Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматизированные системы контроля и управленияСодержание книги Поиск на нашем сайте Автоматизированные системы контроля и управления Методические указания к лабораторным работам Чебоксары 2010 УДК 681.51(075.8) Составители: И.Н. Мальцев, ББК З965я73 В.Г. Медведев
Автоматизированные системы контроля и управления: метод. указания к лабораторным работам / сост. В.Г. Медведев, И.Н. Мальцев; Чуваш. ун-т. – Чебоксары, 2010. – 52 с.
Содержат описание и методику проведения лабораторных работ по курсу «Автоматизированные системы контроля и управления».
Для студентов V курса, обучающихся по направлению 210300 «Радиотехника».
Утверждено Методическим советом университета Отв. редактор канд. техн. наук, доцент В.Г. Медведев Общие указания
Студенты, изучающие дисциплину «Автоматизированные системы контроля и управления», согласно учебному плану должны выполнить лабораторные и практические работы. До начала лабораторных занятий студенты получают допуск к работе у преподавателя. Для этого необходимо подготовить в соответствии с индивидуальным заданием план работы, т.е. изучить теоретическую часть, разработать алгоритм выполнения и составить заготовку. Содержание отчета: 1. Титульный лист. 2. Цель работы. 3. Постановка задачи (индивидуальное задание). 4. Описание выполнения лабораторной работы. 5. Алгоритм в виде ГСА. 6. Текст программы на одном из языков программирования (по указанию преподавателя). 7. Диалог на ЭВМ (исходные данные для программы, результат и графики расчетов). 8. Список рекомендуемой литературы. 9. Содержание. Защита работы проводится студентом по правильно оформленному отчету. Студент, выполнивший полный объем работ согласно учебному плана, допускается к экзамену.
ЛАБОРАТОРНАЯ РАБОТА 1 Исследование макета «Эмулятор светофора» на основе промышленного контроллера КРОСС Цель работы: изучение способов программирования лабораторного макета «Эмулятор светофора» в среде ISAGraf и управление промышленным контроллером КРОСС.
Задания к лабораторной работе 1. Изучить структурную, функциональную схему лабораторного макета. 2. Ознакомиться со структурной схемой и принципом действия хостконтроллера, модуля УСО DO1-16, блоками питания КР-DC24V1, DRA60-24 и БПН-24, терминального блока T1-D, эмулятор светофора. 3. Используя программы «конфигуратор КРОСС» и «эмулятор пулта настойки (ЭПН)» изучить способы ручного управления контроллером и выходами модуля DO1-16. 4. Изучить алгоритм программирования модуля УСО DO1-16 в среде ISaGRAF. 5. Получить индивидуальное задание у преподавателя и разработать программу управления эмулятором светофора. 6. Подготовить отчет и защитить.
Список рекомендуемой литературы 1. Руководство по эксплуатации контроллеров КРОСС CD диск с руководством пользователя). 2. ISaGRAF версия 3.51. Руководство пользователя(CD диск с руководством пользователя). 3. http://www.zeim.ru/production/DOcs/controllers/rp-1.pdf. – описание SCADA системы ISaGRAF ч. 1. 4. http://www.zeim.ru/production/DOcs/controllers/rp-2.pdf. – описание SCADA системы ISaGRAF ч. 2. 5. http://www.zeim.ru/production/DOcs/controllers/rp-3.pdf. – описание SCADA системы ISaGRAF ч. 3. 6. http://www.zeim.ru/production/DOcs/controllers/rp-4.pdf. – Описание SCADA системы ISaGRAF ч. 4. 7. Руководство по эксплуатации контроллеров КРОСС 500 (CD диск с руководством пользователя). ЛАБОРАТОРНАЯ РАБОТА 2 Исследование автоматизированного измерения сигналов С использованием платы ЛА-н10М6PCI
Цель работы изучение способов измерения сигналов на основе платы ЛА-н10М6PCI с применением утилиты ADCLab ЗАО «Руднев – Шиляев».
