Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Коробки скоростей с бесступенчатым регулированиемСодержание книги
Поиск на нашем сайте Для бесступенчатого регулирования скорости в основном применяют двигатели постоянного тока с тиристорной системой управления. Эти двигатели все шире используют в станках с ЧПУ, а также в многооперационных станках с ЧПУ и АСИ [10, 11]. В таких двигателях диапазон регулирования скорости с постоянной мощностью находится в пределах R б = (R д)p = 2,5-6 (иногда до 8-10), что не перекрывает всего требуемого диапазона регулирования на шпинделе с постоянной мощностью R р. Частоты вращения при постоянном моменте (R д)м регулируют в очень широком диапазоне. Перспективным является применение бесколлекторных электродвигателей постоянного тока, что повышает их надежность. В приводе главного движения используют и регулируемые за счет изменения частоты тока асинхронные электродвигатели, у которых
где f – частота тока; р – число пар полюсов; S – скольжение. Эти двигатели обладают высокой надежностью, жесткой характеристикой и обеспечивают регулирование с постоянной мощностью во всем диапазоне. Так как диапазон бесступенчатого регулирования R б механических вариаторов или диапазон (R д)p регулируемых двигателей значительно меньше требуемого диапазона регулирования частот вращения шпинделя Rn или Rp при системах комбинированного регулирования, между устройством для бесступенчатого регулирования и шпинделем вводят обычно ступенчатую коробку. При этом должно выполняться условие
Rn = R б Rк,
где R к – диапазон регулирования коробки скоростей, т.е. коробку скоростей можно рассматривать как переборную группу, расширяющую диапазон регулирования привода, и можно записать
φк = R к-1φ = R б φ. С учетом того, что при бесступенчатом регулировании φ ® 1, необходимо, чтобы φк = R d. Следовательно,
окончательно
что позволяет определить число ступеней коробки скоростей
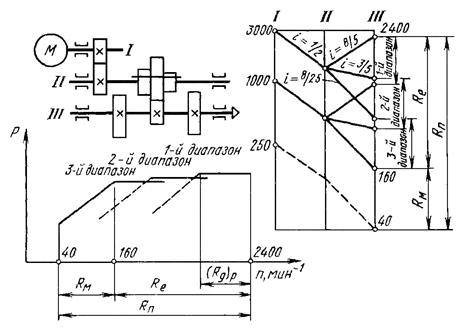
Вследствие переменного скольжения в электродвигателях, механических вариаторах, ременных передачах фактический диапазон регулирования бесступенчатого устройства может оказаться меньше R d, поэтому во избежание разрыва бесступенчатого ряда оборотов на шпинделе принимают обычно φк = (0,94…0,97) R б. Если коробка скоростей выполнена в виде одной группы передач, то для привода без перекрытия при z к = 2 можно обеспечить диапазон регулирования Привод с z к = 4 = 20 · 21 позволяет получить При вычислении z к и округлении его значения в бóльшую сторону перекрытие скоростей получается автоматически. В качестве примера на рис. 3.4 изображены кинематическая схема, график частот вращения и диаграмма мощности привода с z к = 3 при В приводе получается перекрытие скоростей, так как В многооперационных станках с числовым управлением иногда сокращают число ступеней скорости, округляя z к в меньшую сторону, что приводит к небольшому разрыву в средней части диапазона регулирования. Если применен двигатель постоянного тока с двухзонным регулированием, то в этом интервале возможно регулирование частоты при постоянном моменте. На рис. 3.5 приведены график частот вращения и диаграмма мощности привода, построенного для предыдущего примера при z к = 2. Такой прием упрощает механическую часть привода, однако, он возможен, если технологические операции, осуществляемые в средней части диапазона, не требуют полной мощности, либо их возможно осуществить на заниженных режимах обработки без существенного снижения производительности.
