Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основні елементи регуляторів та вимоги до них.Содержание книги
Поиск на нашем сайте Первинний прилад признач для вимірювання регулювальної величини і перетворення її на вхідний сигнал регулятора. Вимоги до первинних перетворювачів:направленість дії(детектування) – зміна вихідного сигналу датчика не повинна впливати на вхідну величину; висока чутливість і мала інертність; лінійність статичної характеристики (залежність вихідного сигналу датчика від вхідного сигналу повинна бути близькою до лінійної в робочому діапазоні вимірювання регулювальної величини), не лінійність зменш точність і швидкодію регулятора; висока надійність. Відмова в роботі первинного приладу може призвести до відмови САР або до помилкових дій САР. Вимірювальний пристрій є сумуючою ланкою в колі ланок автоматичної системи. Тут здійснюється алгебраїчне додавання заданого і поточного значення регулювальної величини. На вхід вимір пристрою може подаватися к-ка різних сигналів. При цьому він має к-ка входів і один вихід. Вимоги до вимір пристроїв: можливість компенсації сигналів, що поступають від датчиків; лінійність і стабільність статичної характеристики, що зв’язує зміни вхідного і вихідного сигналу; можливість сумування вхідних сигналів. Задатчик ручного управління призначений для формування сигналу, що відповідає заданому значенню регулювальної величини. Вхід задатчика – це положення органу, що встановлює це значення, а вихід – це сигнал, що відповідає заданому значенню тієї ж форми, що і вихідний сигнал первинного приладу. Вимоги: висока стабільність вихідного сигналу; достатній діапазон зміни сигналу, що дозволяє компенсувати постійну складову регулювальної величини. Командно-підсилювальний пристрій призначений для перетворення вихідного сигналу вимірювального блоку і підсилення його до значення необхідного для керування виконавчим механізмом. Входом командно-підсилювального пристрою є вихідний сигнал вимірювального блоку. А виходом є сигнал, що керую виконавчим механізмом. Вимоги: направленість дії; достатньо високий і стабільний коеф підсилення; мала інерційність; лінійність статичної характеристики в широкому діапазоні зміни вхідного сигналу. 26. Призначення виконавчих пристроїв регуляторів та їх типи. Виконавчі пристрої регуляторів – це сервоприводи призначені для переміщення регулювального органу, з яким вони зв’язані за допомогою мех.. передач. Вик. пристрій розвиває зусилля, яке необхідне для переміщення регулювального органу за рахунок використання енергії, що підводиться до нього безпосередньо або через командно-підсилювальний пристрій. Сервопривід характеризується двома основними показниками: 1)зусилля що розвивається поршнем або обертовим моментом на вихідному валі. 2)максимальний хід поршня або кут повороту вихідного вала. Перехід з автоматичного управління на ручне здійснюється за доп перемикача управління. Залежно від виду джерела енергії виконавчі механізми поділяються на:1)електричні 2)гідравлічні 3)пневматичні. Кожен з цих механізмів поділяється за характером руху сервоприводів на 3 групи:1)сервоприводи з постійною шв. 2)з змінною шв. 3)з пропорційною шв. 1.Вихідний вал або поршень сервоприводу переміщується з постійною шв не залежно від значення сигналу регулятора. Р-ня руху Хр-переміщення вихідного вала або поршня, Тс - час необхідний для переміщення органу регулювання з одного крайнього положення в інше. Знак +/- залежить від напрямку руху. До сервоприводів з постійною шв відносять - ел. виконавчі механізми. Вони скл. Із електродвигуна зв’язаним з редуктором.. Включення двигуна і його вимкнення здійснюється магнітним пускачем. Ел. двигуни мають такі характеристики: - обертовий момент вала, - частота обертання ел.двигуна, - передаточне число, - кут повороту вихідного вала. Сервопривід із змінною шв. вихідний вал або поршень переміщується зі шв. пропорційною до значення сигналу керування.
Тс – час повного ходу сервоприводу. Сервопривід з пропорційною шв. Швидкість руху вала або поршня пропорційна швидкості зміни сигналу керування
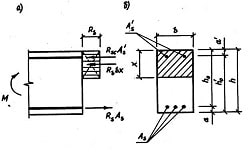
Загальним недоліком сервоприводі всіх типів є розгін і вибіг вихідного вала або поршня. Як видно з графіка руху поршня або вала на долю
|
||
|
|
Последнее изменение этой страницы: 2019-05-20; просмотров: 182; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.153 (0.006 с.) |

 .
. ,
,  .
.  .
. .
. припадає більше значення додатного переміщення Хр після зняття сигналу керування. Для усунення вибігу передбачено спеціально гальмівні пристрої. Вимоги до сервоприводів регуляторів: 1)запас потужності 2) мінімальний вибіг 3) відсутність мертвого ходу 4)регулювання ходу
припадає більше значення додатного переміщення Хр після зняття сигналу керування. Для усунення вибігу передбачено спеціально гальмівні пристрої. Вимоги до сервоприводів регуляторів: 1)запас потужності 2) мінімальний вибіг 3) відсутність мертвого ходу 4)регулювання ходу