Описание платы ЛА-н10М6 PCI Плата ЛА-н10М6PCI содержит следующие функциональные узлы: аналого-цифровой канал (АЦК); контроллер АЦП; схема синхронизации; внутреннее оперативное запоминающее устройство (ОЗУ) и интерфейс ввода/вывода PCI (рис. 2.1). Основное назначение АЦК – преобразование исследуемого аналогового сигнала в цифровую форму, для его дальнейшей обработки на ПЭВМ. Аналоговый сигнал подается на входы каналов 0 и/или 1 (разъемы ХР4 и ХР3). Далее сигнал поступает на двухкаскадный программируемый аттенюатор. Программируемый аттенюатор состоит из схем деления, усиления и аппаратного смещения входного сигнала для обоих Аналоговые входы платы с защитой от перегрузок по напряжению ±15 В и отключаемый режим дифференцирования входного сигнала. При отключенном дифференцировании пропускаются переменная и постоянная составляющие входного сигнала. Основное назначение многофункционального контроллера АЦП – согласование работы АЦП с внутренним ОЗУ. Контроллер АЦП позволяет задать объем предыстории ОЗУ и общий объем используемой памяти ОЗУ, а также выбрать частоту дискретизации АЦП. Источник тактовой частоты АЦП может быть внешний или внутренний. Внешним источником тактовой частоты АЦП является ТТЛ-совместимый сигнал, подаваемый на разъем ХР2, внутренним источником служит кварцевый генератор или синтезатор частоты (опция). При работе с кварцевым генератором тактовый сигнал поступает на схему задания частоты дискретизации, которая позволяет программно выбрать частоту дискретизации АЦП из набора сетки частот от 3,052 кГц до 50 МГц с коэффициентом деления кратным 2. Кроме того, предусмотрена возможность работы платы ЛА-н10М6PCI в одноканальном режиме (канал 0) с удвоенной частотой дискретизации. Для этого предназначена схема выбора режима «50 МГц» или «100 МГц» на входе АЦП. Если выбран режим «100 МГц», то оба канала АЦП работают попеременно, с частотой по 50 МГц каждый. В итоге суммарная частота дискретизации удваивается до 100 МГц. При работе с внутренним кварцевым генератором достигаются наилучшие динамические характеристики, что особенно необходимо при использовании платы в качестве спектроанализатора. При работе со встроенным синтезатором частоты (опция) частота дискретизации плавно изменяется, и это свойство синтезатора частоты может использоваться для работы платы в режиме стробоскопа или решения каких-либо других задач, где требуется плавное изменение частоты дискретизации. Внешняя тактовая частота может использоваться для согласования момента запуска АЦП с какими-либо внешними устройствами, для обеспечения синхронной работы нескольких плат АЦП или для других целей. Аналоговый компаратор позволяет запустить сбор данных по достижению заранее заданного уровня синхронизации на одном из входных каналов или на входе внешней синхронизации. Выбор источника синхронизации, а также уровень синхронизации и полярность срабатывания (по фронту или по спаду) осуществляется программно. Максимальный объем оперативно запоминающего устройства (ОЗУ) расположенного на плате – 256 кСлов. ОЗУ состоит из двух частей – циклического буфера «предыстории» и буфера «истории». Общий объем ОЗУ и объем буфера «предыстории» задается пользователем. Схема работы ОЗУ следующая. После прихода команды запуска АЦП данные АЦП циклически (непрерывно) записываются в буфер предыстории и, если синхронизация включена, далее сразу продолжается запись данных в буфер истории. После заполнения буфера истории данные могут быть считаны в компьютер. При включенной синхронизации, пока выбранный объем предыстории не заполнен, синхроимпульсы блокируются и не обрабатываются контроллером АЦП. После заполнения объема предыстории до прихода первого синхроимпульса данные АЦП продолжают циклически (непрерывно) записываться в буфер предыстории. После прихода синхроимпульса записывается оставшаяся часть ОЗУ. Теперь данные могут быть считаны в компьютер. Независимо от условий синхронизации после заполнения буфера предыстории может задаваться переключение частоты дискретизации АЦП с текущей частоты на частоту 6,25 МГц или 50 МГц. Таким образом, в обеих частях памяти могут содержаться данные, записанные с разной частотой дискретизации. Компьютер считывает данные ОЗУ, используя регистр данных АЦП. Информацию о готовности данных по окончании цикла записи ОЗУ компьютер может получить, опрашивая статусный регистр или по запросу прерывания IRQ. Интерфейс ввода/вывода PCI предназначен для организации обмена данными между компьютером и платой ЛА-н10М6PCI. Контроллером шины PCI автоматически выбирается базовый адрес ЛА-н10М6PCI в адресном пространстве компьютера, а также линия прерывания IRQ.
Схема ввода/вывода данных в компьютер полностью совместима с протоколом шины PCI 2.1 и содержит необходимые внутренние регистры для программного управления. Плата ЛА-н10М6PCI для управления основными режимами имеет СБИС с программно загружаемой конфигурацией. Имеется два загрузочных программных модуля – для работы со встроенным кварцевым генератором или встроенным синтезатором частоты (опция).
Основные сведения утилиты ADCLab Программа ADCLab предназначена для использования вместе с платами АЦП в качестве осциллографа со спектроанализатором. Эта программа позволяет увидеть сигнал, измеряемый с помощью устройства АЦП, в реальном времени, а также его спектр.
Основные характеристики программы: 1. Выбор произвольной частоты дискретизации.* 2. Выбор довольно произвольного размера блока.** 3. Выбор произвольного количества каналов.* 4. Программная синхронизация для устройств без аппаратной синхронизации. 5. Поддержка режима аппаратной синхронизации. 6. Поддержка некоторых специфических функций устройств (кадровый сбор, включение внешней частоты дискретизации и т.п.). 7. Сохранение данных в файл «как есть» и форматах ASCII и WAV. 8. Воспроизведение сохранённых данных из файлов с данными «как есть» и в формате WAV. * – ограничивается только возможностями устройств. ** – ограничивается только возможностями устройств, исключая плату ЛАБП, размер максимального объёма отображаемых данных составляет 512 кСлов. Программа-осциллограф ADCLab может работать с любыми АЦП устройствами, поддерживающими блочный сбор данных, если существует соответствующий драйвер, а именно (на момент написания этого документа): ЛА-н10М6. Для запуска программы и получения с её помощью каких-либо результатов надо предпринять следующие шаги: 1. Выключите питание компьютера. 2. Дотроньтесь до заземлённого проводника (например, до зачищенной шкуркой поверхности радиатора центрального отопления), чтобы снять статический заряд с Вашей кожи. 3. Достаньте из коробочки плату АЦП и установите её в свободный ISA слот, предварительно проверив корректность номеров прерывания и канала ПДП. 4. Включите питание компьютера. 5. Установите прилагаемое к плате программное обеспечение для Windows. 6. Запустите программу ADCLab. 7. В окне настроек выберите устройство и установите его параметры (номера прерывания и канала ПДП). 8. Установите при помощи ручек частоту дискретизации и размер блока. 9. Нажмите кнопу Run (Пуск). 10. Анализируйте сигнал. 11. Если ничего не происходит, то см. параграф «Решение проблем». 12. Возможно прямо «на ходу» менять частоту дискретизации, количество измерений, включать и отключать синхронизацию и т.д. и т.п. Как использовать ADCLab В верхней части окна программы сосредоточены основные элементы
управления работой программы, отображения данных и т.д. Их условно можно разделить на следующие группы (на рисунке следуют слева на право и сверху вниз): 1. Кнопки управления окнами. 2. Оперативная регулировка параметров измерения. 3. Сохранение «картинки». 4. Действия над каналами. 5. Управление синхронизацией. 6. Возможности отображения данных. Большинство из этих элементов управления снабжены всплывающими подсказками.
