Нелинейные системы с одним нелинейным элементом. Описание нелинейных систем дифференциальными уравнениями. Типовые нелинейные звенья и их статические характеристики
Нелинейной называется такая САУ, у которой зависимость между входными и выходными переменными одного или нескольких элементов описывается нелинейными уравнениями.
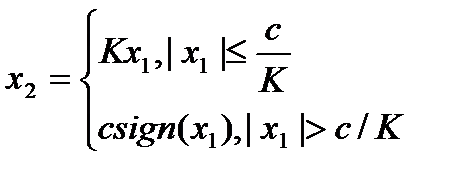
Все реальные элементы и системы, строго говоря нелинейны, и к понятию линейной системы приходят путем линеаризации. Но на практике встречаются такие нелинейные элементы, к которым операция линеаризации по малому отклонению не применима. Такие нелинейности называют существенными. На рис.7.1. приведены примеры таких нелинейностей. На рис.7.1а показана характеристика идеального реле, на рис.7.2б – характеристика с зоной насыщения, на рис.7.1в – нелинейная характеристика типа “модуль”.
Нелинейные системы, по сравнению, с линейными обладают целым рядом особенностей.
Прежде всего, к нелинейным дифференциальным уравнениям не применим принцип суперпозиции. Нелинейные дифференциальные уравнения не имеют каких – либо общих методик решения. Для исследования нелинейных дифференциальных уравнений нельзя использовать аппарат преобразований Лапласа и Фурье.

Судить об устойчивости решений нелинейных дифференциальных уравнений на основании теорем Ляпунова, по дифференциальным уравнениям линеаризованных систем, можно только при малых отклонениях от установившегося движения, т е. можно судить только об устойчивости в малом. Между тем, нелинейная система, устойчивая в малом, может быть неустойчивой при больших отклонениях. Различают, кроме устойчивости в малом, следующие виды устойчивости нелинейных систем. Система называется устойчивой в большом, если она устойчива при больших конечных по величине отклонениях. Система называется устойчивой в целом, если она устойчива при любых, не ограниченных по величине, начальных отклонениях. Если система асимптотически устойчива в целом, то ее называют абсолютно устойчивой.
Особенностью нелинейных систем является возникновение в них, при некоторых начальных условиях, гармонических колебаний с определенной амплитудой и частотой, так называемых предельных циклов. Если предельный цикл устойчив, т.е. к нему сходятся все траектории сверху и снизу в определенном диапазоне начальных условий, то он называется автоколебаниями. Амплитуда и частота автоколебаний зависят только от параметров системы.
|