Рис. 3.4. Привод главного движения станка с регулируемым двигателем: а – кинематическая схема; б – график частот вращения; в – диаграмма мощности
Рис. 3.5. Привод главного движения станка с регулируемым двигателем при уменьшенном числе передач в коробке (z к = 2): а – график частот вращения; б – диаграмма мощности
Следует учитывать, что в станках с числовым управлением при применении двигателей постоянного тока регулирование скоростей часто ведется не бесступенчато, а ступенчато с малым φ (обычно φ = 1,12, реже φ = 1,06). В этом случае упрощается управление приводом, а потеря экономически выгодной скорости незначительна. Широко применяют структуры с перебором, позволяющие расширить общий диапазон регулирования и получить другие преимущества, свойственные этой структуре.
3.4.3. Коробки скоростей со сложенной структурой Обычная множительная структура, состоящая из одной кинематической цепи с последовательным соединением групп передач, является наиболее простой. Она позволяет создавать рациональные приводы главного движения. Однако во многих случаях, особенно при увеличении диапазона регулирования скоростей, создать простой привод, удовлетворяющий требованиям, на базе обычной структуры невозможно. Поэтому в практике станкостроения применяют так называемые сложенные структуры – структуры многоскоростного привода, состоящие из двух или более кинематических цепей, каждая из которых является обычной множительной структурой. Одна из этих цепей (короткая) предназначена для высоких скоростей привода, другие (более длинные) – для низких скоростей [6]. Множительные структуры состоят чаще всего из двух, реже из трех кинематических цепей. Общее число скоростей привода для структуры, состоящей из двух цепей, Для объединения составляющих структур в одну – сложенную в схему привода – вводят соединительные передачи. Наиболее распространенные принципиальные схемы соединения двух структур представлены на рис. 3.7. Верхнюю область регулирования скоростей вращения шпинделя получают при помощи основной структуры z о и передают движение на шпиндель I через зубчатую передачу
б)
а) в) Рис. 3.7. Схемы соединения множительных структур
На рис. 3.8 показана простая схема коробки скоростей со сложенной структурой. Здесь сложены две кинематические цепи, структуры которых:
Рис. 3.8. Схема коробки скоростей со сложенной структурой
Для нашего случая р a = 31; р b = 23 и рс = р d = 1. Поэтому На рис. 3.9 показано графическое сложение структур для рассматриваемой коробки скоростей. На рис. 3.9, а представлены отдельно сетки для каждой структуры. Первая обеспечивает ряд
а) б) в) Рис. 3.9. Структурная сетка и график частот вращения коробки скоростей со сложенной структурой
На рис. 3.10 показана другая схема коробки скоростей со сложенной структурой. Вращение от вала I к валу II сообщает группа колес р a. Далее движение на шпиндель V передается по двум цепям: при левом и среднем положениях блока
Для нашего случая р a = 31; р b = 23; рс = 1; р d = 1 и р e = 23. Следовательно, Ha рис. 3.7, в условно показана принципиальная структура, состоящая из трех кинематических цепей: основной z о и двух дополнительных z д1 и z д2.
Рис. 3.10. Схема коробки скоростей со сложенной структурой
Сложенные структуры обладают рядом достоинств. Они могут обеспечить большое число ступеней скорости при широком диапазоне регулирования. Высокие скорости передаются короткими кинематическими цепями, что уменьшает потери мощности и повышает КПД. Это видно из графиков, показанных на рис. 3,9, б, в: верхняя область частот вращения осуществляется цепью, состоящей только из двух групп. И, наконец, сложенные структуры дают возможность получить любое число ступеней скорости, не только кратное 2 и 3, например,
3.4.4. Особые множительные структуры В ряде случаев целесообразно, отклоняясь от классических принципов, упрощать схему привода. Длительная работа станка без изменения частоты вращения шпинделя позволяет использовать в качестве множительной группы звено настройки со сменными колесами. Последние обычно включены в цепь постоянных передач в зависимости от степени редукции или в коробку передач со сравнительно малым количеством ступеней скорости. Например, в коробке, представленной на рис. 3.11, первая группа состоит из сменных колес a – b, а вторая и третья содержат по две пары передач. Следовательно, имеется возможность ступенчатого регулирования частоты вращения шпинделя путем переключения блоков, а установка сменных колес смещает область регулирования вдоль ряда частот вращения [6].