Кнопки управления окнами
Оперативная регулировка параметров измерения Элементы управления оперативной настройкой параметров измерения предназначены и, что более удивительно, быстро устанавливать необходимые для проведения измерений параметры.
Это список коэффициентов усиления, поддерживаемых конкретной платой.
Данная кнопка запускает осциллограф.
Нажатие на эту кнопку приводит к появлению всплывающего ползунка, с помощью которого можно настроить «чувствительность» программной синхронизации.
вания» каналов. Их назначение слева направо. Первая и самая крупная включает режим перетаскивания изображаемых графиков. Графики перемещаются мышью при нажатой левой кнопке. На самом деле Вы перемещаете физический «ноль» графика. В сдвинутом состоянии «нуль» графика помечается штрихпунктирной линией.
Окно настроек предназначено для настройки работы программы, а также для использования дополнительных функций, реализованных в программе. Его пункты имеют следующее значение: 1. «Поверх всех окон» – окно не будет перекрываться никаким другим окном того же приложения, кроме окон с таким же установленным атрибутом. 2. «Скрыть» – закрывает окно, имеет тот же эффект, что и крест в правом верхнем углу. 3. «Расставить» – все видимые окна располагаются таким образом, чтобы закрыть всю видимую область монитора и не перекрывать друг друга при этом. С помощью этой закладки можно настроить необходимые для работы программы параметры используемых устройств.
Следующим пунктом идёт аббревиатура «ПЧД». Она означает Переключение Частоты дискретизации по окончании сбора предыстории. Закладка «Сетка» позволяет настроить свойства графической области осциллографа.
Закладка «Оси» предназначена для выбора масштабов шкал и формы представления данных.
В закладке «БПФ» можно произвести некоторые настройки для режима анализа спектра сигнала.
Нажатие на кнопку приводит к появлению окна, в котором отображаются параметры сигнала. В ниспадающем списке слева от надписи «Колонки» задаётся количество колонок, в которые будут сгруппированы параметры во время вывода. Для того чтобы они вычислялись надо поставить галочку в квадратик слева от надписи «Вычислять».
В закладке «Язык» Вы можете выбрать язык: английский, русский или немецкий (ожидается в следующих версиях).
Нажав на кнопку «Сохранить» в рамке с заголовком «Данные», можно сохранить только что собранные результаты измерений в разных форматах.Для открытия и просмотра ранее сохранённого файла на
В ниспадающем списке цветовых схем выберите схему, которую хотите изменить. В окне «Элемент» выбираете элемент изображения, цвет которого хочется поменять, затем нажимаете кнопку «Изменить» (текущим цветом этого элемента закрашен квадратик внутри рамки на этой кнопке) и подбираете подходящий цвет. Если пометить галочкой квадратик слева от надписи «Использовать», программа будет использовать для программирования таймеров плат настройки с этой странички.
Диапазон изменения задержек (делителей) от 1 до 65535. Для режима 0 минимальное значение 2, для режима 3 значение 3 недопустимо, а для режимов 1, 2, 4 и 5 минимальное значение 1. Закладка «синхронизация» предназначена для управления режимом аппаратной синхронизации.
В группе «Режим» содержатся две ячейки состояния. Первая, «Вкл.», включает режим аппаратной синхронизации. Её отмеченное состояние равносильно нажатию на одну из двух кнопок на главном окне, отвечающих за синхронизацию. Вторая, «М2», включает режим удвоения частоты. Его включение возможно на максимальной частоте дискретизации. При этом оба АЦП работают асинхронно с удвоенной частотой на один канал. Группа «Уровень» предназначена для выбора синхронизации либо по положительному перепаду – «Фронт», либо по отрицательному – «Срез». В окне «Источник» выбирается источник сигнала, по которому будет производится синхронизация. Это может быть либо один из аналоговых каналов: «Вход 0» или «Вход 1», либо вход для синхросигнала «Синхр.». В окне «Параметры» задаются параметры синхронизации. Уровень синхронизации задаётся в МЗРах, т.е. единицах АЦП, подробности см. в описание к плате. Размер предыстории задаётся в количестве блоков, каждый из которых имеет размер в 1/16 от общего измеренного блока данных. При включенной синхронизации все эти параметры визуализируются с помощью синхрокурсора в графической области осциллографа. Параметры «Смещ 0» и «Смещ 1» задают аппаратное смещение нуля соответственно для нулевого и первого каналов. Задаются в МЗР, подробности смотрите в описании к плате.
Графическая область – основная область осциллографа, где отображается практически в реальном времени график сигнала, подаваемого на вход(ы) платы.
Задания по лабораторной работе
1. Изучить структурную, функциональную схему платы ЛА-н10М6PCI. 2. Ознакомиться метрологическими параметрами платы ЛА-н10М6PCI. 3. Подключить генератор («ВЧ» или «НЧ») к плате к одному из каналов. 4. Запустить программу ADCLab и выполнить все процедуры согласно [1], меняя форму и параметры сигнала внешнего генератора. 5. Оформить отчет по работе и защитить его у преподавателя.
