Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение движущего момента для преодоления сил статического сопротивленияСодержание книги
Поиск на нашем сайте
Из теоремы мощностей можно записать формулу для расчета статического сопротивления:
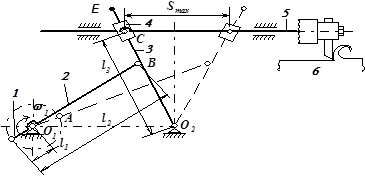
где Fi - сила статического сопротивления, приложенная к i точке механизма; Vi - линейная скорость точки; w1 - угловая скорость кривошипа; В нашем случае формула принимает следующий вид:
Мст= - [G2 . Vd . cos(G2^Vd)/w1+G3 . Vf . cos(G3^Vf)/w1+ +G5 . VС5 . cos(G5^VС5)/w1-Q . VС5/w1];
cos(G5^Vc)=0 во всех положениях, так как скорость Vc всегда перпендикулярна вектору силы тяжести G5. Мст1= - (250*0,025*cos (140°)+0+0-0)=3,83н*м.
Таблица 3. Статический момент
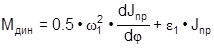
4.2 Определение движущего момента для преодоления сил динамического сопротивления Мдин(j)
Силы инерции, также как и силы статического сопротивления могут быть приведены к кривошипу. Динамический момент найдем по формуле:
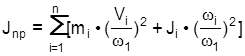
где w1 - угловая скорость кривошипа; е1 - угловое ускорение кривошипа; j - угол поворота кривошипа; Jпр - приведенный момент инерции механизма; Параметр Jпр определяется формулой:
где Vi - скорость полюса i-го звена механизма; wi - угловая скорость i-го звена; Ii - момент инерции относительно полюса i-го звена; n - число звеньев механизма; Так как угловая скорость кривошипа постоянна и не изменяется с течением времени, то угловое ускорение кривошипа равно нулю (е1=0). Тогда формула определения Мдин примет вид:
Где щ1= р*N/30=р*190/30=19,8 рад/с Рассчитаем значения момента инерции для каждого из положения механизма. Запишем формулу определения Iпр в для нашего случая:
где m2 - масса шатуна; m3 - масса кулисы; m5 - масса штанги; l2 и l3 - соответственно длины шатуна и кулисы
Таблица 4. Приведенный момент инерции механизма
Значение первой производной приведенного момента по углу поворота кривошипа можно определить приближенно, используя аппроксимацию первой производной из пособия [1].
где j(i+1),wi, Iпр(i+1), Iпрi - значения угла поворота кривошипа и приведенного момента инерции для i+1 и I положения кривошипа, соответственно.
I’пр2 = (Iпр2 - Iпр1)/(р/6)=0,124кг*мІ/рад
Таблица 5. Первая производная приведенного момента
Рассчитаем динамический момент для каждого из положений кривошипа: Мдин2=0,5*щ1І* I’пр2=24,518н*м.
Таблица 6. Динамический момент
Расчет КПД механизма
Ранее момент движущих сил был определен в предположении, что кинематические пары механизма идеальны. Влияние сил трения учитывается с помощью КПД h. При последовательном соединении кинематических пар их общий КПД определяется следующим выражением:
h=h1*h2*… *hm
При параллельном соединении кинематических пар КПД определяется как произведение передаваемой работы данной кинематической паре и ее КПД деленное на общую передаваемую работу.
h=å((Аk*hk)/A);
Если работа распределяется равномерно, то формула принимает следующий вид:
h=åhk/k;
Выражение КПД получим с учетом следующих факторов: 1) В опоре кривошипа установлено два подшипника качения, которые работают параллельно. 2) Подшипники качения кривошипа и подшипник качения, соединяющий кривошип с шатуном, соединены последовательно. 3) Два подшипника качения образующие пару, в опоре кулисы установлены параллельно. 4) Два подшипника качения, установленные в месте соединения шатуна и кулисы, ползуна и штанги, установлены последовательно. 5) Ползун по направляющей, установлен последовательно.
Кинематическая схема для определения КПД механизма
Тогда выражение для КПД примет вид:
h=hс*hс*hк*hс*hк*hпн
где hк=0.99 - КПД подшипника качения hс=0,98 - КПД подшипника скольжения hпн=0.86-КПД кинематической пары «ползун по направляющей» Вычислим КПД по приведенной формуле h=0,98і * 0,99І * 0,86=0,79
4.4 Расчет движущего момента М å (j)
Выражение для Мå с учетом сил трения примет вид: Мå=k. (Мст+Мдин);
где k - коэффициент, учитывающий силы трения в подшипниках; Причем k=h, когда (Мст+Мдин)<0 - работа привода в режиме генератора, играющего роль тормоза.
k=1/h, когда (Мст+Мдин)>0 - работа в режиме двигателя. Мå1=к*(Мст1+Мдин1)=1,26*(9,45+24,518)=42,997.
Таблица 7. Суммарный момент
5. В ы бор редуктора
Для передачи крутящего момента от к исполнительному механизму необходимо только жесткое соединение валов. Однако скорости вращения электродвигателей в режиме с наибольшим КПД сравнительно велики по отношению к скоростям вращения приводных валов исполнительных механизмов, поэтому для передачи усилия используют редукторы. Исходными данными для выбора редуктора являются: · номинальный момент Мн; · режим работы; · характер нагрузки; · число оборотов быстроходного вала; · расчетное передаточное число редуктора; Расчетный момент определяется по формуле:
Мp=k1.k2.Мн;
где k1 - коэффициент, который отражает отличие в угловых скоростях быстроходного и тихоходного валов; k2 - коэффициент который отражает влияние характера нагрузки; Мн - номинальный момент (момент постоянный по величине, который в течение одного цикла совершит туже работу, что и реальный переменный момент. По графику Мå(j) определяем, что характер нагрузки соответствует сильным толчкам, поэтому коэффициенты возьмем равными: k1=1 (т.к. n дв< 1500 об/мин) k2=1.6 Номинальный момент определяем по формуле
Из графика определяем, что Мн=122 Нм. Тогда Мр=1.6.1. 122=195,2 Нм. Найдем передаточное число в зубчатой передаче. Если учитывать что в зубчатом зацеплении проскальзывание одного колеса редуктора относительно другого отсутствует, передаточное число будет равно передаточному отношению:
i=U=nдв/n1 U=680/190=3.5
где nдв -частота вращения вала двигателя; n1 - число оборотов кривошипа; По расчетному моменту и передаточному числу выбираем косозубый редуктор МЦ -100. Крутящий момент которого на тихоходном валу равен Т=230 Нм Рассчитаем погрешность для передаточного числа
d=(i - u)/u.100%=(3.5-3.2)/3.5.100=8%
Параметры и габаритные размеры редуктора МЦ-100 приведены в Таблице 8. В Таблице 9 приведены размеры подшипника 7308. Определим относительную погрешность крутящего момента редуктора:
dT=(Tр-Tтаб)/Tp=(230-229,6)/229,6=0.002=0,2%
Такие погрешности допустимы т. к. условия работоспособности не будет нарушены. Таблица 8. Значения эксплуатационных и конструктивных параметров редуктора МЦ-100
Таблица 9. Размеры роликового конического однорядного подшипника 7308
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-20; просмотров: 194; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.195 (0.008 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




 кг*мІ
кг*мІ