Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет электродинамических усилий с использованием законаБио-Савара-ЛапласаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Согласно этому методу для определения величины и направления электродинамического усилия должно быть рассмотрено взаимодействие тока одного проводника с потоком магнитной индукции от тока другого проводника (рис. 2.4.1). Условимся обозначать длину первого проводника буквой l, а длину второго проводника — буквой L. Элементарное усилие
В соответствии с рис. 2.4.1 для подстановки в формулу (2.4.1) в первую очередь необходимо определить индукцию, созданную током I 2 в области тока I 1. Задачу можно упростить, считая проводники бесконечно тонкими (рис. 2.4.3). В этом случае потребуется определить индукцию в точке, лежащей на проводнике. В соответствии с законом Био-Савара-Лапласа, при отсутствии ферромагнитных сред, участок проводника
где
d где dL - длина вектора d 1 - длина вектора
Направление вектора магнитной индукции можно определить по правилу правой руки: если четыре согнутых пальца правой руки поворачивать по направлению концентрических линий магнитной индукции, отогнутый на 90 градусов большой палец укажет направление тока, создавшего этот магнитный поток. Это же правило в другом виде: если при вращении правого винта он перемещается в направлении тока в проводнике, линии магнитной индукции, наведенной этим током, направлены по вращению винта. В соответствии с двумя последними правилами вектор магнитной индукции справа от проводника с током I 2 направлен вниз, а слева от него - вверх (рис. 2.4.1). Вычислив векторное произведение, можно записать формулу для определения вектора магнитной индукции в точке, расположенной на проводнике с током I 1:
Интегрирование удобно вести не по длине L, а по углу а. Для этого выразим L и R через расстояние между проводниками а и угол α:
Произведя подстановку в формулу (2.4.3), получим:
При изменении длины проводника от - ∞ до +∞, угол α будет меняться от 0° до 180°. Подставив эти пределы интегрирования в формулу (2.4.4),получим:
Полученный результат в точности соответствует закону полного тока: циркуляция вектора магнитной индукции вдоль замкнутого контура длиной 2‧π‧ а численно равна току, охваченному этим контуром:
Получив результат (2.4.5), можно вывести формулу для определения силы, действующей наточку проводника с током I 1. В соответствии с (2.4.1) это:
где Проинтегрировав элементарное усилие d
Модуль этой силы принято записывать в виде
Где 10-7= Этот коэффициент учитывает форму сечения проводов и их взаимное расположение в пространстве. В рассмотренном случае бесконечно тонкого проводника длиной l этот коэффициент равен Электродинамические усилия, возникающие в условиях короткого замыкания, достигают значительных величин и оказываются способны деформировать детали электрических аппаратов. Поэтому все аппараты и токопроводящие конструктивные элементы должны проверяться на электродинамическую устойчивость. Под электродинамической устойчивостью аппарата или элемента конструкции понимают способность выдерживать без повреждений электродинамические силы, возникающие при протекании тока короткого замыкания. Примеры решения задач Пример 1. Определить величину электродинамического усилия, действующего на участок проводника длиной l =3мс током I 1=10 кА, находящийся в поле бесконечного проводника с током I 2=15 кА. Проводники лежат в одной плоскости на расстоянии а =2 м друг от друга. Коэффициент контура электродинамических усилий для заданногорасположения проводников равен
Ответ: F= 45 Н.
Пример2. Определить величину и направление силы, действующей на горизонтальную часть проводника, изображенного на рис. 2.4.4. Ток в проводнике равен I = 10 кА, длина вертикальной части h =1 м, длина горизонтальной части а = 0,5 м. Проводник круглый, диаметром d = 30 мм. Формула для определения коэффициента контура согласно таблице приложения П.2 имеет вид:
где ρ - радиус проводника, м. Подставляя числовые значения в формулу (2.4.10), получим:
Определяя модуль и направление силы, действующей на горизонтальную часть проводника, необходимо учесть, что эта сила есть результат взаимодействия тока горизонтальной части с потоком от тока вертикальной части проводника. Поэтому ток проводника войдет в формулу (2.4.9) дважды: F =10-7‧104‧104‧3,45=34,5H. Для определения направления действия силы необходимо, в первую очередь, определить направление вектора магнитной индукции в области тока горизонтальной части проводника. Для этого необходимо воспользоваться правилом правоговинта. На рис. 2.4.5 показано, что, согласно этому правилу, концентрическиелинии магнитной индукции справа от вертикальной части направленык наблюдателю. Значит, для определения направления электродинамического усилия, возникающего в горизонтальной части проводника необходимо расположить ладонь левой руки к рис. 2.4.5, а четыре пальца направить вправо. Отогнутый на 90 градусов большой палец укажет вниз. Ответ: F= 34,5Н, направление действия электродинамической силы указано на рис. 2.4.5. Пример 3. Определить величину и направление силы, действующей на половинувитка из проволоки диаметром 4 мм. Радиус витка R = 3 см, ток, протекающий в витке I = 100 А. Рассмотрим взаимодействие тока, текущего в правой половине витка с потоком от тока, текущего в левой половине витка. Коэффициент контура электродинамических усилий для заданной конфигурации проводника равен:
где ρ - радиус проводника. Подставив численные значения, получим
Теперь, используя формулу (2.4.9), можно определить модуль силы, действующей на правую половину витка: F = 10-7‧100‧100‧ 4,037 = 4,037‧ 10-3 Н.
Ответ: F =4,037‧10-3Н, направление действия электродинамической силы указано на рис. 2.4.7. Выводы и обобщения В первом рассмотренном примере в результате расчета было получено значение электродинамической силы 45 Н, а в третьем 4,037‧10-3Н. Величины отличаются на несколько порядков. Но можно ли в этой связи считать второй результат несущественным по сравнению с первым? И как оценить полученные в результате расчета значения? Соотнесем рассмотренные примеры с положениями теории. Положение первое: на электродинамическую устойчивость рассчитываются шинопроводы, изоляторы крепления токопроводов, рубильники, разъединители, контактные соединения, монтажные соединения и другое оборудование. То, что такой расчет необходим, подтверждает уже первый рассмотренный пример. Из него следует, что если уменьшить расстояние между проводниками в двадцать раз (до 10 см), усилие возрастет в двадцать раз (до 900 Н). Такой расчет не очень точен, поскольку при уменьшении расстояния между проводниками их нельзя будет считать бесконечно тонкими и потребуется учитывать коэффициент формы шин. Но уточненный расчет даст тот же порядок цифр и для качественного прогнозирования последствий возникновения электродинамического усилия можно в качестве исходного принять значение 900 Н. Предположим, что заданный в первом примере ток короткого замыкания 10 кА пропускает медная шина с размерами а × b = 5 × 20 мм2. При длительности режима 3 с и начальной температуре 20 °С шина не нагреется свыше допустимых 300 °С. То есть проверку на термическую устойчивость для данных условий такая шина пройдет. Выясним, не возникнут ли в ней остаточные деформации, обусловленные действием электродинамической силы. Для этого сравним возникающее в шине механическое напряжение с допустимым напряжением на изгиб (для меди σдоп= 137‧106 Па). Если считать, что шина закреплена на концах трехметрового участка, можно ее рассматривать как балку на двух опорах. Для такой конфигурации напряжение на изгиб будет равно:
Подставляя в формулу (2.4.12) числовые значения, получим напряжение, возникающее в шине:
Это значение почти в 30 раз превышает допустимую величину, следовательно, деформация конструкции при коротком замыкании выйдет за пределы эластичных свойств материала, в результате чего возникнет остаточная деформация шины или разрушение ее крепления. Чтобы этого не произошло должно быть увеличено расстояние между шинами, либо шина должна быть закреплена через каждые 10 см, либо должны быть изменены размеры ее сечения. Понятие электродинамической устойчивости в отношении коммутирующих контактов имеет отличие от определения, приведенного выше. В данном случае это способность пропускать большие токи, не размыкаясь под действием электродинамических усилий и не снижая значительно
|
||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 731; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.111 (0.008 с.) |

