Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Переход от стандартной и общей форм ЗЛП к каноническойСодержание книги Поиск на нашем сайте Разнообразие форм задач линейного программирования затрудняет исследование их общих особенностей и создание общих методов и вычислительных алгоритмов для их решения. Рассмотрим способ сведения любой ЗЛП к наиболее простой и удобной для исследования форме — канонической. Для осуществления перехода от стандартной формы записи к канонической нужно в каждое из m неравенств системы ограничений ввести m дополнительных неотрицательных переменных: xn+1, xn+2,…, xn+m, тогда система ограничений примет вид:
a21x1+a22x2+ + a2nxn + xn+2 = b2 (1.5.14) а31х1+а32х2+... + азnхn + xn+3 = b3 ………………………………………… am1х1+аm2х2+... + аmnхn+ xn+m = bm здесь xn+1, xn+2, xn+3, …, xn+m— выравнивающие балансовые переменные, где xj ≥0, где (j = l,...,n+m). Добавив эти балансовые переменные в неравенства, превращаем их в уравнения. Если же в стандартной форме требовалось минимизировать целевую функцию, то, заменив ее знак на «-», получим: F1 = F = -c1 х1 - c2 х2 - c3 х3 -…..- cn хn → max (1.5.15) Для решения этой задачи необходимо найти такой вектор Х=(x1, x2, x3, …, xm), который удовлетворял бы системе ограничений (1.5.14) и при котором целевая функция (1.5.15) принимала бы максимальное значение. Пример Пусть ЗЛП задана в стандартной форме: F = 2х1 + Зх2 → max при ограничениях:
2x1+x2≤16 х2≤5 Зх1 ≤21 x1≥0; х2≥0. Приведем эту задачу к каноническому виду. x1 +3х2 + х3 =18 2х1 +х2 + х4 =16 х2 + х5 =5 Зх1+ х6 =21. В данном примере все дополнительные переменные введены со знаком «+», так как рассматриваемые неравенства имеют знак ≤. Необходимо заметить, что в том случае, если неравенства имели бы знак ≥, переменные нужно было бы вводить со знаком «-». Графический метод решения ЗЛП Графический метод решения ЗЛП имеет ограниченную область применения. Как правило, этим методом решаются задачи, содержащие не более двух переменных. Пример Найти решение X*=(x*1,x*2), которое удовлетворяет системе неравенств:
a21x1+a22x2 ≤ b2 (1.6.1) а31х1+а32х2 ≤ b3 ………………………………………… am1х1+аm2х2 ≤ bm условиям неотрицательности переменных: х 1 ≥ 0, х 2 ≥ 0 (1.6.2) и которое доставляет оптимальное значение целевой функции: F = c1x1+c2x2 —>max(min). (1.6.3) Применение геометрического метода предполагает использование нескольких этапов. На первом из них в системе координат X1OX2 строится область допустимых решений задачи (ОДЗ). Для этого ка Каждая из этих прямых делит плоскость Х1ОХ2 на две полуплоскости (рис. 1.6.1). Для точки (*) А, принадлежащей одной из этих полуплоскостей, выполняется неравенство: ailx1+ai2x2 < bi (i=l,…, m). для любой (*)В, принадлежащей другой полуплоскости, — противоположное: ailx1+ai2x2 > bi (i=l...m), а для любой из точек, лежащих на граничной прямой, — уравнение: ailx1+ai2x2 = bi (i=l...m).
