
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Связи и реакции связей. Определение направления реакций связейСодержание книги
Поиск на нашем сайте Вопрос 1 Аксиомы статики
Третья аксиома. Не нарушая механического состояния тела, можно добавить или убрать уравновешенную систему сил (принцип отбрасывания системы сил, эквивалентной нулю)
Вместо параллелограмма можно построить треугольник сил: силы вычерчивают одну за другой в любом порядке; равнодействующая двух сил соединяет начало первой силы с концом второй.
Силы действующие и противодействующие всегда приложены к разным телам, поэтому они не уравновешиваются. Силы, с которыми два тела действуют друг на друга, всегда равны по модулю и направлены вдоль одной прямой в разные стороны. Вопрос 2 Связи и реакции связей. Определение направления реакций связей Законы и теоремы статики справедливы для свободного твердого тела. Все тела делятся на свободные и связанные. Свободные тела — тела, перемещение которых не ограничено. Связанные тела — тела, перемещение которых ограничено другими телами. Тела, ограничивающие перемещение других тел, называют связями. Силы, действующие от связей и препятствующие перемещению, называют реакциями связей.
Все связи можно разделить на несколько типов. Связь — гладкая опора (без трения). Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре.
Жесткий стержень. На схемах стержни изображают толстой сплошной линией. Стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня..
Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки). Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т. к. не допускается только перемещение поперек опорной поверхности.
Защемление или «заделка». Любые перемещения точки крепления невозможны. Под действием внешних сил в опоре возникают реактивная сила и реактивный момент МR, препятствующий повороту Реактивную силу принято представлять в виде двух составляющих вдоль осей координат R = Rx + Ry Вопрос 3 Вопрос 4
Вектор равнодействующей направлен навстречу векторам сил слагаемых. Такой способ получения равнодействующей называют геометрическим. Порядок построения многоугольника сил: Вычертить векторы сил заданной системы в некотором масштабе один за другим так, чтобы конец предыдущего вектора совпадал с началом последующего. Вектор равнодействующей замыкает полученную ломаную линию; он соединяет начало первого вектора с концом последнего и направлен ему навстречу. Условие равновесия плоской системы сходящихся сил. При равновесии системы сил равнодействующая должна быть равна нулю, следовательно, при геометрическом построении конец Последнего вектора должен совпасть с началом первого. Вопрос 5 Условия равновесия
Исходя из того, что равнодействующая равна нулю, получим: Условия равновесия в аналитической форме можно сформулировать следующим образом: Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
В задачах координатные оси выбирают так, чтобы решение было наиболее простым. Желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат. Вопрос 7 Вопрос 8 Вопрос 9 Вопрос 10 Вопрос 12
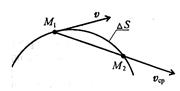
Векторная величина, характеризующая в данный момент быстроту и направление движения по траектории, называется скоростью. Скорость — вектор, в любой момент времени направленный по касательной к траектории в сторону направления движения. Если точка за равные промежутки времени проходит равные расстояния, то движение называют равномерным. Средняя скорость на пути AS определяется как
где ΔS — пройденный путь за время Δt; Δt — промежуток времени.
Если точка за равные промежутки времени проходит неравные пути, то движение называют неравномерным. В этом случае скорость — величина переменная и зависит от времени v = f (t). При рассмотрении малых промежутков времени (Δt → 0) средняя скорость становится равной истинной скорости движения в данный момент. Поэтому скорость в данный момент определяют как производную пути по времени:
За единицу скорости принимают 1 м/с. Иногда скорость измеряют в км/ч, 1км/ч = 0,278м/с. Вопрос 13 Ускорение
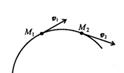
Скорость точки при перемещении из точки М1 в точку М2 меняется по величине и направлению. Среднее значение ускорения за этот промежуток времени
Обычно для удобства рассматривают две взаимно перпендикулярные составляющие ускорения: нормальное и касательное. Нормальное ускорение ап характеризует изменение скорости по направлению и определяется как
где г — радиус кривизны траектории в данный момент времени.
