Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
на участках маневра возврата и крейсерского полетаСодержание книги
Поиск на нашем сайте
Рассмотрим особенности формирования программных функций на участке маневра возврата КРБ. Как видно из схемы полёта, приведенной на рис. В.2, он состоит из нескольких фаз. Первой фазой является безатмосферный полёт в процессе которого устанавливаются в рабочее положение аэродинамические поверхности КРБ, например, раскрывается сложенное вдоль корпуса крыло. В конце первой фазы, перед входом в плотные слои атмосферы (угол тангажа -25÷-27 град), КРБ с помощью РСУ стабилизируется под углом атаки 40-45 град для эффективного торможения и рассеивания тепла. На второй фазе производится выход из пикирования, в процессе которого угол тангажа уменьшается до -7÷-10 град. При этом должно выдерживаться ограничение по нормальной перегрузке путём соответствующего изменения угла атаки. Следующей фазой является пространственное маневрирование в горизонтальной плоскости с целью разворота КРБ в направлении точки старта. Маневрирование производится путём управления углом крена, обеспечивающего перераспределение вертикальной и боковой составляющих пространственного угла атаки, Заключительной фазой является снижение по «плоской» траектории на режиме максимального аэродинамического качества с нулевым углом крена до высоты, обеспечивающей запуск ВРД. Определение программ управления, обеспечивающих энергетически-оптимальный пространственный полет в атмосфере, относится к числу наиболее сложных задач прикладной теории оптимизации. Решение этой задачи основано на определении оптимальных программ управления методами вариационного исчисления, например, с помощью принципа максимума Понтрягина или прямых методов оптимизации. Трудности использования этих методов нарастают по мере усложнения математических моделей, которое в свою очередь обусловлено необходимостью учета особенностей аэродинамической схемы ЛА, параметров внешней среды и пр. Перспективность применения методов прямой оптимизации повышается с увеличением количества и «жесткости» составляющих вектора эксплуатационных ограничений, уменьшающих область существования программ управления. В этой связи при наличии достаточно сложных математических моделей, необходимых для обеспечения приемлемой точности проектных расчетов, гарантирующих адекватность получаемых результатов для нахождения рациональных программ управления движением центра масс КРБ на участке маневра возврата, целесообразно применять методы второй группы и, в частности, метод последовательной оптимизации. В отличие от достаточно короткого (несколько сот секунд) участка введения с детерминированными по времени программами управления углом атаки или тангажа, участок манёвра возврата не имеет жесткой временной привязки. Поэтому в качестве аргумента при задании программ управления целесообразно использовать число Маха. Методика формирования программы управления в процессе расчёта траектории на участке манёвра возврата, основана на совместном использовании опорной т.е. без учета ограничений по перегрузке и скоростному напору программы управления углом атаки в функции числа Маха и линейного автомата стабилизации, обеспечивающего корректировку программного угла атаки в соответствии с существующим комплексом ограничений. Как видно из рис. 13, даже без учета ограничений по перегрузке и скоростному напору опорная программа может быть реализована в достаточно узком диапазоне изменения параметра Из теории оптимального управления известно, что в случае наличия ограничений оптимальная программа реализуется путём движения вдоль границы, что позволяет однозначно определить величину угла атаки на изоперегрузочном участке полёта, продолжительность которого составляет 40-75 % всего диапазона изменения числа Маха. Учёт ограничения производится путем введения обратной связи по нормальной перегрузке. При текущее значение угла атаки в процессе полета на i-м шаге интегрирования определяется исходя из условия
где
Управление пространственным движением центра масс КРБ, после окончания режима выдерживания нормальной перегрузки, достигается за счет перераспределения вертикальной и боковой составляющих вектора подъемной силы КРБ ориентированного относительно вектора скорости под пространственным углом атаки, определяемым по формуле (37). При этом вертикальная составляющая подъёмной силы, пропорциональная sin ɤ, поддерживает режим квазистационарного планирования (
где
Рис. 13 Программы управления КРБ на участке манёвра возврата Для оценки маневренных возможностей КРБ значительный интерес представляет определение размеров и схемы расположения зоны досягаемости, зависящих от начальной скорости полёта. Для фиксированного значения скорости отделения КРБ граница зоны досягаемости (точек посадки КРБ в планирующем полёте) определяется путём варьирования величины конечного значения курсового угла (рис.14).
Рис. 14 Зависимость изменения размеров и схемы расположения зоны досягаемости от начальной скорости полёта КРБ.
