Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Идеальное дифференцирующее звено.Содержание книги
Поиск на нашем сайте Запаздывающее звено. 3.И – регулятор. Идеальное дифференцирующее звено Уравнение звена Передаточная функция W(S)=КS Переходная функция h(t)=Кδ(t), где δ(t) – дельта функция.
Частотные характеристики КПФ звена W(jω)=jкω, т.е. АФЧХ звена совпадает с положительной мнимой осью. При ω=0 А(ω)=0, с увеличением частоты А(ω) увеличивается и при ω=∞ А(ω)=∞. Модуль КПФ А(ω)=ωК, аргумент КПФ φ(ω)=90°, т.е. с увеличением частоты амплитуда выходного сигнала увеличивается. Аргумент не зависит от частоты и равен 90°, т.е. идеальное дифференцирующее звено вносит опережение, равное 90°, на всех частотах.
Рисунок 11.4 АФЧХ звена Выражение для ЛАЧХ звена записывается в виде ЛФЧХ идеально дифференцирующего звена – прямая, параллельная оси абсцисс, проведенная на уровне 90° а) Рисунок 11.5 а) – ЛАЧХ звена, б) – ЛФЧХ звена Запаздывающее звено Уравнение звена y(t)=x(t)(t-τ); где τ – время чистого запаздывания. Запаздывающее звено передает сигнал без искажения, но с задержкой на время τ. Передаточная функция W(s)= е – S Переходная функция h(t)=1(t-τ), т.е. переходная характеристика представляет собой повторение входного сигнала (единичного скачка), но с задержкой на время τ. Импульсная переходная функция ω(t)=δ(t-τ). Частотные характеристики КПФ звена АФЧХ звена представляет собой окружность с центром в начале координат и радиусом равным единице. Модуль КПФ Аргумент КПФ φ(ω)=-ω*τ, т.е. с увеличением частоты и времени чистого запаздывание отставание выходного колебания по фазе увеличивается.
И – регуляторы И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения.
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора Билет №16-41 Статическое регулирование. Статические (пропорциональные) – это такое регулирование когда регулируемый параметр y(t) после п/х процесса принимает новое значение, отличное от первоначального. Остаточное отклонения E(t)= y – y0 регулируемого параметра называют статической ошибкой. При статических регулированиях каждому значению регулируемого параметра соответствует определенное положение регулирующего органа РО, т.е. относится к системе прямого действия. И – регуляторы И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения. Передаточная функция И – регулятора
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора
|
||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 377; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.153 (0.006 с.) |

 , т.е. выходной сигнал пропорционально скоростью изменение входного сигнала.
, т.е. выходной сигнал пропорционально скоростью изменение входного сигнала.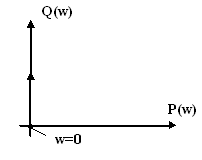
 . ЛАЧХ идеально дифференцирующего звена представляет собой прямую с наклоном 20 дб/дек, имеющую при ω=1 ординату, равную 20 lg к.
. ЛАЧХ идеально дифференцирующего звена представляет собой прямую с наклоном 20 дб/дек, имеющую при ω=1 ординату, равную 20 lg к.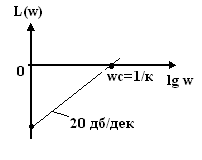 б)
б) 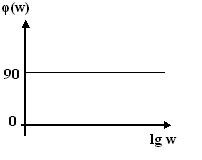

 .
.
 или
или  Передаточная функция И – регулятора
Передаточная функция И – регулятора (12.4)
(12.4) = 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования
= 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования . Чем больше
. Чем больше