Нормальное ускорение всегда направлено перпендикулярно скорости к центру дуги. Касательное ускорение at характеризует изменение скорости по величине и всегда направлено по касательной к траектории; при ускорении его направление совпадает с направлением скорости, а при замедлении оно направлено противоположно направлению вектора скорости. Формула для определения касательного ускорения имеет вид:
Вопрос 14 Виды движения точки Равномерное движение. Э то движение с постоянной скоростью: v — const.
Уравнение (закон) движения точки при равномерном движении - уравнение прямой:
, где So — путь, пройденный до начала отсчета.
Равнопеременное движение. Э то движение с постоянным касательным ускорением: at = const.
Значение скорости при равнопеременном движении
Закон равнопеременного движения в общем виде, представляющий уравнение параболы:
So — путь, пройденный до начала отсчета; at — постоянное касательное ускорение. Вопрос 15 Вопрос 16 Принцип кинетостатики (принцип Даламбера) Принцип кинетостатики используют для упрощения решения задач динамики. Реально силы инерции приложены к телам, связанным с разгоняющимся телом (к связям). Даламбер предложил условно прикладывать силу инерции к активно разгоняющемуся телу. Тогда система сил, приложенных к материальной точке, становится уравновешенной, и можно при решении задач динамики использовать уравнения статики.
Материальная точка под действием активных сил, реакций связей и условно приложенной силы инерции находится в равновесии:
Вопрос 17 Трение скольжения. Причина — механическое зацепление выступов. Сила сопротивления движению при скольжении называется силой трения скольжения
1. Сила трения скольжения прямо пропорциональна силе нормального давления: F тр = Ff = fR, где R — сила нормального давления, направлена перпендикулярно опорной поверхности; f — коэффициент трения скольжения. Сила трения всегда направлена в сторону, обратную направлению движения. 2. Сила трения меняется от нуля до некоторого максимального значения, называемого силой трения покоя (статическое трение): 0 < Ff ≤ Ffo, Ff 0 — статическая сила трения (сила трения покоя). Трение качения Сопротивление при качении связано с взаимной деформацией грунта и колеса и значительно меньше трения скольжения. Обычно считают грунт мягче колеса, тогда в основном деформируется грунт, и в каждый момент колесо должно перекатываться через выступ грунта. Вопрос 18 Работа силы тяжести Работа силы тяжести зависит только от изменения высоты и равна произведению модуля силы тяжести на вертикальное перемещение точки:
Вопрос 19
Для характеристики работоспособности и быстроты совершения работы введено понятие мощности.
Средняя мощность при поступательном движении равна произведению модуля силы на среднюю скорость перемещения и на косинус угла между направлениями силы и скорости.
Мощность при вращении
Учитывая, что получим где ωcp — средняя угловая скорость.
Мощность силы при вращении равна произведению вращающего момента на среднюю угловую скорость.