Рис. 3.11. Привод главного движения со сменными колесами Сменные колеса желательно размещать в первой основной группе, так как число пар колес может быть большим (2-10). Сменные колеса следует подбирать так, чтобы каждая пара могла быть использована дважды, с переменой мест ведущего и ведомого колес. Поэтому нет необходимости иметь пару колес с
Рис. 3.12. График частот вращения для сменных колес
Если принять для коробки скоростей (см. рис. 3.11)
Множительные структуры с измененными характеристиками групп передач. Нередко причиной отказа от обычной множительной структуры является высокое значение характеристики последней группы и, в связи с этим, недопустимо малое передаточное отношение одной из передач. Путем искусственного уменьшения характеристик можно с некоторыми отклонениями сохранить желаемую структуру. Примем для примера Рассмотрим другой случай, вернувшись к схеме
Рис. 3.13. График частот вращения шпинделя с повторяющимися угловыми скоростями
а) б)
Рис. 3.14. График частот вращения шпинделя коробки скоростей с измененными Характеристиками передач
С эксплуатационной точки зрения желательно иметь более тонкое регулирование на малых скоростях и более грубое – на больших. На рис. 3.14, б показан вариант такого расчета. Суть его заключается в том, что в последней группе передач имеются две характеристики: Коробки скоростей со связанными колесами применяют для уменьшения количества зубчатых колес и осевых размеров коробок скоростей. Сущность данного метода заключается в следующем. Пусть коробка скоростей, изображенная на рис. 3.15, а, имеет две группы передач:
а) б) в)
Рис. 3.15. Схемы коробок скоростей со связанными колесами
Пусть
Расчеты показали, что при
при условии меньшего передаточного отношения
а) б)
Рис. 3.16. График частот вращения механизмов с одним связанным колесом
Таким образом, выбор варианта связывания заключается в следующем. Если передачи, содержащие связанное колесо, в первой и второй группах симметричны, т.е.
а) б)
Рис. 3.17. Структурные сетки коробок скоростей с двухскоростным электроприводом для На рис. 3.15, в показана схема с двумя связанными колесами, полученная путем объединения колес
В коробках скоростей с приводом от многоскоростных электродвигателей переменного тока в основном применяют двухскоростные со знаменателем ряда Двухскоростной электродвигатель можно условно рассматривать как «электрическую группу», состоящую из двух передач. Характеристика
Для получения нормальной структуры привода без перекрытия частот вращения необходимо выбирать такую структуру коробки скоростей, при которой Пример 1. Дано 1. Для 2. Известную нам структурную формулу 3. Строим структурную сетку (рис. 3.17, а). Первая группа – «электрическая» с Таблица 3.4
Частоты вращения вала электродвигателя при
Пример 2. Дано 1. Поскольку 2. Строим структурную сетку (см. рис. 3.17, б) на основании табл. 3.4 для
Выбор наилучшего варианта коробки скоростей довольно сложен [6]. Здесь большое значение имеют группы и типы станков, их техническая характеристика, степень универсальности, точность и другие конкретные параметры. Поэтому при проектировании коробок скоростей нередко возникает ряд вариантов, из которых выбирают наивыгоднейший. Из всех вариантов кинематической структуры привода, дающих одно и то же число скоростей, оптимальным является тот, который имеет наибольшую простоту, минимальное число групп передач, наименьшее количество зубчатых колес, валов, муфт и других деталей. Масса привода и его размеры должны быть по возможности наименьшими. Из всех кинематических вариантов наиболее выгодным является такой, при котором характеристика групп увеличивается от первого вала коробки скоростей к шпинделю. В большинстве случаев лучшими вариантами являются «веерообразные» структуры, так как в области высоких частот вращения работает большое количество деталей привода. Главная редукция осуществляется на последней ступени, поэтому валы, зубчатые колеса и другие детали привода имеют меньшие размеры, так как при данной мощности передают меньшие крутящие моменты. На высоких ступенях скорости, особенно у универсальных станков с широким диапазоном регулирования, снижается КПД. Поэтому при выборе кинематического варианта следует стремиться к сложенной структуре, обеспечивающей получение высоких частот вращения шпинделя по более короткой кинематической цепи. Средством уменьшения радиальных размеров служит условие Использование связанных колес упрощает схему, однако в ряде случаев может увеличить размеры привода.
|
|||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-11-11; просмотров: 1054; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.64 (0.015 с.) |
|||||||||||||||||||||||||||||||||||||||||

 ,
, ,
, ,
, или
или  .
