Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование динамических режимов работы ЭПСодержание книги
Поиск на нашем сайте
Математическая модель привода. Для определения характера прохождения переходных процессов системы в переходных режимах необходимо определить коэффициенты характеристического уравнения системы в операторной форме: где ТМ – механическая постоянная времени системы; ТЭ – электромагнитная постоянная времени. Определить постоянные времени можно с помощью следующих выражений:
где
а это значит, что переходные процессы в системе должны иметь колебательный характер. Выбор модели и моделирование переходных процессов. Для моделирования ЭП используется система MatLab (матричная лаборатория) с расширением (Toolboxes). Основными пакетами расширения, используемыми для исследовании ЭП, являются Simulink и Power System Blockset. В исследуемую модель (рис. 2.19) вошли такие элементы: - Asynchronous Machine SI Unit – модель асинхронного двигателя с номинальными паспортными данными двигателя 5А – 5АМ315M4У3 (задание параметров рис. 2.18); - 3 источника синусоидального напряжения AC Voltage Sourse с номинальными параметрами: f =50 Гц, Um =311 В; сдвинутые по фазе друг относительно друга на 1200; - Three-Phase V-I Measurement – трехфазный мультиметр для замеров сетевого тока и напряжения; - 2 элемента типа Scope – модели осциллографов для просмотра графиков сетевых тока и напряжения, а также изменения во времени частоты вращения ротора двигателя и момента на его валу; - 2 элемента типа Display для контроля установившегося значения тех же параметров; - Step – элемент, с помощью которого, возможно смоделировать наброс нагрузки на вал двигателя в определенный момент времени.
Рис. 2.18. Блок задания параметров асинхронного двигателя
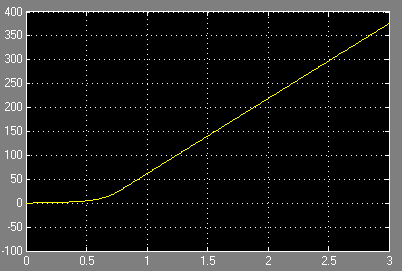
Моделируем пуск двигателя без нагрузки при трех различных частотах питающего напряжения f 1 =50 Гц, f 2 =37,5 Гц, f 3 =25 Гц, используя закон частотного регулирования При f =50 Гц и U л =380 В; при f =37,5 Гц и U л =329 В; при f =25 Гц и U л =269 В. При частоте питающей сети f =50 Гц и линейном напряжении U л =380 В получаем следующие графики переходных процессов ω= f (t) (рад/с) и M в = f (t) (Нм).
а
б Рис. 2.20. Графики при частоте питательной сети f = 50 Гц: а – ω = f (t); б – M в = f (t)
После окончания переходного процесса получаем такие установившиеся значения: ω =157,1 рад/с; I 1 =60 А; M в =27,2 Нм. При частоте сети f =37,5 Гц и линейном напряжении U л =329 В получаем следующие графики переходных процессов ω = f (t) (рад/с) и M в = f (t) (Нм).
а
б
Рис. 2.21. Графики при частоте питательной сети f = 37,5 Гц: а) ω = f (t); б) M в = f (t)
После окончания переходного процесса получаем такие установившиеся значения: ω =117,8 рад/с; I 1 =120 А; M в =7,665 Нм при частоте питающей сети f =25 Гц и линейном напряжении U л =269 В получаем следующие графики переходных процессов ω= f (t) (рад/с) и M в = f (t) (Нм). После окончания переходного процесса получаем такие установив
а
б
Рис. 2.22. Графики при частоте сети f =37,5 Гц и f =25 Гц: а – ω= f (t); б – M в = f (t)
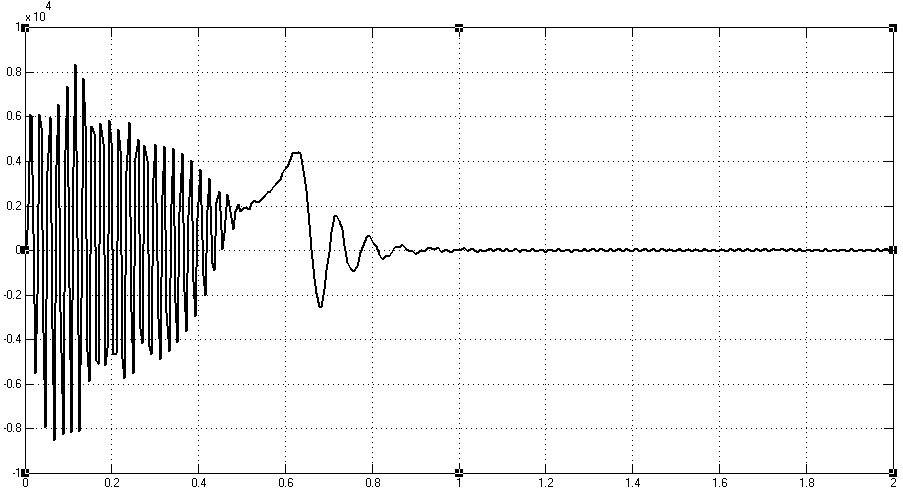