Вопрос 20 Вопрос 21 Вопрос 22 Вопрос 23 Вопрос 24 Классификация передач Механическими передачами называют механизмы, передающие энергию от двигателя к рабочим органам машины с преобразованием скоростей, сил или моментов, а иногда и характера движения. Классификация механических передач: · по принципу передачи движения: передачи трением (фрикционная и ременная) и передачи зацеплением (зубчатые, червячные, цепные, передачи винт-гайка); внутри каждой группы существуют передачи непосредственным контактом и передачи гибкой связью; · по взаимному расположению валов: передачи с параллельными валами (цилиндрические), передачи с пересекающимися осями валов (конические), передачи со скрещивающими валами (червячные, цилиндрические с винтовым зубом, гипоидные); · по характеру передаточного числа: с постоянным передаточным числом и с бесступенчатым изменением передаточного числа (вариаторы). Основные причины применения передач в машинах: · требуемые скорости рабочих органов машины часто не совпадают со скоростями стандартных двигателей; · скорости рабочего органа машины часто необходимо регулировать (изменять) в процессе работы; · большинство рабочих органов машин должны работать при малых скоростях и обеспечивать большие вращающие моменты, а высокооборотные двигатели экономичнее; · двигатели изготовляют для равномерного вращательного движения, а в машинах иногда требуется прерывистое поступательное движение с изменяющимися скоростями. Вопрос 25 Вопрос 26 Вопрос 27
Ременная передача — фрикционная передача (нагрузка передается силами трения) с помощью гибкой связи (упругого ремня). Ременная передача применяется для соединения валов, расположенных на значительном расстоянии друг от друга. Классификация ременных передач В зависимости от формы поперечного сечения ремня передачи делятся на: плоскоременные, клиноременные, поликлиновые и с круглым ремнем. По расположению валов в пространстве различают: • передачи с параллельными валами: открытые, перекрестные; • передачи со скрещивающимися валами — полуперекрестные; • передачи с пересекающимися осями валов — угловые. Достоинства ременных передач: • ременная передача смягчает толчки и удары — может демпфировать колебания; • ременная передача может служить предохранительным звеном при перегрузках; • ременная передача может использоваться для бесступенчатой регулировки скорости (см. рис. 2.3, д); • возможность передачи движения на значительные расстояния (до 15 м и более). Недостатки ременных передач: • большие габаритные размеры; • невозможно обеспечить постоянство передаточного отношения; • долговечность ремня недостаточна; • значительные нагрузки на опоры, особенно у плоскоременных передач. Вопрос 28 Вопрос 29 Валы и оси
Оси, поддерживая расположенные на них детали, вращающего момента не передают. Оси бывают вращающимися и неподвижными. Исходя из расчета на прочность и для удобства установки деталей валы выполняют ступенчатыми. Переходные участки вала выполняют цилиндрическими или коническими с галтелями разной формы и фасками. Валы и вращающиеся оси при работе испытывают циклически изменяющиеся напряжения и чаще всего выходят из строя в результате усталостных разрушений. Основными расчетными нагрузками являются крутящий момент (для валов) и изгибающий момент. Основными критериями работоспособности являются прочность и жесткость. Вопрос 30 Редукторы Редукторы — это механизмы, служащие для понижения угловых скоростей и увеличения вращающих моментов и выполненные в виде отдельных агрегатов. Передача размещается в отдельном жестком корпусе, не проницаемом для масла и пыли. Редукторы обеспечивают постоянное передаточное число. Передаточные числа стандартных редукторов от 1 до 400, большие передаточные числа применяют редко. При малых передаточных числах применяют одноступенчатые редукторы с передаточными числами до 10, чаще — до 6,37. Основное распространение получили двухступенчатые редукторы с передаточными числами 15...30. При больших передаточных числах применяют трехступенчатые редукторы; в последнее время они вытесняются более компактными планетарными. Чаще применяют цилиндрические зубчатые редукторы.
Для обозначения типов использованных зубчатых передач применяют прописные буквы: Ц — цилиндрические; К — конические; КЦ — коническо – цилиндрические; Ч — червячные; ЧЦ — червячно-цилиндрические и т. д. На рисунке изображен одноступенчатый цилиндрический редуктор. Такие редукторы выпускают с прямозубыми, косозубыми и шевронными колесами. Широкие редукторы обозначаются буквой Ш, узкие — У, соосные — С. Для улучшения условий работы тихоходной ступени используют редукторы с раздвоенной быстроходной ступенью, редукторы с раздвоенной ступенью обозначаются буквой Ш. Большие передаточные отношения, плавность, бесшумность и возможность самоторможения обеспечивают червячные редукторы. Червячные редукторы выпускают с цилиндрическими, глобоидными и спироидными червяками. Высокое передаточное отношение при низком уровне шума имеют двухступенчатые червячные и червячно-цилиндрические редукторы. Основные недостатки червячных редукторов — низкий КПД и малый ресурс работы. Вопрос 1 Аксиомы статики
Третья аксиома. Не нарушая механического состояния тела, можно добавить или убрать уравновешенную систему сил (принцип отбрасывания системы сил, эквивалентной нулю)
Вместо параллелограмма можно построить треугольник сил: силы вычерчивают одну за другой в любом порядке; равнодействующая двух сил соединяет начало первой силы с концом второй.