Список рекомендуемой литературы: 1. ЗАО «Руднев -Шиляев», «Руководство по эксплуатации платы ЛА-н10М6PCI». М., 2003 г. (CD-диск с руководством пользователя). 2. http://www.rudshel.ru/pdf/LA-n10M6PCI.rar. (описание измерительной платы ЛА-н10М6PCI). 3. http://www.rudshel.ru/show/?id=100 (описание утилиты ADCLab). ЛАБОРАТОРНАЯ РАБОТА 3 Задания к лабораторной работе
1. Изучить виды, назначение, основные параметры и характеристики шаговых двигателей. Изучить варианты управления различными шаговыми двигателями. Изучить варианты управления шаговыми двигателями. Изучить варианты схем питания шаговыми двигателями. 2. Изучить структурную и принципиальную схемы, конструкцию лабораторного макета. 3. Составить «заготовку» отчета и правильно ответив на 5 вопросов преподавателя получить допуск к выполнению работы. 4. Аккуратно подключить (в присутствии лаборанта или преподавателя) макет к компьютеру и включить питание. 5. По алгоритму работы макета выполнить пп. 6, 7. 6. Следуя указаниям лаборанта самостоятельно изучить работу макета в автономном режиме. Записать краткие выводы в отчет. 7. Следуя указаниям программы управления с ПЭВМ изучить работу макета в автоматизированном режиме управления. Записать краткие выводы в отчет. 8. Научиться сопоставлять структурную, принципиальную схемы и макет лабораторной работы. 9. Изучить программу управления ПЭВМ, с микроконтроллером в среде программирования PASCAL. 1) Запустить PASCAL. 2) Открыть управляющую программу (адрес программы уточнить у лаборанта). 3) Выполнить программу в пошаговом режиме. 4) Научиться устанавливать разные варианты управления двигателем. (Например, автоматическое (случайное или детерминированное изменение направления и скорости вращения двигателя)) Откомпилировать программу. Запустить на выполнение. Сравнить исполнение команд с пунктом 4.8. Записать измененный алгоритм и измененные фрагменты программ в отчет (только не списанные у соседа материалы!). 10. Составить отчет и защитить работу.
Список рекомендуемой литературы: 1. Джордейн Р. Справочник программиста персональных компьютеров. / – М.: Радио и связь, 1992.–280 с. 2. Кулешов С.В. Интерфейс PIC контроллера с компьютером. / Радио. – №7., 2003.– С.20-22. 3. Новоченко И.В. Интегральные схемы для бытовой радиоаппаратуры. / М.: Радио и связь, 1995.–324 с. 4. Перельман Б.Л.Транзисторы для аппаратуры широкого применения: Справочник./ М: Радио и связь, 1986.–567 с. 5. Яценков В.С. Микроконтроллеры Microchip. Практ. руководство. / М.: Горячая линия – Телеком, 2002.–296 с. 6. http://PIC16F84.narod.ru/index.htm – устройство управления на микроконтроллере PIC16F84. 7. http://www.kulakov.ru/ – разработка электронных устройств на PIC-контроллерах. 8. http://www.toehelp.ru/theory/electromach/contents.html – описание принципов работы шаговых двигателей. 9. http://www.maxim-ic.COM/quick_view2.cfm/qv_pk/179 – описание микросхемы MAX232. 10. http://www.microchip.ru/lit/pic/pic16x8x/PIC16F84. – описание PIC16F84. 11. Seiichi Inoue. PIC контроллер управляет электродвигателем / Радио. – №6., 2002.–с.4,5.
ЛАБОРАТОРНАЯ РАБОТА 4 Варианты сопряжения с ПК Наиболее распространенными интерфейсами ПК, которые можно использовать для подключения различных нестандартных устройств, таких как драйвер шагового двигателя, являются LPT, COM и USB порты. У каждого из них есть свои преимущества и недостатки. Ниже представлено краткое сравнение данных интерфейсов. Интерфейс LPT Является восьмиразрядным параллельным портом, обеспечивающим двунаправленный обмен данными между ПК и внешним устройством. В случае подключения драйвера шагового двигателя используются лишь информационные выводы и вывод GND. Основным достоинством данного интерфейса является то, что сигнал, снимаемый с информационных выводов, по стандарту TTL, имеет уровень логической единицы +5 В и уровень логического нуля +(0-0.3) В. Для предотвращения повреждения LPT порта случайными токами, предназначены резисторы сопротивлением 1 Ком. Вывод GND соединен напрямую с выводом 9 схемы управления шаговым двигателем, являющимся общим выводом для всех обмоток обоих двигателей. Достоинствами данного драйвера является возможность включения обмоток в произвольном порядке, что позволит обеспечить работу двигателя: - с попеременной коммутацией фаз; - с перекрытием фаз; - в полушаговом режиме. Таким образом, возможно программно обеспечить работу двигателя в тех режимах, которые не предусмотрены типовой схемой включения.
