
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Построение ЛЧХ в цифровых системахСодержание книги
Поиск на нашем сайте В общем случае ПФ разомкнутой цифровой системы имеет вид:
Для построения ЛЧХ используется W – преобразование и ЛЧХ строится в функции псевдочастоты. Для цифровых систем как и для импульсных для низких частот ПФ Покажем это на примере системы с ПФ:
и экстраполятором нулевого порядка. Примем, что все сопрягаемые частоты звеньев знаменателя меньше Разложим (1) на простые дроби:
где
С учетом ПФ
где Заменим
Так как было принято, что Откуда получим:
Сравнивая выражения (2.7.6) и (2.7.2) видим, что они совпадают в НЧ области, так как было принято Также, как и в импульсных системах может быть применен приближённый способ построения ЛЧХ. В области низких частот (
Последовательная коррекция с помощью аналоговых регуляторов В общем случае коррекция цифровых САУ может производиться за счет аналоговой (непрерывной) или цифровой части. Цели и задачи динамического синтеза цифровых САУ те же, что и непрерывных (устойчивость и качество управления). Рассмотрим синтез цифровых систем управления с помощью последовательного непрерывного корректирующего устройства. Цифровая часть отражена квантователем с периодом Т и частотой ω0=2π/Т и экстраполятором нулевого порядка. Квантователь символизирует то, что информация на выходе системы и в канале обратной связи имеет цифровой или импульсный характер вследствие применения цифровых преобразователей. Однако аналоговый регулятор может обрабатывать выходной сигнал квантователя только после декодирования и фиксации с помощью Э0.
Рисунок 2.11.1 – ЦСАУ
Поскольку регулятор расположен между Э0 и объектом управления, запишем импульсную ПФ разомкнутой системы в виде:
Целью синтеза является определение физически реализуемой передаточной функции Wку(S) аналогового регулятора, обеспечивающего требуемые показатели качества ЦСАУ.
|
||
|
|
Последнее изменение этой страницы: 2019-05-20; просмотров: 265; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.006 с.) |


 .
. практически совпадают с ПФ
практически совпадают с ПФ  исходной непрерывной части. В этой области
исходной непрерывной части. В этой области  .
. ,
,  (2.7.1)
(2.7.1) , или
, или  (
( ). То есть изломы асимптотической ЛАХ расположены в НЧ области
). То есть изломы асимптотической ЛАХ расположены в НЧ области  .
. , (2.7.2)
, (2.7.2) - коэффициенты разложения.
- коэффициенты разложения. (2.7.3)
(2.7.3) для дискретной ПФ:
для дискретной ПФ: , (2.7.4)
, (2.7.4) , (
, ( и перейдем к дискретной частотной ПФ заменой
и перейдем к дискретной частотной ПФ заменой 
 (2.7.5)
(2.7.5) .
. (2.7.6)
(2.7.6) , то влияние дополнительного множителя
, то влияние дополнительного множителя  можно не учитывать в НЧ области. Таким образом частотные характеристики непрерывной и цифровой системы совпадают в области НЧ. Этот же вывод непосредственно следует из теоремы Котельникова.
можно не учитывать в НЧ области. Таким образом частотные характеристики непрерывной и цифровой системы совпадают в области НЧ. Этот же вывод непосредственно следует из теоремы Котельникова. ) ЛАХ цифровой системы принимают равной ЛАХ непрерывной части, а высокочастотную область ЛАХ, лежащую за частотой
) ЛАХ цифровой системы принимают равной ЛАХ непрерывной части, а высокочастотную область ЛАХ, лежащую за частотой  , строят по методике построения ЛАХ импульсных систем.
, строят по методике построения ЛАХ импульсных систем.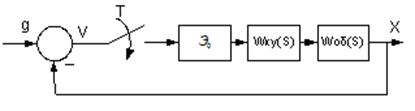
 . (2.11.1)
. (2.11.1) (2.11.2)
(2.11.2)


