Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип возможных перемещений и общее уравнение динамики.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Принцип возможных перемещений. Эффект связей можно учитывать не только вводя их реакции, но и рассматривая те перемещения, которые точки механической системы могут иметь при наложенных на нее связях. Такой метод позволяет сразу получить уравнение равновесия или движения системы, не содержащие наперед неизвестных реакций связей, что существенно облегчает решение многих задач механики. Эти перемещения называют возможными или виртуальными перемещениями. Они должны быть малыми (элементарными), так как при конечном перемещении система может прийти в положение, где эффект наложенных связей будет другим; быть такими, чтобы все наложенные в данный момент времени на систему связи сохранились, иначе может измениться вид рассматриваемой механической системы. Следует различать действительное элементарное перемещение Следует отметить также, что число независимых между собой возможных перемещений системы равно ее числу степеней свободы. Обозначим равнодействующие всех(внешних и внутренних) активных сил и реакции связей действующих на некоторую точку системы
Умножаем это равенство скалярно на
Сложив эти равенства по индексу k получим
В случае идеальных связей сумма работ их реакций на любом возможном перемещений равна нулю, т.е.
которое характеризует принцип возможных перемещений: для равновесия механической системы с иральными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на нее активных сил при любом возможном перемещении системы была равна нулю. Уравнение (4.54) можно записать в аналитической форме
Равенства (4.54) и (4.55) часто называют общим уравнением статики.
Принцип Даламбера – Лагранжа Принцип возможных перемещений дает общий метод решения задач статики, а принцип Даламбера позволяет использовать методы статики для решения задач динамики. Следовательно, применяя эти два принципа одновременно мы можем получить общий метод решения задачи динамики. Согласно принципу Даламбера система активных сил
Но поскольку связи идеальные и
Равенство (4.56) выражает принцип Даламбера – Лагранжа, при движении механической системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещений системы будет равна нулю. В аналитической форме уравнение (4.56) имеет вид
Уравнение (4.56) и (4.57) называют общим уравнением динамики.
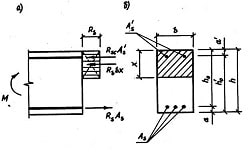
Задача Д5 Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3-6, прикрепленных к этим нитям, и невесомого блока (рис. Д5.0 – Д5.9, табл. Д5). Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом М, приложенной к одному из шкивов. Радиусы ступеней шкива 1 равны: Пренебрегая трением, определить ускорение груза, имеющего большой вес; веса Указания. Задача Д5 – на применение к изучению движения системы общего уравнения динамики (принципа Даламбера – Лагранжа). Предварительно надо присоединить к действующим на систему силам соответствующие силы инерции. Учесть при этом, что для однородного тела, вращающегося вокруг своей оси симметрии (шкива), система сил инерции приводится к паре с моментом
Пример Д5. Механическая система (рис. Д5) состоит из обмотанных нитями блока1 радиуса R1 и ступенчатого шкива 2 (радиусы Дано: Определить: ускорение груза 3, пренебрегая трением.

Решение. 1. Рассмотрим движение механической системы, состоящей из тел 1,2,3,4, соединенных нитями. Система имеет одну степень свободы. Связи, наложенные на эту систему, - идеальные. Для определения
Где 2. Изображаем на чертеже активные силы
3. Сообщая системе возможное перемещение и составляя уравнение (1), получим
Выразим все перемещения через
Подставив величины (2) и (4) в уравнение (3), приведем его к виду
Входящие сюда величины
Затем, учтя, что Из полученного в результате уравнения найдем
Вычисления дают следующий ответ:
Вопросы к экзамену
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 942; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.192 (0.006 с.) |

 от виртуальных перемещений. Поэтому возможное перемещение принято обозначать
от виртуальных перемещений. Поэтому возможное перемещение принято обозначать  , при этом δs будет обозначать его модуль
, при этом δs будет обозначать его модуль  , а
, а  - проекции
- проекции  соответственно через
соответственно через  и
и  . В случае равновесия механической системы, когда каждая ее точка находится в равновесии, имеет место равенство
. В случае равновесия механической системы, когда каждая ее точка находится в равновесии, имеет место равенство


 . Тогда окончательно приходим к соотношению
. Тогда окончательно приходим к соотношению (4.54)
(4.54) (4.55)
(4.55) образуют уравновешенную систему сил. Тогда, применяя к этим силам принцип возможных перемещений, получим
образуют уравновешенную систему сил. Тогда, применяя к этим силам принцип возможных перемещений, получим
 , окончательно запишем
, окончательно запишем (4.56)
(4.56) (4.57)
(4.57) а шкива 2
а шкива 2  их радиусы инерции относительно осей вращения равны соответственно
их радиусы инерции относительно осей вращения равны соответственно  и
и 
 шкивов и грузов заданы в таблице в ньютонах. Грузы, веса которых равны нулю, на чертеже не изображать (шкивы 1,2 изображать всегда как части системы).
шкивов и грузов заданы в таблице в ньютонах. Грузы, веса которых равны нулю, на чертеже не изображать (шкивы 1,2 изображать всегда как части системы). где
где  - момент инерции тела относительно оси вращения,
- момент инерции тела относительно оси вращения,  - угловое ускорение тела; направление
- угловое ускорение тела; направление  противоположно направлению
противоположно направлению 











 и
и  , радиус инерции относительно оси вращения
, радиус инерции относительно оси вращения  ), а также из грузов 3 и 4, прикрепленных к этим нитям. Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом М, приложенной к блоку 1.
), а также из грузов 3 и 4, прикрепленных к этим нитям. Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом М, приложенной к блоку 1.
 применим общее уравнение динамики:
применим общее уравнение динамики: (1)
(1) - сумма элементарных работ активных сил;
- сумма элементарных работ активных сил;  - сумма элементарных работ сил инерции.
- сумма элементарных работ сил инерции. и пару сил с моментом М. Задавшись направлением ускорения
и пару сил с моментом М. Задавшись направлением ускорения  и пару сил инерции с моментом
и пару сил инерции с моментом  величины которых равны:
величины которых равны: (2)
(2) (3)
(3) :
: (4)
(4) (5)
(5) и
и  выразим через искомую величину
выразим через искомую величину 
 , приравняем нулю выражение, стоящее в (5) в квадратных скобках.
, приравняем нулю выражение, стоящее в (5) в квадратных скобках.
 . Знак указывает, что ускорение груза 3 и ускорения других тел направлены противоположно показанным на рис. Д10.
. Знак указывает, что ускорение груза 3 и ускорения других тел направлены противоположно показанным на рис. Д10.