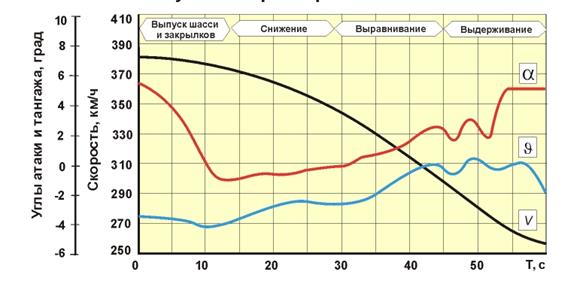
Заключительным этапом является участок крейсерского полёта КРБ с помощью ВРДУ, заканчивающийся посадкой на аэродроме вблизи старта. Для моделирования крейсерского полета КРБ используется следующая приближенная методика управления движением центра масс. Полет представляется в виде последовательности типовых участков, соответствующих отдельным операциям: запуск ВРДУ, полет по маршруту на заданную дальность, снижение, выпуск шасси и закрылков, выравнивание, выдерживание, пробег по ВПП. Режим функционирования КРБ на каждом из участков задается с помощью набора управляющих параметров, описывающих реализуемую программу полета, эксплуатационные ограничения, режимы работы ВРДУ и автомата стабилизации, положение шасси и взлетно-посадочной механизации крыла, признак перехода к отработке следующей типовой операции, шаг интегрирования уравнений движения и печати результатов счета. Возможный вариант формы задания управляющих параметров, отработанный в процессе моделирования крейсерского полета КРБ и реализующий представленную выше методику, приведен в табл. 6, а результаты моделирования конечной фазы крейсерского полёта на рис.15.
Форма задания управляющих параметров КАУ при моделировании полета ЛА с ВРД Таблица. 6
где: № вар – вариант участка полета, определяющий выбор модели движения: 0-окончание полета, 1-разбег, 2-крейсерский полет, 3-предпосадочное маневрирование, 10-пробег по ВПП; Шаг инт – шаг интегрирования на участке полета, с; № кон – признак перехода к выбору следующего участка: 1- по времени, 2- по высоте ( Ркон – физическая величина (настройка) параметра, определяемого по п.3;
№ ас – режим работы автомата стабилизации: 1- программное управление углом атаки, 2- стабилизация угла тангажа путем изменения угла атаки по закону:
Аэр1, Аэр2- варианты аэродинамической конфигурации КРБ: 1- полетная конфигурация, 2- посадочная (шасси выпущены, закрылки в посадочном положении);
Шаг печ – шаг выдачи результатов счета на участке полета.
Моделирование крейсерского полета КРБ показывает, что использование методики программирования движения с помощью типовых операций обеспечивает отработку практически любой программы полета с учетом эксплуатационных ограничений, особенностей режимов работы ВРДУ и аэродинамических характеристик ЛА.
Рис. 15 Результаты моделирования конечной фазы крейсерского полёта КРБ
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 204; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.64 (0.006 с.) |

 . Анализ особенностей аэродинамики гиперзвуковых ЛА показывает, что существует целый ряд ограничений, сужающих диапазон балансировочных углов атаки. В частности, при М > 1 он ограничен «снизу» недостаточной путевой устойчивостью, характерной для сверх и гиперзвуковых ЛА на малых углах атаки. В трансзвуковой области на первый план выдвигается ограничение на максимальное значение коэффициента подъемной силы, связанное с возникновением скоростного баффтинга, обусловленного появлением местных сверхзвуковых зон и нестационарных отрывных течений, сопровождающимся генерированием значительных знакопеременных моментов и сил.
. Анализ особенностей аэродинамики гиперзвуковых ЛА показывает, что существует целый ряд ограничений, сужающих диапазон балансировочных углов атаки. В частности, при М > 1 он ограничен «снизу» недостаточной путевой устойчивостью, характерной для сверх и гиперзвуковых ЛА на малых углах атаки. В трансзвуковой области на первый план выдвигается ограничение на максимальное значение коэффициента подъемной силы, связанное с возникновением скоростного баффтинга, обусловленного появлением местных сверхзвуковых зон и нестационарных отрывных течений, сопровождающимся генерированием значительных знакопеременных моментов и сил.
