Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Датчики положения: потенциометрические датчики, вращающиеся трансформаторы, резольвер, индуктосин, сельсин.Содержание книги
Поиск на нашем сайте Для следящих приводов робота для измерения положения используют аналоговые и цифровые датчики. Для измерения положения(угла) в ПР обычно используются: аналоговые(потенциометрические датчики, вращающиеся трансформаторы, резольверы, индуктосины). эти датчики относятся к аналоговым датчикам, а кодовые и импульсные – к цифровым датчикам. Из индукционных датчиков широко используются вращающиеся трансформаторы и сельсины.
Потенциометрические датчики: Они преобразуют угловое движение aдвиж в выходное напряжение. На выводы потенциометра подается постоянное или переменное напряжение. В потенциометрических датчиках используются проволочные или пленочные потенциометры. Статическая характеристика Uвых=f(a)-зависимость выходного напряжения от положения-нелинейна. Нелинейность тем выше, чем выше b=Rн/R, где Rн-активное сопротивление нагрузки, R-сопротивление потенциометра. Чувствительность потенциометрического датчика – 3..5 ·10-3 В/мм. Точность проволочных датчиков может составлять 0,05%. Их недостаток из-за дискретного изменения сопротивления при перемещении щетки движка получается ступенчатая характеристика. Для обеспечения стабильности работы датчики должны иметь сопротивление R больше 1000 Ом. Стабильность характеризуется температурным коэффициентов.
Вращающиеся трансформаторы -это электрические машины переменного тока с неявно выраженными полюсами. В статоре и роторе укладываются 2 взаимно перпендикулярных обмотки. При подаче в одну из первичных обмоток синусно-косинусного вращающегося переменного напряжения, во вторичных обмотках наводятся ЭДС, изменяющиеся по закону. Резольвер -это специальная электрическая машина переменного тока, у которого определенным образом включены статорные и роторные обмотки. Схема ротора с двухфазной статорной и однофазной роторной обмоткой. Статорные обмотки взаимно перпендикулярны.
Между напряжением на роторной и статорной обмотках имеется следующая взаимосвязь. Фазовый сдвиг напряжения в обмотках статора соответствует углу поворота ротора j, который связан с объектом измерения. Резольверы используются в качестве датчиков обратной связи в цифровых системах управления. Индуктосин -это датчик, используемый для измерения линейных перемещения. Его принцип действия тот же, как и у резольвера.
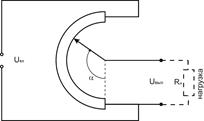
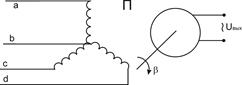
Сельсин -используется для измерения угла, представляет собой электрическую машину с однофазной обмоткой возбуждения на роторе, питаемой переменным напряжением возбуждения Uв и трехфазной статорной обмоткой. Поле ротора наводит в обмотках фаз статора ЭДРС переменного тока, частота которого равна частоте питания Uв, а величина напряжения зависит от положения ротора. в системах ЭП сельсины работают в трансформаторном режиме и содержат элементы сельсин-датчик и сельсин-приемник.