При частоте питающей сети f=50 Гц и линейном напряжении Uл=380 В смоделируем переход системы из одного установившегося состояния (Мв = Мн = 73 Н·м, ω = ωн = 101,7 рад/с, I1 = I1н = 15,65 А) в другое после наброса нагрузки на вал двигателя (Мс.доп.= 0,3Мн = 22 Нм).
Рис. 2.23. Наброс нагрузки Мс.доп.=0,3Мн
После окончания переходного процесса получаем такие установившиеся значения: ω =99,7 рад/с; I 1 =20,06 А; M в =95,5 Н·м. Для более детального изучения переходного процесса на рис. 2.24. приведена увеличенная часть графиков ω= f (t) (рад/с) и M в= f (t) (Нм), охватывающая только момент замедления двигателя после наброса дополнительной нагрузки.
Рис. 2.24. Наброс нагрузки Мс.доп.=0,3Мн (фрагмент) Пример 2.13. Расчёт параметров двигателя и моделирование Характеристик
Исходя из задания выбираем асинхронный двигатель серии 5А – 5АМ315M4У3. Основные характеристики приведены в табл. 2.7. Таблица 2.7. Параметры асинхронного двигателя серии 5А
В
Внешний вид двигателя серии 5А приведен на рис.2.25
Рис. 2.25. Двигатель серии 5А Для защиты двигателей в аварийных режимах, следствием которых может быть нагрев обмотки до недопустимой температуры, двигатель комплектуется встроенными температурными датчиками (полупроводниковые терморезисторы с положительным температурным коэффициентом – позисторы). Датчики встраиваются в лобовые части обмотки статора со стороны, противоположной вентилятору наружного обдува, по одному в каждую фазу, соединяются последовательно, концы цепи датчиков выводятся на клеммы в коробке выводов. К этим клеммам подключают реле или иной аппарат, реагирующий на сигнал датчиков. Этот двигатель обеспечивает подачу насоса 750 м3/час при напоре 100 м.в.ст.. Т-образная схема замещения (рис. 2.26) АД и таблица параметров (табл. 2.28) приведены ниже. Рассчитываем параметры АД: - Номинальная скорость вращения двигателя: - Скорость вращения на ХХ: - Частота вращения на ХХ: - Номинальное скольжение: С помощью программы Matlab рассчитаем параметры для T-образной схемы замещения:
Рис. 2.26. Т-образная схема замещения АД
Таблица 2.8 Параметры схемы замещения
Соберём модель двигателя (при непосредственном питании от сети переменного тока 380, В) в Matlab в Simulink приведена на рис. 2.27.
Рис. 2.27. Модель двигателя в Simulink
Рассчитанные параметры схемы замещения вводим в блок, являющийся моделью асинхронного электродвигателя с короткозамкнутым ротором. Получим следующие характеристики двигателя (рис. 2.28):
Рис. 2.28. – характеристики двигателя Задание 7. Математические модели элементов систем Электропривода
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-14; просмотров: 446; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.007 с.) |

 , (2.6.27)
, (2.6.27) (с), (2.6.28)
(с), (2.6.28) (с), (2.6.29)
(с), (2.6.29) (рад/с).
(рад/с). (с),
(с),  ,
,
 Рис. 2.19. Модель системы ПЧ-АД для программного пакета MatLab
Рис. 2.19. Модель системы ПЧ-АД для программного пакета MatLab .
.


 шиеся значения: ω =52,36 рад/с; I 1 =10,29 А; M в =0,036 Нм.
шиеся значения: ω =52,36 рад/с; I 1 =10,29 А; M в =0,036 Нм.



 , получаем:
, получаем:  ном = 155,4 рад/с.
ном = 155,4 рад/с. об/мин.
об/мин. с-1.
с-1.