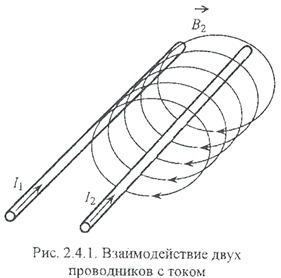 Рассмотрим два проводника с током, расположенные в одной плоскости параллельно друг другу. Посредством магнитного поля, возникающего вокруг каждого проводника, они взаимодействуют между собой. При одинаковом направлении тока в проводникахрезультатом взаимодействия является сила, притягивающая один проводник к другому. Одним из методов расчета силы электродинамического взаимодействия является метод, основанный на применении закона Био-Савара-Лапласа.
Рассмотрим два проводника с током, расположенные в одной плоскости параллельно друг другу. Посредством магнитного поля, возникающего вокруг каждого проводника, они взаимодействуют между собой. При одинаковом направлении тока в проводникахрезультатом взаимодействия является сила, притягивающая один проводник к другому. Одним из методов расчета силы электродинамического взаимодействия является метод, основанный на применении закона Био-Савара-Лапласа. , действующее на элементарный проводник
, действующее на элементарный проводник  зависит от тока I 1 протекающего в этом проводнике, его длины и магнитной индукции
зависит от тока I 1 протекающего в этом проводнике, его длины и магнитной индукции  , пронизывающей проводник:
, пронизывающей проводник: Векторное произведение
Векторное произведение  Для определения направления действия электродинамического усилия служит, также, мнемоническое правило левой руки: если левую руку расположить так, чтобы линии магнитной индукции входили в ладонь, а четыре вытянутых пальца были направлены по току в проводнике, отогнутый на 90 градусов большой палец укажет направление силы взаимодействия тока с магнитным потоком.
Для определения направления действия электродинамического усилия служит, также, мнемоническое правило левой руки: если левую руку расположить так, чтобы линии магнитной индукции входили в ладонь, а четыре вытянутых пальца были направлены по току в проводнике, отогнутый на 90 градусов большой палец укажет направление силы взаимодействия тока с магнитным потоком. , по которому течет ток I 2, создает магнитную индукцию d
, по которому течет ток I 2, создает магнитную индукцию d 
 - единичный вектор, проведенный от d
- единичный вектор, проведенный от d  к точке, в которой определяется магнитная индукция (рис. 2.4.3).
к точке, в которой определяется магнитная индукция (рис. 2.4.3).  Сначала вычислим векторное произведение d
Сначала вычислим векторное произведение d  20‧ dL ‧1‧sin α
20‧ dL ‧1‧sin α





