Вибір оптимальної потужності джерел розосередженої генерації при мінімумі втрат потужності в мережі
Поставлену задачу розглянуто для двох видів схем з різними вихідними даними.
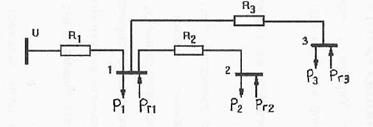
Схема 1. В існуючій схемі електропостачання (рисунок 4.4) треба розподілити між вузлами 1, 2 та 3 сумарну потужність джерел розосередженої генерації, рівну в 600 кВт. Критерій оптимальності – мінімум втрат активної потужності.
Вихідні дані:
напруга схеми U=10 кВ;
опори ліній  , ,  , ,  Ом; Ом;
активні навантаження вузлів  , ,  , ,  кВт. кВт.
Рисунок 4.4 Схема електропостачання
Розв’язок:
Відповідно до вихідних даних втрати активної потужності, що підлягають мінімізації визначаються співвідношенням

де  ; ;
 ; ;
 . .
Сумарна потужність джерел розосередженої генерації обмежується умовою
 . .
У відповідності з рівнянням функція Лагранжа матиме вигляд:

Для визначення мінімуму функції Лагранжа розрахуємо її часткові похідні по всім змінним та прирівняємо ці похідні до нуля:
 , ,
 , ,
 , ,
 . (4.25) . (4.25)
Отримана система лінійних рівнянь легко вирішується. З 1-го рівняння системи (4.25) визначаємо величину множника Лагранжа:
 . (4.26) . (4.26)
Після підстановки  в 2-ге рівняння системи, будемо мати: в 2-ге рівняння системи, будемо мати:
 , (4.27) , (4.27)
Звідки  кВт. кВт.
Після підстановки в 3-ге рівняння системи, будемо мати:
 , ,
Звідки  кВт. кВт.
З останнього рівняння системи (4.25)
 кВт кВт
І, нарешті, з першого рівняння системи (4.25) знайдемо величину множника Лагранжа:
 . .
У відповідності з виразом цільової функції мінімальні втрати активної потужності в схемі електропостачання при обмеженні сумарної потужності джерел розосередженої генерації величиною  кВт складуть: кВт складуть:

Схема 2. Для схеми, що приведена на рисунку 4.5, визначити потужність джерел розосередженої генерації P2 та P3, що мінімізують втрати потужності в мережі. Необхідні розрахункові параметри вказані на рисунку 4.5.
Рисунок 4.5 Розрахункова схема
Для даної задачі запишемо цільову функцію:

Для вирішення даної задачі скористалися методом покоординатного спуску з оптимізацією кроку.
Продиференціюємо по P2 цільову функцію:

Після перетворень отримаємо:


Аналогічно знаходимо  та після перетворень отримаємо: та після перетворень отримаємо:

Таким чином, отримуємо систему рівнянь:

(4.28)
Далі:
1) Обирається в якості початкового наближення точка на початку координат х0(0,0): P2 = 0; P3 = 0.
2) Визначається перший оптимальний крок, змінюючи координату P2 при незмінній координаті P3 = 0. Для цього в перше рівняння системи (4.28) підставляємо значення координати P3 = 0. Отримаємо P2 = 26,5; P3 = 0.
3) Розв’язуємо систему відносно P3 при P2 = 26,5 = const. Для цього в друге рівняння системи (4.28) підставляємо значення P2 = 26,5. Отримаємо, P3 = 8,6, тобто попадаємо у точку з координатами P3 = 8,6; P2 = 26,5.
Повторюючи обчислення по даній схемі, отримуємо точки:
Х3 (23,9;8,6),
Х4 (23,9;9,1),
Х5 (23,8;9,1).
Ознакою зупинки повинна стати наперед задана точність розрахунку ε.
Оптимізація кроку дозволяє досягти шуканої точки значно швидше.
|