Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Динамические характеристики ИД с якорным управлениемСодержание книги
Поиск на нашем сайте Динамические процессы двигателя описываются уравнениями (5.40). Переходим к операторной форме записи и находим передаточную функцию ИД по управлению (при этом принимаем М с = 0)
где Всегда Т м > 4 Т я, тогда корни знаменателя (5.45) действительные, и передаточную функцию можно приближенно представить в виде
Для ИД обычных конструкций Тм = (0,05–0,15) с. Почти всегда Т м >> Т я, то есть инерционностью электромагнитных процессов можно пренебречь, и передаточная функция ИД рассматривается в виде
Если в качестве выходной величины ИД принять не частоту вращения, а угол поворота вала φ, то получим передаточную функцию
Способ полюсного управления Полюсное управление (управление по цепи возбуждения) возможно для ИД с обмоткой независимого возбуждения (рис. 5.20 а). Для ограничения тока якоря I Я в цепь якоря подается пониженное значение напряжения U Я = const. Получим выражение для статических характеристик ИД. Магнитный поток Ф пропорционален напряжению управления U y, поэтому запишем: Ф = kU y = k α U yн. (5.49) Связь между w и М уже установлена в (5.41). Для случая полюсного управления надо заменить U у на U я и подставить Ф из (5.49). Получаем:
Частота вращения идеального холостого хода при a = 1, М = 0
Номинальный пусковой момент при a = 1, w = 0 J
Вновь вводим относительные единицы ν и m. Из (5.13) получаем
Уравнение (5.16) определяет семейство механических и регулировочных характеристик ИД с полюсным управлением (рис. 5.25). Вспомним: механические характеристики – это зависимости ν(m) при фиксированных значениях a = const. Регулировочные характеристики – это зависимости ν(a) при фиксированных
значениях момента m = m c = const. Из рис. 5.25 и выражения (5.53) вытекают следующие особенности механических характеристик: – механические характеристики устойчивы и линейны, но их жесткость (наклон) зависит от коэффициента сигнала, при снижении коэффициента сигнала характеристики становятся более мягкими; – частота вращения холостого хода обратно пропорциональна коэффициенту сигнала и при малых его значениях резко возрастает, т.е. существует опасность разноса; – пусковой момент в относительных единицах равен коэффициенту сигнала. Особенности регулировочных характеристик (см. рис. 5.25, б) заключаются в следующем: – регулировочные характеристики нелинейны и при m < 0,5 неоднозначны, т.е. имеют экстремум и участки положительной и отрицательной крутизны, поэтому полюсное управление применяется при работе ИД под нагрузкой при m > 0,5; – в режиме холостого хода (m = 0) регулировочная характеристика представляет собой гиперболу, т.е. существует опасность разноса ИД при малых значениях коэффициента сигнала; – порог трогания ИД под нагрузкой равен относительному значению момента сопротивления на валу. Обычно в чистом виде полюсное управление ИД не используется, а в сочетании с якорным управлением обеспечивает расширение диапазона регулирования частоты вращения wmax/wmin с 7–10 до 20–50. Пример схемы комбинированного управления ИД приведен на рис. 5.26
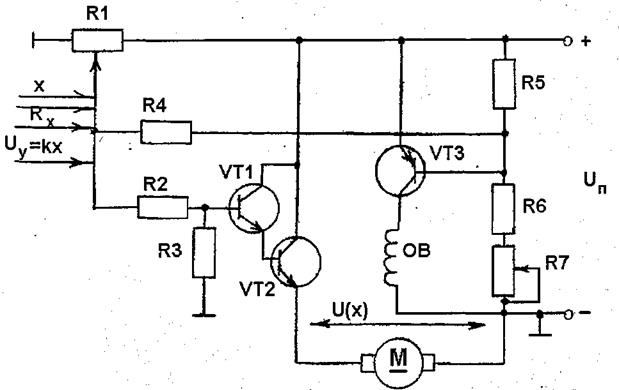
Рис. 5.26. Схема комбинированного управления исполнительным двигателем
Схема нереверсивна и работает следующим образом. Перемещение х по схеме влево движка потенциометрического задатчика R1 приводит к увеличению напряжения якоря U (x), которое передается на якорь эмиттерным повторителем на спаренных транзисторах VT1, VT2, т.е. реализуется якорное управление. Одновременно изменяется напряжение на базе транзистора VT3, в результате чего уменьшается ток возбуждения ИД (полюсное управление). В результате быстро нарастает частота вращения. Ток возбуждения никогда не снижается до нуля, т.е. транзистор VT3 полностью не закрывается. Минимальный ток возбуждения устанавливается подстроечным резистором R7.
|
|||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 183; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.103 (0.006 с.) |

 (5.45)
(5.45) – коэффициент передачи ИД;
– коэффициент передачи ИД; – электромеханическая постоянная времени;
– электромеханическая постоянная времени; – постоянная времени цепи якоря (электромагнитная постоянная времени).
– постоянная времени цепи якоря (электромагнитная постоянная времени). (5.46)
(5.46) (5.47)
(5.47) (5.48)
(5.48) (5.50)
(5.50) (5.51)
(5.51) (5.52)
(5.52) (5.53)
(5.53)