Силы действующие и противодействующие всегда приложены к разным телам, поэтому они не уравновешиваются. Силы, с которыми два тела действуют друг на друга, всегда равны по модулю и направлены вдоль одной прямой в разные стороны. Вопрос 2 Связи и реакции связей. Определение направления реакций связей Законы и теоремы статики справедливы для свободного твердого тела. Все тела делятся на свободные и связанные. Свободные тела — тела, перемещение которых не ограничено. Связанные тела — тела, перемещение которых ограничено другими телами. Тела, ограничивающие перемещение других тел, называют связями. Силы, действующие от связей и препятствующие перемещению, называют реакциями связей.
Все связи можно разделить на несколько типов. Связь — гладкая опора (без трения). Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре.
Жесткий стержень. На схемах стержни изображают толстой сплошной линией. Стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня..
Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки). Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т. к. не допускается только перемещение поперек опорной поверхности.
Защемление или «заделка». Любые перемещения точки крепления невозможны. Под действием внешних сил в опоре возникают реактивная сила и реактивный момент МR, препятствующий повороту Реактивную силу принято представлять в виде двух составляющих вдоль осей координат R = Rx + Ry Вопрос 3
|
||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 265; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.60 (0.013 с.) |

 Первая аксиома. Под действием уравновешенной системы сил абсолютно твердое тело или материальная точка находятся в равновесии или движутся равномерно и прямолинейно (закон инерции).
Первая аксиома. Под действием уравновешенной системы сил абсолютно твердое тело или материальная точка находятся в равновесии или движутся равномерно и прямолинейно (закон инерции). Вторая аксиома. Две силы, равные по модулю и направленные по одной прямой в разные стороны, уравновешиваются.
Вторая аксиома. Две силы, равные по модулю и направленные по одной прямой в разные стороны, уравновешиваются. Четвертая аксиома (правило параллелограмма сил). Равнодействующая двух сил, приложенных в одной точке, приложена в той же точке и является диагональю параллелограмма, построенного на этих силах как на сторонах.
Четвертая аксиома (правило параллелограмма сил). Равнодействующая двух сил, приложенных в одной точке, приложена в той же точке и является диагональю параллелограмма, построенного на этих силах как на сторонах. Пятая аксиома. При взаимодействии тел всякому действию соответствует равное и противоположно направленное противодействие.
Пятая аксиома. При взаимодействии тел всякому действию соответствует равное и противоположно направленное противодействие. Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей).
Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей). 
 Гибкая связь (нить, веревка, трос, цепь). Груз подвешен на двух нитях Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута.
Гибкая связь (нить, веревка, трос, цепь). Груз подвешен на двух нитях Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута. Шарнирная опора
Шарнирная опора Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.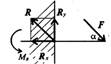 Неподвижный шарнир. Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Её принято изображать ввиде двух составляющих: горизонтальной и вертикальной (Rx, Ry).
Неподвижный шарнир. Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Её принято изображать ввиде двух составляющих: горизонтальной и вертикальной (Rx, Ry).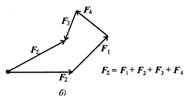 Определение равнодействующей системы сил геометрическим способом. Силовой многоугольник
Определение равнодействующей системы сил геометрическим способом. Силовой многоугольник Используя свойства векторной суммы сил, можно получить равнодействующую любой сходящейся системы сил, складывая последовательно силы, входящие в систему. Образуется многоугольник сил. Вектор равнодействующей силы соединит начало первого вектора с концом последнего.