. , если R б < 8; при z к = 3
, если R б < 8; при z к = 3  , если
, если  (если R б > 2,8, то в приводе получается перекрытие скоростей и
(если R б > 2,8, то в приводе получается перекрытие скоростей и  ).
). , если R б < 2,8 (при R б > 2,8 получается перекрытие и
, если R б < 2,8 (при R б > 2,8 получается перекрытие и  ).
).
 .
. округлено в большую сторону до z к = 3.
округлено в большую сторону до z к = 3.

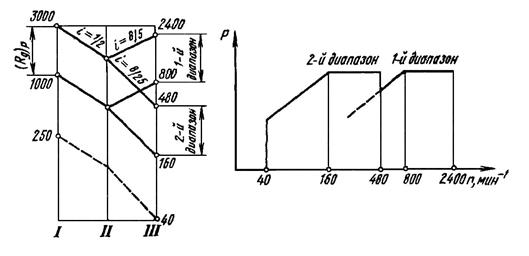
 На рис. 3.6 изображен график частот вращения привода главного движения многооперационного станка.
На рис. 3.6 изображен график частот вращения привода главного движения многооперационного станка. , где
, где  и
и  – число ступеней первой и второй кинематических цепей. Если цепи имеют одинаковые группы передач (по количеству и характеристике), то их можно объединить в общую цепь. Пусть z о – число скоростей общих передач,
– число ступеней первой и второй кинематических цепей. Если цепи имеют одинаковые группы передач (по количеству и характеристике), то их можно объединить в общую цепь. Пусть z о – число скоростей общих передач,  , а
, а  ; тогда
; тогда  . Общую часть структуры z о, используемую для получения всех скоростей, называют основной, z д – дополнительной.
. Общую часть структуры z о, используемую для получения всех скоростей, называют основной, z д – дополнительной. (рис. 3.7, а) или через муфту 1 (рис. 3.7, б). Нижнюю область регулирования обеспечивают последовательным соединением основной z о и дополнительной z д структур соединительной передачей (на схеме показано условно).
(рис. 3.7, а) или через муфту 1 (рис. 3.7, б). Нижнюю область регулирования обеспечивают последовательным соединением основной z о и дополнительной z д структур соединительной передачей (на схеме показано условно).
 и
и  . Группы колес р a и р b являются общими и поэтому образуют основную структуру
. Группы колес р a и р b являются общими и поэтому образуют основную структуру  ; они вращают полый вал III. Далее движение шпинделю V от первой цепи передается с помощью муфты, а от второй цепи – через звено возврата (перебор) с колесами
; они вращают полый вал III. Далее движение шпинделю V от первой цепи передается с помощью муфты, а от второй цепи – через звено возврата (перебор) с колесами  и
и  , которые играют роль соединительных передач. Общее число скоростей привода
, которые играют роль соединительных передач. Общее число скоростей привода .
.

 .