 l0- единичный вектор, направление которого определяется по правилувекторного произведения (см. комментарии к формуле (2.4.1)).
l0- единичный вектор, направление которого определяется по правилувекторного произведения (см. комментарии к формуле (2.4.1)).

 , а k – коэффициент контура электродинамических усилий.
, а k – коэффициент контура электродинамических усилий. . Для иной конфигурациикоэффициент контура может быть определен согласно изложенной методике или вычислен по готовой формуле, приведенной в таблице приложения П. 2.
. Для иной конфигурациикоэффициент контура может быть определен согласно изложенной методике или вычислен по готовой формуле, приведенной в таблице приложения П. 2. численные значения в формулу (2.4.9), получим:
численные значения в формулу (2.4.9), получим:




 Направление действия электродинамического усилия может быть определено аналогично тому, как это было сделано во втором примере. Еслиток в витке направить против часовой стрелки, линии магнитной индукции, наведенной током левой части витка в области его правой части, будут направлены к наблюдателю (рис. 2.4.7). Расположив ладонь левой руки внутренней стороной к рисунку и направив четыре пальца этой ладони по току в правой части витка, получим направление электродинамической силы. Это направление таково, что сила стремится отделить одну половину витка от другой.
Направление действия электродинамического усилия может быть определено аналогично тому, как это было сделано во втором примере. Еслиток в витке направить против часовой стрелки, линии магнитной индукции, наведенной током левой части витка в области его правой части, будут направлены к наблюдателю (рис. 2.4.7). Расположив ладонь левой руки внутренней стороной к рисунку и направив четыре пальца этой ладони по току в правой части витка, получим направление электродинамической силы. Это направление таково, что сила стремится отделить одну половину витка от другой.

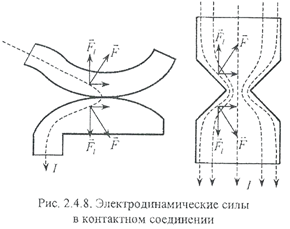 контактного нажатия. Если рассмотреть линии тока, проходящие через место контактирования (рис. 2.4.8), можно видеть, что сила, действующая на них, имеет осевую составляющую
контактного нажатия. Если рассмотреть линии тока, проходящие через место контактирования (рис. 2.4.8), можно видеть, что сила, действующая на них, имеет осевую составляющую