Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Последовательный порт обмена даннымиСодержание книги
Поиск на нашем сайте
Современные микроконтроллерные средства не могут проектироваться без учета одного из важнейших требований комплексной автоматизации – наличия необходимых аппаратных и программных интерфейсов для сопряжения с устройствами управления верхнего уровня – управляющими ЭВМ или промышленными программируемыми контроллерами. Для выполнения этих требований в МК имеются встроенные последовательные порты обмена данными.
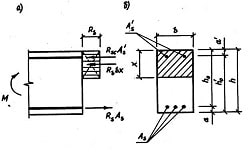
В состав последовательного порта (рис. 14) входит универсальный синхронно-асинхронный приемопередатчик, который может работать в нескольких режимах: одном синхронном и трех асинхронных в соответствии с установкой режима в регистре управления. Скорость приема или передачи данных устанавливается в регистре скорости обмена (4800, 9600, 19 200, 38 400, 57 600 бод). Максимальная скорость приемопередачи при тактовой частоте 20 МГц для асинхронного режима составляет 1,25 Мбит, а для синхронного – 3,33 Мбит. Состояние последовательного порта контролируется в соответствии с заданием в статусном регистре либо в режиме программного опроса, либо по прерываниям. В последнем режиме запрос на прерывание по приему генерируется автоматически, когда по последовательному каналу поступил байт данных и буфер данных содержит информацию, преобразованную из последовательного формата в параллельный. Запрос на прерывание по передаче генерируется, когда очередной байт данных передан и буфер передатчика пуст. Порт допускает работу в так называемом режиме Master-Slave (Ведущий-Ведомый), что позволяет включать МК в состав мультимикропроцессорной системы управления (рис. 15) с возможностью автоматической идентификации адреса одним из нескольких приемников. Это делается с помощью отдельного дополнительного бита, передача которого активизирует прием адреса одновременно всеми подключенными к порту приемниками. Тот приемник, который идентифицировал свой адрес, на
чинает работать в обычном режиме пакета данных, а все остальные отключаются. Если мультипроцессорная система выполнена не на одной печатной плате, а в виде отдельных устройств, то связь между удаленными устройствами должна осуществляться по одному из специально разработанных стандартных интерфейсов (RS-232, RS-422, RS-485) через микросхемы-драйверы. Для интегрированных иерархических систем автоматического управления исключительно важное значение имеет наличие нескольких (двух-трех) портов последовательного обмена. Тогда один порт обеспечивает обмен данными с системами верхнего уровня, а второй (третий) – с другими контроллерами в мультипроцессорной системе и с внешним пультом оперативного управления либо обеспечивает сбор данных с удаленных технологических датчиков невысокого быстродействия (температура, давление, расход и т. д.).
2.6 Встроенный контроллер прерываний
Построить эффективную систему управления в реальном времени можно только с использованием контроллера прерываний. Контроллер прерываний, получая запрос прерывания от внешнего сигнала, от одного из интегрированных в микроконтроллер периферийных устройств или по команде (программы), с учетом установленного приоритета прерываний вызывает соответствующую процедуру обслуживания прерывания. При этом содержимое счетчика команд сохраняется в стеке, после чего в счетчик команд загружается вектор перехода на процедуру обслуживания прерывания. После того как обслуживание прерывания завершится, следует автоматический возврат к задаче, которая была прервана. Так организуется обработка внутренних и внешних событий в реальном времени с подключением соответствующих подпрограмм к общему потоку управляющей программы – к фоновой программе. В случае возникновения нескольких запросов на прерывания обслуживаться будет тот запрос, который обладает высшим приоритетом, затем следующий по уровню и самой последней будет выполняться основная программа – фоновая задача. Встроенный контроллер прерываний с установленными приоритетами используется для эффективного управления внешними событиями в реальном времени с минимальными затратами ресурсов процессора на идентификацию событий и анализ состояний входов.
|
||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 305; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.64 (0.006 с.) |