Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматические системы управления электропоездовСодержание книги
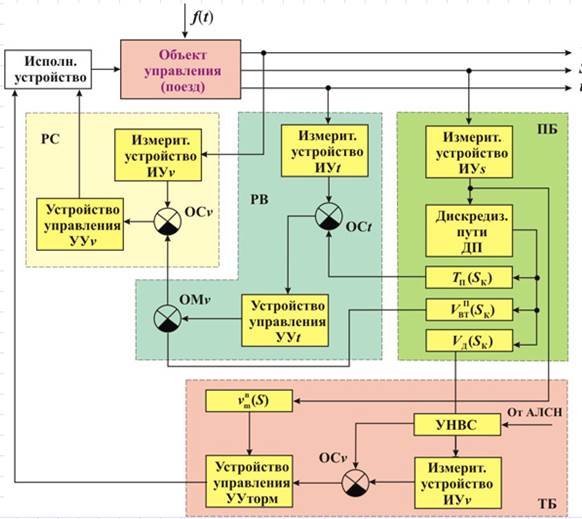
Поиск на нашем сайте Цель работы: - систематизация и обобщение знаний 3-х разделов дисциплины АУЛ «Принципы построения автоматических систем», «Устойчивость и качество работы систем автоматики», «Локомотивные системы автоматического управления, регулирования и защиты»; - уточнение сведений, касающихся принципа построения и работы автоматических систем управления электропоездов. Краткие теоретические сведения. В основном автоматические системы управления электропоездами пригородного сообщения строятся как автономные. Управление движением таких поездов имеет много общего с управлением движением пассажирскими поездами. В автоматических системах управления электропоездами ликвидация рассогласования между плановым и исполненным графиком осуществляется изменениями длительности стоянки и временем хода между пунктами остановок. Длительность стоянки определяет машинист, время хода, - система автоведения. В пригородном сообщении под перегоном понимается время хода от станции до станции, а под контрольным участком – расстояние между остановочными пунктами. Участковое время складывается из перегонных времён. В автоматических системах управления электропоездами могут использоваться следующие законы управления времени хода между остановочными пунктами и, следовательно временем хода по перегону (Tx): по времени движения поезда под тягой Tt = f (Tx), по времени дополнительного движения под тягой TДТ = f (Tx), по скорости в момент перехода на выбег vВТ = f (Tx), по пути движения под тягой St = f (Tx), по средней скорости к моменту выключения тяговых двигателей vC = f (Tx), по уровню заданной скорости vЗ = f (Tx). Рассмотрим структурную схему автоматической системы управления электропоездами (рис. 3), в которой использован закон управления времени хода vВТ = = f (Tx). Это двухконтурная система автоведения, состоящая из объекта управления (электропоезда), исполнительного устройства (ИсУ), программного блока (ПБ), регулятора времени хода, регулятора скорости, тормозного блока (ТБ). Регулятор времени хода, блоки ИсУ, программный и тормозной блоки имеют то же назначение, что и в автоматических системах управления пассажирскими поездами. Регулятор времени хода состоит из измерительного устройства времени ИУ t органа сравнения времени ОС t, управляющего устройства времени УУ t, сумматора скоростей СМ v. Измерительное устройство имеет то же назначение, что в автоматических системах управления пассажирскими поездами. Орган сравнения определяет рассогласование по времени хода в момент отправления поезда со станции или проследования платформы без остановки. Устройство УУ t на основе значений определяет величину коррекции скорости выключения тяговых двигателей Δ v ВТ, которая суммируется в СМ v с её программным значением. Регулятор времени вычисляет значение скорости.
Рисунок 3
Регулятор скорости в данной автоматической системе управления электропоездами не выполняет полностью функции регулирования скорости (является вырожденным регулятором): он предназначен для определения момента равенства измеренной скорости vизм и вычисленной регулятором времени v ВТ. Измеритель скорости и орган сравнения ОС v имеют в данной системе то же назначение, что и в автоматических системах управления пассажирскими поездами. Управляющее устройство УУ v выполняет функции ноль – органа, т.е. определяет момент равенства v ИЗМ и v ВТ. К подобному классу систем можно отнести систему «САВП» разработанную во ВНИИЖТе.
Задание на выполнение лабораторной работы. 1. Раскрыть функциональную взаимосвязь между блоками изображенной на рис. 3 системы автоведения электропоездов. 2. Привести схему пуска привода, соответствующему вышеприведенной системе управления электропоездов. 3. Укажите возможные направления реконструкции рассматриваемой системы. 4. Письменно дать ответы на контрольные вопросы в отчете. Контрольные вопросы. 1. Основные преимущества и недостатки системы автоведения электропоездов. 2. Какой ведущий замысел построения системы? 3. Благодаря каким достижениям НТП удалось достичь повсеместного использования системы? 4. В чем функциональные особенности рассматриваемой системы?
|
||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 173; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.007 с.) |