Рис. 1.6.1. Построение ОДЗ Чтобы графически определить, по какую сторону от граничной прямой располагается полуплоскость, содержащая решения, удовлетворяющие рассматриваемому неравенству, достаточно испытать одну какую-либо точку, например точку с координатами (0,0). Если при подстановке ее координат в левую часть неравенства оно удовлетворяется, значит, искомая полуплоскость содержит данную точку и штриховка, выделяющая искомую полуплоскость, обращена в сторону к испытуемой точке. Если же неравенство не удовлетворяется, штриховка, выделяющая искомую полуплоскость, обращена в противоположную от данной точки сторону. Неравенства x1≥0 и х2≥0 также соответствуют полуплоскостям, одна из которых расположена справа от оси ординат, а другая - над осью абсцисс (рис. 1.6.1). Выделив полуплоскости, содержащие решения, удовлетворяющие неравенствам, входящим в рассматриваемую систему, мы определим область, в которой находятся решения, удовлетворяющие всем ограничениям, входящим в рассматриваемую систему неравенств. Именно эта область и есть область допустимых решений задачи. Пример. Необходимо построить область допустимых решений, удовлетворяющую системе неравенств: x1+х2≤ 1 x1-x2≤ -1 х 1 ≥ 0, х 2 ≥ 0 Для этого первое из неравенств обратим в равенство (x1+х2= 1) и построим соответствующую ему граничную прямую. Эта прямая проходит через две точки, координаты которых можно определить следующим образом. Положим, x1=0, тогда получим 0+х2= 1, т. е., х2= 1,а если х2=0, тогда x1+0= 1, т. е.,x1=l, следовательно, граничная прямая на рис. 1.6.2 проходит через точки с координатами (0,1) и (1,0). Чтобы определить; в какой полуплоскости находят решения, удовлетворяющие первому неравенству, подставим точку с координатами (0,0) в первое неравенство 0+0≤ 1 и убедимся, что точка (0,0) ему удовлетворяет. Следовательно, все решения, удовлетворяющие данному неравенству, находятся в той же полуплоскости, что и точка 0, значит, штриховка, выделяющая полуплоскость, содержащую решения, удовлетворяющие первому неравенству, обращена к точке 0. Затем определим полуплоскость, в которой находятся решения, удовлетворяющие второму неравенству. Для этого второе из неравенств обратим в равенство и построим соответствующую этому равенству граничную прямую. С помощью приема, описанного выше, определим точки, через которые проходит граничная прямая; этими точками будут: (x1=0, х2=1) и (x2=0, x1=-l).
Выделим полуплоскости, соответствующие неравенствам: x1 ≥ 0 и х2 ≥ 0. Полуплоскость справа от оси ординат будет соответствовать неравенству x1 ≥ 0, а полуплоскость над осью абсцисс — неравенству х2 ≥ 0. В рассматриваемом примере область допустимых решений состоит из одной точки с координатами (0,1). Рис. 1.6.2. ОДЗ —одна точка В общем случае область допустимых решений систем неравенств (1.6.1) и (1.6.2) может быть: 1. пустой, что означает несовместимость систем неравенств:
x1-x2≤4 x1≥0; x2≥0
Рис. 1.6.3. ОДЗ —пуста
x1+x2 ≤l x1-x2 ≤-1 x1 ≥0; x2 ≥0
Рис. 1.6.4. ОДЗ — одна точка
2x1+x2 ≥2 x1+3х2 ≥3 x1-x2 ≥-1 Зх1-х2 ≤ 6 x1+x2 ≤ 5 x1≥0;х2≥0 Рис. 1.6.5. ОДЗ — выпуклый многоугольник
Зх1-2х2 ≥-15 4х1-х2 ≥20 Зх1+х2 ≥30 x1-2х2 ≤20 х1 ≥0;х2 ≥0 Рис. 1.6.6. ОДЗ — неограниченная выпуклая многоугольная область
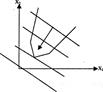
Уравнение: c1x1+c2x2 =L при фиксированном значении L определяет прямую, а при изменении L — семейство параллельных прямых с параметром L. Вектор С=(с1,с2), перпендикулярный всем этим прямым, показывает направление возрастания параметра L. Так, на рис. 1.6.7. показаны прямые, соответствующие уравнению 2x1+3x2=L при L= -3, 0, 3, 9.
