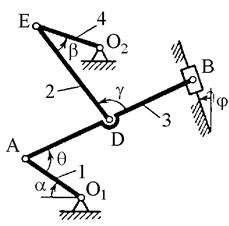
 . По данным задачи, учитывая направление w1, можем определить
. По данным задачи, учитывая направление w1, можем определить  ; численно
; численно . Точка Е принадлежит стержню DE. Следовательно, по аналогии с предыдущим, чтобы определить
. Точка Е принадлежит стержню DE. Следовательно, по аналогии с предыдущим, чтобы определить  перпендикулярен к отрезку С3D, соединяющему точки D и С3, и направлен в сторону поворота. Величину VD найдем из пропорции
перпендикулярен к отрезку С3D, соединяющему точки D и С3, и направлен в сторону поворота. Величину VD найдем из пропорции (47)
(47) VE = VD = 0,46 м/с. (49)
VE = VD = 0,46 м/с. (49) c–1. (50)
c–1. (50) (рис. К2в, на котором изображены все векторы ускорений). Точка В принадлежит стержню АВ. Чтобы найти
(рис. К2в, на котором изображены все векторы ускорений). Точка В принадлежит стержню АВ. Чтобы найти  =
=  +
+  , где численно
, где численно = e1 × l 1 = 2,8 м/с2;
= e1 × l 1 = 2,8 м/с2; =
=  × l 1 = 1,6 м/с2.
× l 1 = 1,6 м/с2.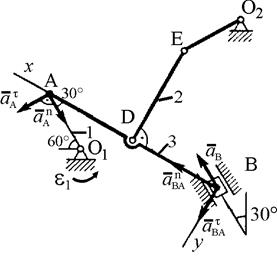
 +
+  (вдоль ВА от В к А) и
(вдоль ВА от В к А) и  = w32 × l 3. Находим w3 с помощью МЦС C3 стержня 3:
= w32 × l 3. Находим w3 с помощью МЦС C3 стержня 3: c–1 и
c–1 и  = 0,61 м/с2. (53)
= 0,61 м/с2. (53) ; их можно найти, спроектировав обе части равенства (52) на какие-нибудь две взаимно перпендикулярные оси.
; их можно найти, спроектировав обе части равенства (52) на какие-нибудь две взаимно перпендикулярные оси. × cos 60° –
× cos 60° –  × cos 30° +
× cos 30° +  = e3 × l 3 получим:
= e3 × l 3 получим: c–2.
c–2. +
+  ) и исходное уравнение (52) примет вид
) и исходное уравнение (52) примет вид +
+  ,
,  и
и  вычисляется по формуле
вычисляется по формуле  /r =
/r =  определяется так же, как скорость любой другой точки механизма.
определяется так же, как скорость любой другой точки механизма. и
и  , можем вычислить искомое ускорение
, можем вычислить искомое ускорение  . Величина
. Величина  =
=  +
+  .
.
 =
=  ,
, =
=  .
.