 (37)
(37) - программный угол атаки, определяемый опорной программой управления
- программный угол атаки, определяемый опорной программой управления  , задаваемой без учета ограничений по перегрузке (рис.4.11);
, задаваемой без учета ограничений по перегрузке (рис.4.11); - значение угла атаки, рассчитанное по алгоритмам автомата стабилизации;
- значение угла атаки, рассчитанное по алгоритмам автомата стабилизации; - значение угла атаки, на предыдущем (i-1), обращении к модели КАУ;
- значение угла атаки, на предыдущем (i-1), обращении к модели КАУ; - текущее значение нормальной перегрузки;
- текущее значение нормальной перегрузки; - максимально допустимая величина нормальной перегрузки;
- максимально допустимая величина нормальной перегрузки; - коэффициент усиления (при
- коэффициент усиления (при  5 град/с, -
5 град/с, -  ), а боковая составляющая подъёмной силы обеспечивает пространственное маневрирование путём разворота вектора относительной скорости в горизонтальной плоскости. Алгоритм формирования моделью автомата стабилизации командного угла по каналу крена на основе линейных функций, с использованием в качестве параметров обратной связи текущего значения угла тангажа и скоростного напора реализуется следующим образом:
), а боковая составляющая подъёмной силы обеспечивает пространственное маневрирование путём разворота вектора относительной скорости в горизонтальной плоскости. Алгоритм формирования моделью автомата стабилизации командного угла по каналу крена на основе линейных функций, с использованием в качестве параметров обратной связи текущего значения угла тангажа и скоростного напора реализуется следующим образом: (38)
(38) - время достижения апогея баллистической траектории;
- время достижения апогея баллистической траектории; - время достижения расчетного значения угла тангажа и начала режима квазистационарного планирования;
- время достижения расчетного значения угла тангажа и начала режима квазистационарного планирования; - текущее значение угла тангажа и скоростного напора;
- текущее значение угла тангажа и скоростного напора; - значение скоростного напора на предыдущем обращении к алгоритмам АС;
- значение скоростного напора на предыдущем обращении к алгоритмам АС; - угол тангажа (угол наклона вектора скорости к плоскости местного горизонта), выдерживаемый на режиме квазистационарного планирования, величина которого составляет -7÷-10 град;
- угол тангажа (угол наклона вектора скорости к плоскости местного горизонта), выдерживаемый на режиме квазистационарного планирования, величина которого составляет -7÷-10 град; - зона нечуствительности АС по тангажу;
- зона нечуствительности АС по тангажу; - коэффициенты усиления АС по тангажу и скоростному напору (при
- коэффициенты усиления АС по тангажу и скоростному напору (при  соответственно: 2-5 и 0.03-0.05 град м2/кг);
соответственно: 2-5 и 0.03-0.05 град м2/кг); - конечное значение курсового угла (
- конечное значение курсового угла ( ).
).







 ), 3- по высоте (
), 3- по высоте ( ), 4- по дальности (
), 4- по дальности ( ), 5– по полетному весу (
), 5– по полетному весу ( ), 6- по скорости (
), 6- по скорости ( ), 7- по скорости (
), 7- по скорости ( ), 9- по скоростному напору (
), 9- по скоростному напору ( );
); ,
,  - начальное и конечное значения управляющего параметра, например, угла атаки или тангажа, на выбранном участке полета. При
- начальное и конечное значения управляющего параметра, например, угла атаки или тангажа, на выбранном участке полета. При  текущее значение параметра изменяется по линейному закону за время
текущее значение параметра изменяется по линейному закону за время  ;
; , при этом параметры
, при этом параметры  используются для ограничения диапазона изменения угла атаки, 3- программное управление высотой полета, отрабатываемое автоматом стабилизации путем изменения угла атаки, 4- программное управление числом Маха, отрабатываемое автоматом стабилизации путем дросселирования тяги ДУ, 5- программное управление скоростным напором, отрабатываемое автоматом стабилизации путем изменения угла атаки,
используются для ограничения диапазона изменения угла атаки, 3- программное управление высотой полета, отрабатываемое автоматом стабилизации путем изменения угла атаки, 4- программное управление числом Маха, отрабатываемое автоматом стабилизации путем дросселирования тяги ДУ, 5- программное управление скоростным напором, отрабатываемое автоматом стабилизации путем изменения угла атаки, - время линейного изменения управляющего параметра;
- время линейного изменения управляющего параметра; ,
,  - начальное и конечное значения режима работы ДУ на выбранном участке полета. При
- начальное и конечное значения режима работы ДУ на выбранном участке полета. При  текущее значение параметра изменяется по линейному закону за время
текущее значение параметра изменяется по линейному закону за время  - коэффициент усиления автомата стабилизации;
- коэффициент усиления автомата стабилизации;