Рис. 1.6.7. Графическое изображение целевой функции
Рис. 1.6.8. Определение оптимального решения графическим методом Построив на одном рисунке (рис. 1.6.8) область допустимых решений, вектор С, и перпендикулярную ему одну из линий уровня, можно путем ее параллельного перемещения в направлении, указанном вектором С (или в противоположном), определить точку в области допустимых значений, которая доставляет максимум или минимум целевой функции. На рис. 1.6.8 видно, что в крайнем положении линия уровня проходит через (*)В. При дальнейшем ее перемещении она уже не будет иметь общих точек с областью допустимых решений. Таким образом, искомое оптимальное решение, которое графически соответствует координатам (*)В, можно найти путем совместного решения системы двух уравнений, соответствующих граничным прямым АВ и ВД. Если при тех же исходных данных требовалось бы достичь минимума функции F, то, очевидно, линию уровня пришлось бы перемещать в направлении, противоположном вектору С. В этом случае оптимальное решение, соответствующее минимуму функции F, определялось бы координатами точки (*)0. В зависимости от вида области допустимых решений и положения линий уровня возможны следующие случаи:
ЗЛП имеет единственное решение 1.6.10. ЗЛП имеет альтернат. оптимум (А и В)
|
||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 339; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.192 (0.01 с.) |

 allx1+a12x2+... + a1nxn+ xn+1 = b1
allx1+a12x2+... + a1nxn+ xn+1 = b1 х1+Зх2≤18
х1+Зх2≤18 Обратим имеющуюся систему неравенств в равенства, вводя для этого в каждое из них соответствующую неотрицательную переменную:
Обратим имеющуюся систему неравенств в равенства, вводя для этого в каждое из них соответствующую неотрицательную переменную: allx1+a12x2 ≤ b1
allx1+a12x2 ≤ b1 ждое из неравенств системы (1.6.1) заменяем равенством и строим соответствующие этим равенствам граничные прямые: ailx1+ai2x2 = bi (i=l,…, m).
ждое из неравенств системы (1.6.1) заменяем равенством и строим соответствующие этим равенствам граничные прямые: ailx1+ai2x2 = bi (i=l,…, m).
 Испытав точку 0, увидим, что штриховка, выделяющая полуплоскость, содержащую решения, удовлетворяющие первому неравенству, обращена в сторону, противоположную от 0.
Испытав точку 0, увидим, что штриховка, выделяющая полуплоскость, содержащую решения, удовлетворяющие первому неравенству, обращена в сторону, противоположную от 0. x1+x2≤3
x1+x2≤3 2. одной точкой:
2. одной точкой: 3. выпуклым многоугольником:
3. выпуклым многоугольником: 4. неограниченной выпуклой многоугольной областью:
4. неограниченной выпуклой многоугольной областью: На втором этапе формируется графическое изображение целевой функции.
На втором этапе формируется графическое изображение целевой функции. Для всех точек, лежащих на одной из этих прямых, функция F принимает одно определенное значение, равное соответствующему значению L. Поэтому рассматриваемые прямые называются линиями уровня для параметра L. Важное свойство линии уровня в том, что при их параллельном смещении в одном направлении уровень (значение L) только возрастает, а при смещении в другом — только убывает.Построим для рассмотренного примера линии уровня и определим направление их возрастания. Чтобы построить вектор C=(c1, с2), можно использовать следующий прием: по оси X1 откладывается значение первой компоненты вектора C1=2, а по оси Х2 — значение второй компоненты С2=3. По найденным координатам строим прямоугольник и находим направление возрастания вектора С. Затем перпендикулярно вектору С строим линии уровня.
Для всех точек, лежащих на одной из этих прямых, функция F принимает одно определенное значение, равное соответствующему значению L. Поэтому рассматриваемые прямые называются линиями уровня для параметра L. Важное свойство линии уровня в том, что при их параллельном смещении в одном направлении уровень (значение L) только возрастает, а при смещении в другом — только убывает.Построим для рассмотренного примера линии уровня и определим направление их возрастания. Чтобы построить вектор C=(c1, с2), можно использовать следующий прием: по оси X1 откладывается значение первой компоненты вектора C1=2, а по оси Х2 — значение второй компоненты С2=3. По найденным координатам строим прямоугольник и находим направление возрастания вектора С. Затем перпендикулярно вектору С строим линии уровня.