
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Движения. Основные задачи динамикиСодержание книги
Поиск на нашем сайте Пусть свободная материальная точка массой m движется по
P 1,
P 2, …,
P n. Тогда согласно
m a = å P i = R. (2.1) Так как a = , тогда получим дифференциальное уравнение движения
материальной точки в векторной форме:
  d 2 r d 2 r
m dt 2 = R. (2.2) Спроецируем уравнение (2.1) на декартовы оси координат (рисунок 2.1):
ma x = R x; ma y = R y;
ma z = R z.
Так как a x = dt 2 = x; a y = dt 2 = y; a z = dt 2 = z, тогда получим дифференциальные уравнения движения материальной точки в декартовой системе координат:
ma t = R t ; ma n = R n ; ma b = R b .
Так как a t = dt; a n = r ; a b = 0,
Рисунок 2.1 тогда получим дифференциальные уравнения движения материальной точки в естественной системе координат: ì m du = R; ï dt
ï t = R n;
(2.4) ï0 = R. ï b î
Первая (прямая) задача динамики Зная массу и закон движения объекта (точка, тело, система тел) определить модуль и направление равнодействующей сил, вызывающих это движение. Дано: m; x = f 1 (t); y = f 2 (t); z = f 3 (t) .
Определить: R.
Направление вектора R определяется направляющими косинусами:
cos a = cos a = R x
=
.
R x, град.;
R y, град.;
R z, град.
Вторая (обратная) задача динамики
Зная массу и силы, действующие на объект, а также начальные условия, определить закон его движения. Дано: m; R. Определить: x = f 1 (t); y = f 2 (t); z = f 3 (t) .
Сила может быть постоянна по модулю и направлению или быть
R = f (t, r, u) (времени, положения Проинтегрировав дважды полученные дифференциальные уравнения (2.5) и определив постоянные интегрирования (C 1, C 2, …, C n), получим кинематические уравнения движения материальной точки – x = f 1 (t); y = f 2 (t); z = f 3 (t). Интегрирование дифференциальных уравнений прямолинейного движения Условие прямолинейности движения Движение материальной точки будет прямолинейным, когда действующая на нее сила (или равнодействующая приложенных сил) имеет постоянное направление, а скорость точки в начальный момент времени равна нулю или направлена вдоль силы.
1. (сила тяжести вблизи поверхности земли)
m du = P;
d u = P dt;
ò d u = P ò dt.
(u ) m (t)
2. f (t) (силы, при работе машин или механизмов)
m du = P (t);
d u = P ( t ) dt; ò d u = 1 ò P (t) dt.
(u ) m (t)
3. P = f (x, y, z) (сила тяготения, сила упругости)
К примеру, в проекции на ось x: m d u x
= P x (x). Умножив полученное равенство на dx получим: m d u x dx = P (x) dx;
m u d u = P (x) dx; u d u = P x (x) dx;
dt x x x x x x m ò (u ) u x d u x = 1
P x (x) dx.
4. f (u) (силы сопротивления среды)
m du = P (u ); du = dt;
ò du = 1
ò dt.
(u ) P (u ) m (t)
|
|||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 630; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.005 с.) |




 dt 2
dt 2

 d 2 x
d 2 x
 d 2 y
d 2 y
 (2.3)
(2.3)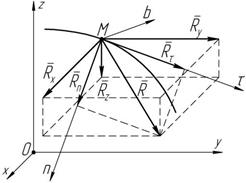 Спроецируем уравнение (2.1) на естественные оси координат (рисунок 2.1):
Спроецируем уравнение (2.1) на естественные оси координат (рисунок 2.1):
 d u u 2
d u u 2

 R = = m .
R = = m . R
R ;
; cos b =
cos b =
 ; cos g = ,
; cos g = , где a – угол между векторами R и
где a – угол между векторами R и b – угол между векторами R и
b – угол между векторами R и




 ; ; . (2.5)
; ; . (2.5) dt m
dt m P =
P =
 dt
dt


 P =
P = ma = P (u);
ma = P (u); dt P (u ) m
dt P (u ) m