Пример исходного кода программы для работы с интерфейсом LPT на языке программирования Borland Delphi 7
Программа создана в визуальной среде программирования Borland Delphi 7. unit Unit1; interface
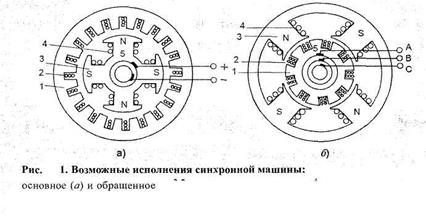
Рис. 4.4.Функциональная электрическая схема макета (а)
Рис. 4.4.Функциональная электрическая схема макета (б)
uses Windows, Messages, SysUtils, Classes, Graphics, Controls, Forms, Dialogs, LPTIO, ExtCtrls, StdCtrls; type TForm1 = class(TForm) Panel1: TPanel; ComboBox1: TComboBox; Label1: TLabel; procedure FormCreate(Sender: TObject); procedure FormDestroy(Sender: TObject); private { Private declarations } Lpt: TLptPortConnection; public { Public declarations } function GetCurrentPort: byte function GetCurrentRegister: byte; function Pin2: boolean; function Pin3: boolean; function Pin4: boolean; function Pin5: boolean; function Pin6: boolean; function Pin7: boolean; function Pin8: boolean; function Pin1: boolean; procedure ButtonPin2; procedure ButtonPin3; procedure ButtonPin4; procedure ButtonPin5; procedure ButtonPin6; procedure ButtonPin7; procedure ButtonPin8; procedure ButtonPin1; end; var Form1: TForm1; Ch: Boolean; I: integer; implementation {$R *.DFM} procedure TForm1.FormCreate(Sender: TObject); var msg: AnsiString; begin Lpt:= TLptPortConnection.Create; if not Lpt.Ready then begin Application.MessageBox(PChar(msg),'ERROR',MB_OK); Application.Terminate; end; ComboBox1.Items.Clear; ComboBox1.Text:= ''; if Lpt.IsPortPresent(LPT1) then ComboBox1.Items.Add('$3BC'); if Lpt.IsPortPresent(LPT2) then ComboBox1.Items.Add('$378'); //-ÂÍÈÌÀÍÈÅ: $378 çäåñü íàçâàí LPT2! if Lpt.IsPortPresent(LPT3) then ComboBox1.Items.Add('$278'); if 0<>ComboBox1.Items.Count then ComboBox1.ItemIndex:= 0; end; procedure TForm1.FormDestroy(Sender: TObject); begin Lpt.Destroy; end; function TForm1.GetCurrentPort: byte; begin if '$3BC' = ComboBox1.Text then GetCurrentPort:=LPT1 else if '$378' = ComboBox1.Text then GetCurrentPort:=LPT2 else GetCurrentPort:=LPT3; end; function TForm1.Pin2: boolean; Var d: boolean; begin d:= true; d:= d and (1 = (1 and Lpt.ReadPort((GetCurrentPort),0))); Pin2:= d; end; function TForm1.Pin3: boolean; Var d: boolean; begin d:= true; d:= d and (2 = (2 and Lpt.ReadPort(GetCurrentPort,0))); Pin3:= d; end;
function TForm1.Pin4: boolean; Var d: boolean; begin d:= true; d:= d and (4 = (4 and Lpt.ReadPort(GetCurrentPort,0))); Pin4:= d; end; function TForm1.Pin5: boolean; Var d: boolean; begin d:= true; d:= d and (8 = (8 and Lpt.ReadPort(GetCurrentPort,0))); Pin5:= d; end; function TForm1.Pin6: boolean; Var d: boolean; begin d:= true; d:= d and (16 = (16 and Lpt.ReadPort(GetCurrentPort,0))); Pin6:= d; end; function TForm1.Pin7: boolean; Var d: boolean; begin d:= true; d:= d and (32 = (32 and Lpt.ReadPort(GetCurrentPort,0))); Pin7:= d; end; function TForm1.Pin8: boolean; Var d: boolean; begin d:= true; d:= d and (64 = (64 and Lpt.ReadPort(GetCurrentPort,0))); Pin8:= d; end; function TForm1.Pin1: boolean; Var d: boolean; begin d:= true; d:= d xor (STROBE = (STROBE and Lpt.ReadPort(GetCurrentPort,2))); Pin1:= d; end; procedure TForm1.ButtonPin2; begin Lpt.WritePort (GetCurrentPort,0,(1 xor Lpt.ReadPort((GetCurrentPort),0))); end; procedure TForm1.ButtonPin3; begin Lpt.WritePort (GetCurrentPort,0,(2 xor Lpt.ReadPort((GetCurrentPort),0))); end; procedure TForm1.ButtonPin4; begin Lpt.WritePort (GetCurrentPort,0,(4 xor Lpt.ReadPort((GetCurrentPort),0))); end; procedure TForm1.ButtonPin5; begin Lpt.WritePort (GetCurrentPort,0,(8 xor Lpt.ReadPort((GetCurrentPort),0))); end; procedure TForm1.ButtonPin6; begin Lpt.WritePort (GetCurrentPort,0,(16 xor Lpt.ReadPort((GetCurrentPort),0))); end; procedure TForm1.ButtonPin7; begin<
|
||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 208; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.011 с.) |

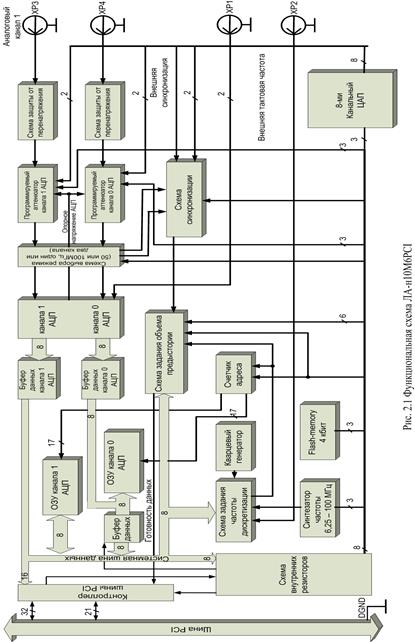 каналов 0 и 1, которые позволяют привести в соответствие входные диапазоны платы к рабочему диапазону АЦП. Напряжение смещения задается дискретно, имеет 256 уровней, что позволяет плавно изменять характеристику преобразования АЦП. После прохождения программируемого аттенюатора сигнал поступает на вход АЦП. АЦП преобразует аналоговый сигнал в цифровую форму (цифровые данные). Цифровые данные с выхода АЦП поступают в ОЗУ платы, откуда могут быть считаны в компьютер.