. , вторая – ряд
, вторая – ряд  . Условимся муфты изображать штриховым лучом (на структурной сетке он может занимать любое положение, на графике частот вращения – только горизонтальное). Тогда все точки, изображающие частоты вращения вала III, соединим горизонтальными штриховыми лучами с точками
. Условимся муфты изображать штриховым лучом (на структурной сетке он может занимать любое положение, на графике частот вращения – только горизонтальное). Тогда все точки, изображающие частоты вращения вала III, соединим горизонтальными штриховыми лучами с точками  . Наносим последнюю на сложенную сетку (рис. 3.9, б). Точки, изображающие частоты вращения вала III, располагаются в верхней части графика. Соединяем их штриховыми линиями с точками
. Наносим последнюю на сложенную сетку (рис. 3.9, б). Точки, изображающие частоты вращения вала III, располагаются в верхней части графика. Соединяем их штриховыми линиями с точками 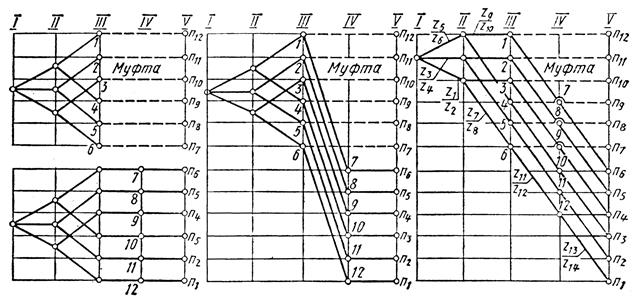
 – через передачи
– через передачи  или
или  (группа р b); при правом положении блока – группой передач рс, р d и р e. Таким образом, число ступеней скоростей
(группа р b); при правом положении блока – группой передач рс, р d и р e. Таким образом, число ступеней скоростей .
. .
.

 ;
;  ;
;  и т.д.
и т.д.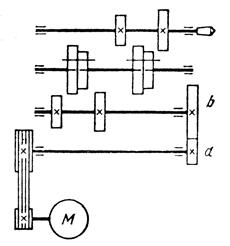
 . График частот вращения нужно строить по возможности симметричным (рис. 3.12).
. График частот вращения нужно строить по возможности симметричным (рис. 3.12).
 , то число ступеней скорости при этой простой схеме
, то число ступеней скорости при этой простой схеме  .
. и построим график для структуры
и построим график для структуры  (рис. 3.13). Из графика следует, что
(рис. 3.13). Из графика следует, что  . Но одновременно с этим уменьшились диапазон регулирования
. Но одновременно с этим уменьшились диапазон регулирования  и число ступеней скорости (
и число ступеней скорости ( ), так как две скорости (на графике отмечены двойными кружками) повторяются.
), так как две скорости (на графике отмечены двойными кружками) повторяются. . Увеличим характеристики первой и второй групп до значений
. Увеличим характеристики первой и второй групп до значений  и
и  . Структура примет вид
. Структура примет вид  . Строим график частот вращения (рис. 3.14, а). Он свидетельствует о сохранении минимального передаточного отношения и одновременно о расширении диапазона регулирования
. Строим график частот вращения (рис. 3.14, а). Он свидетельствует о сохранении минимального передаточного отношения и одновременно о расширении диапазона регулирования  путем исключения отдельных скоростей в нижней и верхней частях ряда, где знаменатель принимает ветчину
путем исключения отдельных скоростей в нижней и верхней частях ряда, где знаменатель принимает ветчину  . Такой ряд называют ломаным. Если, например,
. Такой ряд называют ломаным. Если, например,  , то диапазон регулирования при обычном кинематическом варианте
, то диапазон регулирования при обычном кинематическом варианте  и
и  , а в данном случае
, а в данном случае  и
и  .
.
 для колес
для колес  и
и  для колес
для колес  . Такая комбинация дает по
. Такая комбинация дает по  включительно геометрический ряд со знаменателем
включительно геометрический ряд со знаменателем  , а выше – со знаменателем
, а выше – со знаменателем  .
. ,
,  ,
,  и
и  ,
,  ,
,  и
и  так, чтобы они были одинаковыми
так, чтобы они были одинаковыми  , то представляется возможным оба колеса объединить в одно
, то представляется возможным оба колеса объединить в одно  (рис. 3.15, б). Оно одновременно принадлежит и первой, и второй группам, работает в качестве и ведомого, и ведущего звеньев. Подобные колеса называют связанными. По этой схеме строят коробки скоростей типа АКС [20].
(рис. 3.15, б). Оно одновременно принадлежит и первой, и второй группам, работает в качестве и ведомого, и ведущего звеньев. Подобные колеса называют связанными. По этой схеме строят коробки скоростей типа АКС [20].