Переменное напряжение Uв подается в обмотку ротора Д. Обмотки статоров датчика и приемника соединены. ЭДС, наводимая в фазах датчика, зависящая от положения ротора, создает токи в обмотках фаз статора приемника. В результате в зависимости от положения ротора приемника в нем индуцируется ЭДС. Таким образом, на выходе получается напряжение, которое зависит от угла рассогласования: Uвых=Umax·sin(b-a). При согласовании положения роторов датчика и приемника напряжение на выходе Uвых=0. Существуют контактные и бесконтактные конструкции сельсинов. Статическая характеристика при малых углах рассогласования близка к линейной. Чувствительность их 1В/град, погрешность измерения γ ± 20-30 минут, в динамике сельсины аналогичны безинерционным звеньям. Датчики скорости. Тахогенераторы постоянного того (ТГ ПТ) и асинхронные тахогенераторы (АТГ). При прямом способе измерения скорости движения применяют тахогенераторы, при косвенном способе измерения информацию о скорости получают через другие величины, более доступные для измерения. Тахогенераторы. В качестве ДС в ЭП ПР применяют тахогенераторы (ТГ) постоянного тока и асинхронные тахогенераторы. Возможно применение и дифференциального трансформаторного датчика. Конструктивно чаще всего ТГ встраивается в двигатель и измеряет угловую скорость вращения вала двигателя. ТГ представляет собой электрическую машину постоянного тока или асинхронную машину, вал которого соединен с выходным валом двигателя. Угловая скорость измеряется, а выходное напряжение пропорционально угловой скорости. ТГ ПТ по принципу действия и конструктивному исполнению являются обычными электрическими машинами ПТ, работающими в генераторном режиме. возбуждение осуществляется либо от ПМ, либо от обмотки возбуждения.РИСУНОК Для приводов, работающих на переменном токе, можно использовать ТГ переменного тока. Они представляют собой электрические машины переменного тока с короткозамкнутым или полым немагнитным ротором. Две статорные обмотки укладываются в пазы статора таким образом, что они смещены на 90 град, т.е.чтобы их магнитные оси были взаимно перпендикулярны. Одна из обмоток является возбуждающей и подключается к источнику питания переменного тока, другая обмотка-выходной. Чувствительность ТГПТ 15…25 мВ/(об/мин), чувствительность АТГ 2…5 мВ/(об/мин). Точность измерения частоты вращения 0,5…2,5%, для прецезионных ТГ 0,05…0,1%. дополнительная погрешность температурная не превышает 0,4%. Выходное напряжение ТГПТ составляет 50В. Выходное напряжение АТГ 10…60В. В динамике ТГ описывается передаточной функцией апериодического звена
|
||
|
|
Последнее изменение этой страницы: 2021-03-10; просмотров: 286; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.006 с.) |


 , где
, где  -коэффициент трансформации. Статическая характеристика синусная ВТ (косинусная), но при малых углах (порядка 5 град с точностью до 0,1%) ее можно считать линейной. Статическая характеристика может отклоняться от синусности из-за технологических и конструктивных факторов. Эта погрешность для разных СКВТ составляет 0,02…0,2%. Точность измерения углов СКВТ довольно высока, для некоторых типов трансформаторов погрешность ±2I…3I. В динамике ВТ можно рассматривать безинерционные звенья. Недостаток: низкая помехозащищенность, необходимость в питании переменным током, высокая стоимость.
-коэффициент трансформации. Статическая характеристика синусная ВТ (косинусная), но при малых углах (порядка 5 град с точностью до 0,1%) ее можно считать линейной. Статическая характеристика может отклоняться от синусности из-за технологических и конструктивных факторов. Эта погрешность для разных СКВТ составляет 0,02…0,2%. Точность измерения углов СКВТ довольно высока, для некоторых типов трансформаторов погрешность ±2I…3I. В динамике ВТ можно рассматривать безинерционные звенья. Недостаток: низкая помехозащищенность, необходимость в питании переменным током, высокая стоимость.
 (1), где КТ- коэффициент трансформации, φ-угол поворота ротора. Если на статорной обмотке подавать синусоидальное напряжение с одинаковыми амплитудами и фазовым сдвигом π/2, то
(1), где КТ- коэффициент трансформации, φ-угол поворота ротора. Если на статорной обмотке подавать синусоидальное напряжение с одинаковыми амплитудами и фазовым сдвигом π/2, то  ;
;  . В соответствие с выражением 1 можно записать, что
. В соответствие с выражением 1 можно записать, что 


 , где КТГ-передаточный коэффициент ТГ, ТТГ-постоянная времени ТГ.
, где КТГ-передаточный коэффициент ТГ, ТТГ-постоянная времени ТГ.