каналов 0 и 1, которые позволяют привести в соответствие входные диапазоны платы к рабочему диапазону АЦП. Напряжение смещения задается дискретно, имеет 256 уровней, что позволяет плавно изменять характеристику преобразования АЦП. После прохождения программируемого аттенюатора сигнал поступает на вход АЦП. АЦП преобразует аналоговый сигнал в цифровую форму (цифровые данные). Цифровые данные с выхода АЦП поступают в ОЗУ платы, откуда могут быть считаны в компьютер.
 Кнопка отображения окна настроек. Выводит на передний план окно, содержащее элементы, позволяющие изменить параметры программы.
Кнопка отображения окна настроек. Выводит на передний план окно, содержащее элементы, позволяющие изменить параметры программы. Кнопка расстановки всех окон. При нажатии этой кнопки три основных окна (главное, настроек и рассчитанных параметров сигналов) займут весь экран, не перекрываясь при этом.
Кнопка расстановки всех окон. При нажатии этой кнопки три основных окна (главное, настроек и рассчитанных параметров сигналов) займут весь экран, не перекрываясь при этом. Эта «ручка»” позволяет оперативно (т. е. прямо во время сбора данных) изменять объём собираемых для анализа данных. Он измеряется в словах на канал. Размер слова для конкретной платы смотрите в описании к ней, он может варьироваться в пределах от 8 (ЛА-н10) до 16 бит (ЛА-14). Максимальный размер блока ограничен 64 КСловами для плат без локальной памяти на все каналы (контроллер ПДП не позволяет за раз передавать более 64 К 16-битных слов), а для плат с памятью – размером установленной на ней памяти или 512 16-битных КСлов (что из двух окажется меньше).
Эта «ручка»” позволяет оперативно (т. е. прямо во время сбора данных) изменять объём собираемых для анализа данных. Он измеряется в словах на канал. Размер слова для конкретной платы смотрите в описании к ней, он может варьироваться в пределах от 8 (ЛА-н10) до 16 бит (ЛА-14). Максимальный размер блока ограничен 64 КСловами для плат без локальной памяти на все каналы (контроллер ПДП не позволяет за раз передавать более 64 К 16-битных слов), а для плат с памятью – размером установленной на ней памяти или 512 16-битных КСлов (что из двух окажется меньше). С помощью этого элемента управления можно оперативно менять частоту дискретизации сигнала.
С помощью этого элемента управления можно оперативно менять частоту дискретизации сигнала. Эти два комбинированных списка задают каналы, по которым надо произвести измерения.
Эти два комбинированных списка задают каналы, по которым надо произвести измерения. Данный комбинированный список позволяет просматривать каждый канал по отдельности.
Данный комбинированный список позволяет просматривать каждый канал по отдельности.

 Кнопка сохранения «картинки в файл». При нажатии на кнопку выводится стандартный диалог сохранения файла.
Кнопка сохранения «картинки в файл». При нажатии на кнопку выводится стандартный диалог сохранения файла. Эта кнопка позволяет выбрать канал, над которым Вы можете произвести одно из трёх действий: «засинхронизовать», «перетащить» или выбрать для просмотра данных в числовом виде в цифровой области окна осциллографа (см. ниже в разделе «Окно осциллографа»). Нажатие на часть кнопки со стрелочкой вниз приведёт к появлению красочного списка доступных каналов, а простой щелчок «мышкой» в другом месте на кнопке приведёт к выбору канала со следующим номером по кругу.
Эта кнопка позволяет выбрать канал, над которым Вы можете произвести одно из трёх действий: «засинхронизовать», «перетащить» или выбрать для просмотра данных в числовом виде в цифровой области окна осциллографа (см. ниже в разделе «Окно осциллографа»). Нажатие на часть кнопки со стрелочкой вниз приведёт к появлению красочного списка доступных каналов, а простой щелчок «мышкой» в другом месте на кнопке приведёт к выбору канала со следующим номером по кругу. С помощью этой кнопки выбираются уже указанные в предыдущем абзаце действия-манипуляции с сигналами выбранных кнопкой левее каналов.
С помощью этой кнопки выбираются уже указанные в предыдущем абзаце действия-манипуляции с сигналами выбранных кнопкой левее каналов. Эта группа кнопок позволяет управлять синхронизацией сигнала.
Эта группа кнопок позволяет управлять синхронизацией сигнала.
 Эта кнопка выбирает режим работы программной синхронизации.
Эта кнопка выбирает режим работы программной синхронизации. Эта кнопка имеет два состояния. В нажатом состоянии она включает режим анализа спектра сигнала. В этом режиме невозможно (в версии ADCLab на момент написания этого описания) изменение параметров синхронизации, положения графиков спектров сигналов и использование измерительных маркеров.
Эта кнопка имеет два состояния. В нажатом состоянии она включает режим анализа спектра сигнала. В этом режиме невозможно (в версии ADCLab на момент написания этого описания) изменение параметров синхронизации, положения графиков спектров сигналов и использование измерительных маркеров. При утопленной кнопке графики отображаются точками, при приподнятой – линиями. Если точек больше, чем ширина графической области, то графики будут отображаться линиями.