 и
и  представляют собой передаточные отношения передач, содержащих связанное колесо. Обозначим через
представляют собой передаточные отношения передач, содержащих связанное колесо. Обозначим через  и
и  наибольшее количество отрезков
наибольшее количество отрезков 
 ; при
; при 
 ; при
; при 
 . Если связанным колесом является минимальное, то
. Если связанным колесом является минимальное, то . (3.1)
. (3.1) можно уменьшить величину
можно уменьшить величину  до значения
до значения (3.2)
(3.2) .
.

 (а) и
(а) и  (б)
(б) с
с  с
с  (см. рис. 3.15, б). При этом значительно сокращаются осевые размеры передачи. Но такие механизмы при обычных расчетах обеспечивают геометрический ряд частот вращения при числе зубьев колес, выходящем за принятые пределы.
(см. рис. 3.15, б). При этом значительно сокращаются осевые размеры передачи. Но такие механизмы при обычных расчетах обеспечивают геометрический ряд частот вращения при числе зубьев колес, выходящем за принятые пределы. . При данном способе регулирования приемный вал коробки скоростей получает две угловые скорости, и число механических ступеней в связи с этим сокращается вдвое:
. При данном способе регулирования приемный вал коробки скоростей получает две угловые скорости, и число механических ступеней в связи с этим сокращается вдвое:  . Помимо упрощения механической части привода, появляется возможность переключения скорости на ходу [6].
. Помимо упрощения механической части привода, появляется возможность переключения скорости на ходу [6]. группы может быть найдена исходя из следующих рассуждений. Поскольку скорость вращения шпинделя при переключении электродвигателя с меньшей частотой вращения на большую увеличивается вдвое (
группы может быть найдена исходя из следующих рассуждений. Поскольку скорость вращения шпинделя при переключении электродвигателя с меньшей частотой вращения на большую увеличивается вдвое ( ), то характеристика
), то характеристика  . Для стандартных значений
. Для стандартных значений  принимается следующей:
принимается следующей: . Поэтому от выбранного значения знаменателя ряда
. Поэтому от выбранного значения знаменателя ряда  ;
;  . В качестве электропривода применен двухскоростной электродвигатель трехфазного переменного тока
. В качестве электропривода применен двухскоростной электродвигатель трехфазного переменного тока  . Требуется построить структурную сетку.
. Требуется построить структурную сетку. характеристика
характеристика  ; следовательно, в структурной формуле ее изображает множитель 23.
; следовательно, в структурной формуле ее изображает множитель 23. можно для рассматриваемого случая переписать как
можно для рассматриваемого случая переписать как  . Отсюда следует, что коробка скоростей должна иметь структуру
. Отсюда следует, что коробка скоростей должна иметь структуру  . В табл. 3.4 представлено распределение частот вращения при
. В табл. 3.4 представлено распределение частот вращения при  и
и  .
. (на рисунке они выделены линиями разной толщины). Частоты вращения n 1, n 2, n 3, n 7, n 8 и n 9 получаются при минимальной частоте вращения электродвигателя n min, а n 4, n 5, n 6, n 10, n 11 и n 12 – при максимальной частоте вращения
(на рисунке они выделены линиями разной толщины). Частоты вращения n 1, n 2, n 3, n 7, n 8 и n 9 получаются при минимальной частоте вращения электродвигателя n min, а n 4, n 5, n 6, n 10, n 11 и n 12 – при максимальной частоте вращения  .
. и
и 




 . Построить структурную схему.
. Построить структурную схему. , а характеристика
, а характеристика  , то в структурной формуле ее изображает множитель 22, а это может быть в варианте
, то в структурной формуле ее изображает множитель 22, а это может быть в варианте  .
. , которое приводит к симметричному расположению линий, изображающих передачи на графиках частот вращения. Другим средством является совмещение осей валов смежных групп передач. Для уменьшения осевых размеров располагают одиночные передачи среди групповых.
, которое приводит к симметричному расположению линий, изображающих передачи на графиках частот вращения. Другим средством является совмещение осей валов смежных групп передач. Для уменьшения осевых размеров располагают одиночные передачи среди групповых.