Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Arduino-библиотека Servo для управления сервоприводомСодержание книги
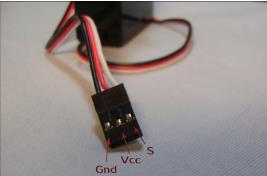
Поиск на нашем сайте Для управления сервоприводом в Arduino имеется стандартная библиотека Servo. На платах, отличных от Mega, использование библиотеки отключает возможность использования anaiogWrite() (ШИМ) на пинах 9 и 10 (вне зависимости, подключены к этим пинам сервы или нет). На платах Mega до 12 сервоприводов могут использоваться без влияния на функциональность ШИМ, но использование от 12 до 23 сервомашинок отключит ШИМ на пинах 11 и 12. Сервопривод подключается тремя проводами, как показано на рисунке 53.2: питание (Vcc), "земля" (Gnd) и сигнальный (С).
Рисунок 53.2 – Подключение сервопривода
Питание — красный провод, он может быть подключен к выводу +5 В на плате Arduino. Черный или коричневый провод — "земля" подключается к выводу Arduino GND, сигнальный (оранжевый/желтый/белый) провод подключается к цифровому выводу контроллера Arduino. Следует отметить, что мощные сервоприводы могут создавать большую нагрузку — в этом случае их следует запитывать отдельно (не через выход +5 В Arduino). То же самое верно для случая подключения сразу нескольких сервоприводов. Набор функций библиотеки Servo: - attach(int); - detach(); - write(int); - attached()
Функция attach() Функция attach() подключает переменную servo к указанному выходу, с которого осуществляется управление приводом. Синтаксис: servo.attach(pin) servo.attach(pin, min, max) Параметры: - pin — номер выхода, к которому подключаем сервопривод и с которого осуществляется управление приводом; - min — ширина импульса в микросекундах, соответствующая минимальному (угол 0 градусов) положению сервопривода; - max — ширина импульса в микросекундах, соответствующая максимальному (угол 180 градусов) положению сервопривода. Возвращаемого значения нет.
Функция detach() Функция detach() отсоединяет переменную servo от подключенного функцией attach() выхода. Если все переменные servo отсоединены, то выходы 9 и 10 могут быть использованы в режиме ШИМ с помощью analogWrite(). Синтаксис: servo.detach() Параметров нет. Возвращаемого значения нет.
Функция write(int) Функция write (int) передает значения для управления приводом. Для стандартного сервопривода это угол поворота. Для привода постоянного вращения функция задает скорость вращения: 0 — для максимальной скорости вращения в одну сторону, 180 — для максимальной скорости в другую сторону и около 90 для неподвижного состояния. Синтаксис: servo.write(angle) Параметр: angle — значение, записываемое в servo (от 0 до 180). Возвращаемого значения нет.
Функция writeMicrosconds(int) Функция writeMicrosconds(int) передает значение для управления сервоприводом в микросекундах (uS), устанавливая угол поворота на это значение. Для стандартного привода: значение 1000 — максимальный поворот против часовой стрелки, 2000 — максимальный поворот по часовой стрелке, 1500 — посередине. Синтаксис: servo.writeMicrosconds (uS) Параметр: uS — значение в микросекундах. Возвращаемого значения нет. Функция read() Функция read () считывает значение текущего положения сервопривода (значение, записанное последним вызовом функции write()). Синтаксис: servo.read() Параметров нет. Возвращаемое значение: angle — положение (угол) сервопривода от 0 до 180. Функция attached() Функция attached() проверяет, подключена ли переменная Servo к выходу. Синтаксис: servo.attached() Параметров нет. Возвращаемые значения: true — если подключена, false — в противном случае.
Контрольные вопросы: 1. Как устроен сервопривод? 2. Объяснить принцип работы сервопривода. 3. Какие существуют типы сервоприводов по управлению? Назвать их особенности. 4. Для чего предназначена библиотека Servo? 5. Какие и с какой целью используются функции библиотеки Servo? 6. Как осуществляется подключение серводвигателя к плате Arduino?
|
||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 398; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.60 (0.007 с.) |