Используя свойства векторной суммы сил, можно получить равнодействующую любой сходящейся системы сил, складывая последовательно силы, входящие в систему. Образуется многоугольник сил. Вектор равнодействующей силы соединит начало первого вектора с концом последнего.

 Скорость
Скорость


 Векторная величина, характеризующая быстроту изменения скорости по величине и направлению, называется ускорением точки.
Векторная величина, характеризующая быстроту изменения скорости по величине и направлению, называется ускорением точки.
 При рассмотрении бесконечно малого промежутка времени среднее ускорение превратится в ускорение в данный момент:
При рассмотрении бесконечно малого промежутка времени среднее ускорение превратится в ускорение в данный момент:

 Значение полного ускорения определяется как а t = d V / dt = v 1 = S ’’ .
Значение полного ускорения определяется как а t = d V / dt = v 1 = S ’’ .

 При криволинейном равномерном движении
При криволинейном равномерном движении
 Полное ускорение равно нормальному ускорению: а = ап.
Полное ускорение равно нормальному ускорению: а = ап.
 Полное ускорение равно касательному ускорению.
Полное ускорение равно касательному ускорению.


 где v 0 — начальная скорость движения;
где v 0 — начальная скорость движения; Принцип Даламбера:
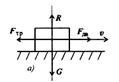
Принцип Даламбера: Рассмотрим движение платформы по шероховатой поверхности с ускорением.
Рассмотрим движение платформы по шероховатой поверхности с ускорением. Активные силы: движущая сила, сила трения, сила тяжести. Реакция в опоре R. Прикладываем силу инерции в обратную от ускорения сторону. По принципу Даламбера, система сил, действующих на платформу, становится уравновешенной, и можно составить уравнения равновесия. Наносим систему координат и составляем уравнения проекций сил.
Активные силы: движущая сила, сила трения, сила тяжести. Реакция в опоре R. Прикладываем силу инерции в обратную от ускорения сторону. По принципу Даламбера, система сил, действующих на платформу, становится уравновешенной, и можно составить уравнения равновесия. Наносим систему координат и составляем уравнения проекций сил.
 Законы трения скольжения:
Законы трения скольжения:
 где Δh — изменение высоты. При опускании работа положительна, при подъеме отрицательна.
где Δh — изменение высоты. При опускании работа положительна, при подъеме отрицательна.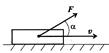 Мощность
Мощность Мощность — работа, выполненная в единицу времени:
Мощность — работа, выполненная в единицу времени: Единицы измерения мощности: ватты, киловатты,
Единицы измерения мощности: ватты, киловатты,
 Мощность при поступательном движении
Мощность при поступательном движении Учитывая, что S/t = vcp, получим где F — модуль силы, действующей на тело; vср — средняя скорость движения тела.
Учитывая, что S/t = vcp, получим где F — модуль силы, действующей на тело; vср — средняя скорость движения тела. Тело движется по дуге радиуса r из точки М1 в точку M2
Тело движется по дуге радиуса r из точки М1 в точку M2 Работа силы:
Работа силы: 
 где Мвр — вращающий момент.
где Мвр — вращающий момент.

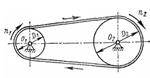 Общие сведения о ременных передачах
Общие сведения о ременных передачах Валы предназначены для передачи вращающего момента и поддержания расположенных на них деталей.
Валы предназначены для передачи вращающего момента и поддержания расположенных на них деталей. Тип редуктора определяют по виду зубчатых передач и порядку их размещения в направлении от двигателя, по числу ступеней и расположению геометрических осей тихоходных валов в пространстве.
Тип редуктора определяют по виду зубчатых передач и порядку их размещения в направлении от двигателя, по числу ступеней и расположению геометрических осей тихоходных валов в пространстве.


