Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Линейное программирование основывается на предположении о линейной зависимости некоторых ресурсов в процессе производства.Содержание книги
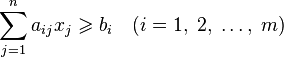
Поиск на нашем сайте Общей (стандартной) задачей линейного программирования называется задача нахождения минимума линейной целевой функции (линейной формы) вида[3]:
Задача, в которой фигурируют ограничения в форме неравенств, называется основной задачей линейного программирования (ОЗЛП)
Задача линейного программирования будет иметь канонический вид, если в основной задаче вместо первой системы неравенств имеет место система уравнений с ограничениями в форме равенства[4]:
Модель не полностью описывает объект вследствие: 1)ресурсы могут быть частично заменяемы 2)Затраты не строго пропорциональны, так как существуют постоянные затраты связанные с объемом производства. 3)Цена продукции может зависеть от объема реализации.
Однако данным методом можно решить ряд задач: 1)Транспортная задача 2)Задача о смесях. Приобретение на рынке некоторых смесей с целью получения нужного сосотава. 3)Создание запасов на складе 4)Задача об использовании производственных мощностей. Нелинейное программирование (NLP, англ. N on L inear P rogramming) — случай математического программирования, в котором целевой функцией или ограничением является нелинейная функция. Задача нелинейного программирования ставится как задача нахождения оптимума определённой целевой функции
где Решение задач НЛПР связано с трудностями: 1)Классические методы позволяют найти локальный экстремум, для нахождения глобального требуется доп исследование. 2)Наличие ограничений приводит к необходимости решения задачи и поиску локального экстремума. 3) В реальных задачах целевая функция и ограничения могут быть недифференцируемы.то есть требуются специальные методы решения. 4) НЛП используются гораздо реже, чем ЛП
Динамическое программирование применяется при решении задач оптимизации динамических систем, меняющихся в течении времени эволюции, широко применяются при решении задач управления запасами/календарного планирования.
ДП- это метод решения задач нелинейного программирования. При решении задачи этим методом процесс решения расчленяется на этапы, решаемые последовательно во времени и приводящие, в конечном счете, к искомому решению. Суть заключается в том, что создается такая вычислительная схема, когда предпочтительнее большое количество задач с малым числом переменных, а не одна задача с множеством переменных. Задачи динамического программирования предполагают наличие опр-х этапов при условии: оптимальные решения отдельных шагов создают общее оптимальное решение.
Требуется переместится из О в А: необходимо определить наиболее выгодную траекторию, предполагающую минимальную трату горючего. Число на осях определяет расход топлива в сек. Для многих случаев справедлива модель формулы
Особенности модели динамического программирования: 1)Задачи интерпретируются как пошаговый процесс управления 2)Целевая функция = сума целевых функций каждого шага 3)выбор управления на R-ом шаге зависит только от состояния системы к этому шагу и не влияет на предшествующие шаги. 4)Состояние Sr после R-го шага управления зависит только от предшествующего шага Sr-1 и управления Xr (Отсутствие последствия). 5) На каждом шаге управления Xr зависит от конкретного числа управляющих переменных, а Sr от конечного числа параметров.
Принцип оптимальности впервые был сформулирован Р. Беллманом в 1953 г. Каково бы ни было состояние s системы в результате какого-либо числа шагов, на ближайшем шаге нужно выбирать управление так, чтобы оно в совокупности с оптимальным управлением на всех последующих шагах приводило к оптимальному выигрышу на всех оставшихся шагах, включая данный. Беллманом четко были сформулированы и условия, при которых принцип верен. Основное требование — процесс управления должен быть без обратной связи, т.е. управление на данном шаге не должно оказывать влияния на предшествующие шаги.
|
||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 346; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.153 (0.007 с.) |


 ,
, .
. ,
, при выполнении условий
при выполнении условий
 — параметры,
— параметры,  — ограничения,
— ограничения,  — количество параметров,
— количество параметров,  — количество ограничений.
— количество ограничений.
 н/р: задача оптимального расхода топлива при наборе высоты
н/р: задача оптимального расхода топлива при наборе высоты