При утопленной кнопке графики отображаются точками, при приподнятой – линиями. Если точек больше, чем ширина графической области, то графики будут отображаться линиями. Эта группа кнопок управляет способами «перетаски-
Эта группа кнопок управляет способами «перетаски- Второй кнопкой Вы выбираете, тащить все графики разом (кнопка нажата) или только один. Следующая кнопка «разбрасывает» графики, т. е. расставляет их «нули» равномерно на равном расстоянии друг от друга. Последняя кнопка возвращает «нуль» одного или
Второй кнопкой Вы выбираете, тащить все графики разом (кнопка нажата) или только один. Следующая кнопка «разбрасывает» графики, т. е. расставляет их «нули» равномерно на равном расстоянии друг от друга. Последняя кнопка возвращает «нуль» одного или  всех графиков на место.
всех графиков на место. При утопленной кнопке включается режим высококачественного отображения графиков сигналов.
При утопленной кнопке включается режим высококачественного отображения графиков сигналов. Драйвер устройства, с которым Вы собираетесь работать, представляет собой библиотеку динамической компоновки (DLL).
Драйвер устройства, с которым Вы собираетесь работать, представляет собой библиотеку динамической компоновки (DLL). Базовый адрес ввода/вывода, номер линии запроса прерывания, номер канала прямого доступа к памяти (ПДП) соответственно.
Базовый адрес ввода/вывода, номер линии запроса прерывания, номер канала прямого доступа к памяти (ПДП) соответственно. Диапазон измеряемого входного напряжения.
Диапазон измеряемого входного напряжения. Эта закладка посвящается некоторым особенным возможностям плат как с памятью, так и работающих только посредством ПДП.
Эта закладка посвящается некоторым особенным возможностям плат как с памятью, так и работающих только посредством ПДП.
 Подобрать размер (кегль) шрифта, которым делаются подписи на шкалах, а также подписываются значения по вертикальной и горизонтальной осям. Может изменяться в пределах от 6 до 12.
Подобрать размер (кегль) шрифта, которым делаются подписи на шкалах, а также подписываются значения по вертикальной и горизонтальной осям. Может изменяться в пределах от 6 до 12. Нижнее значение вертикальной шкалы для графика спектра сигнала в децибелах. Может изменяться в диапазоне от 40 до 400 децибел на шкалу.
Нижнее значение вертикальной шкалы для графика спектра сигнала в децибелах. Может изменяться в диапазоне от 40 до 400 децибел на шкалу. Соотношение между размерами областей нормального вида и увеличенного вида (зума) в процентах. Увеличение этого соотношения приводит к увеличению области зума.
Соотношение между размерами областей нормального вида и увеличенного вида (зума) в процентах. Увеличение этого соотношения приводит к увеличению области зума. В этом окне выбирается масштаб горизонтальной оси.
В этом окне выбирается масштаб горизонтальной оси. В этом окне задаётся время на клетку в режиме «Сек/Дел». Его можно выбрать из выпадающего списка или при помощи кнопок под ним.
В этом окне задаётся время на клетку в режиме «Сек/Дел». Его можно выбрать из выпадающего списка или при помощи кнопок под ним. Здесь выбирается масштаб по вертикальной оси. Выбор первого пункта «МЗР» (Младший Значащий Разряд) установит значения вертикальной шкалы в соответствии с разрядностью кода, генерируемого АЦП платы.
Здесь выбирается масштаб по вертикальной оси. Выбор первого пункта «МЗР» (Младший Значащий Разряд) установит значения вертикальной шкалы в соответствии с разрядностью кода, генерируемого АЦП платы. В данном окне задаётся, сколько вольт придётся на одну клетку по вертикали в режиме «Вольт/Дел».
В данном окне задаётся, сколько вольт придётся на одну клетку по вертикали в режиме «Вольт/Дел». Маркеры привязываются к данным произвольного канала и позволяют произвести некоторые измерения в осциллографическом режиме. Каждый из двух маркеров имеет такой квадратик для управления. Нажатием на кнопку с изображением руки, держащей маркер, включается режим передвижения маркера. Маркеры никак не убираются с экрана. Привязать к какому-либо каналу можно двумя способами. Если выбран режим привязки «авто», то маркер будет сам «прилипать» к графику ближайшего к курсору канала. Если явно выбран номер канала, то маркер всегда будет привязан к нему.
Маркеры привязываются к данным произвольного канала и позволяют произвести некоторые измерения в осциллографическом режиме. Каждый из двух маркеров имеет такой квадратик для управления. Нажатием на кнопку с изображением руки, держащей маркер, включается режим передвижения маркера. Маркеры никак не убираются с экрана. Привязать к какому-либо каналу можно двумя способами. Если выбран режим привязки «авто», то маркер будет сам «прилипать» к графику ближайшего к курсору канала. Если явно выбран номер канала, то маркер всегда будет привязан к нему. При нажатии этой кнопки маркеры будут перемещаться вместе, т.е. будет сохраняться постоянным расстояние между ними по горизонтали.
При нажатии этой кнопки маркеры будут перемещаться вместе, т.е. будет сохраняться постоянным расстояние между ними по горизонтали. Нажатием этой кнопки с надписью «Инфо» выводится окно со всеми параметрами маркеров.
Нажатием этой кнопки с надписью «Инфо» выводится окно со всеми параметрами маркеров. В первом окошке можно выбрать оконную функцию, т.е. функцию, на которую помножается сигнал для устранения искажений при вычислении спектра, вызываемых тем, что данные собираются не непрерывно, а дискретными блоками.
В первом окошке можно выбрать оконную функцию, т.е. функцию, на которую помножается сигнал для устранения искажений при вычислении спектра, вызываемых тем, что данные собираются не непрерывно, а дискретными блоками. С помощью стрелочек в этом окне можно выбрать размер экспоненциального усреднения вычисленного спектра.
С помощью стрелочек в этом окне можно выбрать размер экспоненциального усреднения вычисленного спектра. В закладка «Параметры» Вы можете видеть общий вид окна настроек.
В закладка «Параметры» Вы можете видеть общий вид окна настроек.
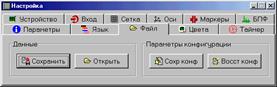 В закладке «Файл» предлагается несколько простейших действий, которые Вы можете совершить с собранными Вами результатами кспериментов и над самой программой.
В закладке «Файл» предлагается несколько простейших действий, которые Вы можете совершить с собранными Вами результатами кспериментов и над самой программой. жмите кнопку «Открыть». При этом можно выбрать файл в одном из вышеописанных форматов, кроме ASCII (ожидается поддержка в
жмите кнопку «Открыть». При этом можно выбрать файл в одном из вышеописанных форматов, кроме ASCII (ожидается поддержка в  последующих версиях). Форматы файлов различаются по расширениям, поэтому, если Вы использовали нестандартное расширение, то выберите «открыть любой файл», а программа спросит Вас при помощи специального диалогового окна какого же именно формата этот файл. Далее для правильного отображения данных, расчёта параметров и расчёта шкалы спектра сигнала надо указать некоторые дополнительные сведения о данных, содержащихся в файле в таком диалоговом окне. В другой рамочке с названием «Параметры конфигурации» нажатием на кнопку «Сохр. конф.» можно сохранить текущую конфигурацию программы (язык, настройки платы, параметры измерения, внешний вид) в файл, а нажатием на кнопку «Восст. конф.» – восстановить из файла сохранённую конфигурацию. Конфигурация сохраняется в виде обычного текстового файла в кодировке windows.
последующих версиях). Форматы файлов различаются по расширениям, поэтому, если Вы использовали нестандартное расширение, то выберите «открыть любой файл», а программа спросит Вас при помощи специального диалогового окна какого же именно формата этот файл. Далее для правильного отображения данных, расчёта параметров и расчёта шкалы спектра сигнала надо указать некоторые дополнительные сведения о данных, содержащихся в файле в таком диалоговом окне. В другой рамочке с названием «Параметры конфигурации» нажатием на кнопку «Сохр. конф.» можно сохранить текущую конфигурацию программы (язык, настройки платы, параметры измерения, внешний вид) в файл, а нажатием на кнопку «Восст. конф.» – восстановить из файла сохранённую конфигурацию. Конфигурация сохраняется в виде обычного текстового файла в кодировке windows.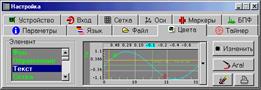 С помощью закладки «Цвета» Вы можете настроить цветовую гамму осциллографа оптимальным для себя образом. Ещё программа сохраняет 10 настраиваемых цветовых схем для Вашего максимального удобства в работе при изменении освещённости рабочего места или перемен настроения.
С помощью закладки «Цвета» Вы можете настроить цветовую гамму осциллографа оптимальным для себя образом. Ещё программа сохраняет 10 настраиваемых цветовых схем для Вашего максимального удобства в работе при изменении освещённости рабочего места или перемен настроения.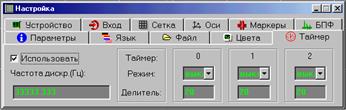 Так, если пометить галочкой квадратик слева от надписи «Использовать», программа будет использовать для программирования таймеров плат настройки с этой странички. Справа от надписи «Таймер» в ряд идут номера таймеров, которым будут соответствовать выбранные ниже режим работы и задержка (делитель). Под надписью «Частота дискр. (Гц)» впишите ту частоту дискредитации, которая будет получена при заданной Вами конфигурации перемычек на плате и режимов таймеров.
Так, если пометить галочкой квадратик слева от надписи «Использовать», программа будет использовать для программирования таймеров плат настройки с этой странички. Справа от надписи «Таймер» в ряд идут номера таймеров, которым будут соответствовать выбранные ниже режим работы и задержка (делитель). Под надписью «Частота дискр. (Гц)» впишите ту частоту дискредитации, которая будет получена при заданной Вами конфигурации перемычек на плате и режимов таймеров.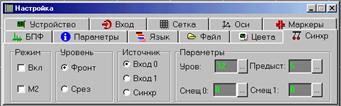
 Программа-осциллограф снабжена шкалами. Вертикальная шкала слева может быть проградуирована в МЗРах или вольтах. Единицы вертикальной оси отображаются в левом верхнем углу. Горизонтальная шкала снизу может быть как в «штуках» (иметь размер, равный количеству измеренных точек), так и в единицах времени (секундах, миллисекундах, микросекундах или наносекундах).
Программа-осциллограф снабжена шкалами. Вертикальная шкала слева может быть проградуирована в МЗРах или вольтах. Единицы вертикальной оси отображаются в левом верхнем углу. Горизонтальная шкала снизу может быть как в «штуках» (иметь размер, равный количеству измеренных точек), так и в единицах времени (секундах, миллисекундах, микросекундах или наносекундах). Значение в точке, над которой расположен курсор, подсвечивается прямоугольником, имеющим такой же цвет, как и текущий активный канал.
Значение в точке, над которой расположен курсор, подсвечивается прямоугольником, имеющим такой же цвет, как и текущий активный канал.