Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Опис пристрою та його електроприводуСодержание книги
Поиск на нашем сайте Механізми різних пристроїв і систем неруйнівного контролю структурно можна зобразити у вигляді схеми
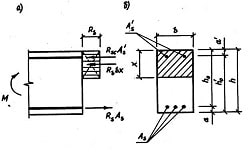
Де Д - двигун, М-муфта, ПМ - передаточний механізм, ВМ – виконавчий механізм. Програмний механізм призначений для комутації електроланцюгів перемикання ультразвукових датчиків, наприклад для контролю товщини прокатного металу, чи стану якості його поверхні та ін. Пристрій складається з програмного механізму, ультразвукових датчиків, та системи аналізу інформації. Загалом автоматичний пристрій контролю здійснює якісну та кількісну перевірку заданих параметрів через певні проміжки часу, в залежності від запрограмованості пристрою. Сам же механізм (Рис.1) складається з електроприводу 1, який зображений умовно, і командного апарату, що складається з певної кількості профільованих кулачків 2 і перемикачів 3. Пристрій розташовується згідно правил монтажу неподалік контрольованого металопрокату. Електропривод складається з двигуна, муфти та передавального механізму складеного з певних типів передавальних елементів. Кулачки профілюються згідно заданої циклограми(Рис 2).
Рис.1
Рис2. Кінематичний та силовий розрахунок пристрою А) Підбір двигуна Загалом існує велика кількість двигунів. В засобах неруйнівного контролю використовують стандартні двигуни змінного та постійного струму різної потужності, а також п’єзо та крокові двигуни які дозволяють отримати дискретний рух. Перевагою таких двигунів є велика точність передачі руху. Загалом двигуни обирають за найрізноманітнішими критеріями та вимогами, а також експлуатаційними характеристиками, наприклад вологість, запиленість і т.д. Потужність двигуна визначають через спільний ККД всього механізму, та потужності яку маємо отримати робочому органі.
hм – ККД муфти (приймаємо hм = 1) hпм - ККД передавального механізму: hпм = h1 ·h2 ·... hn; тут h1, h2...hn – ККД окремих передач передаточного механізму, hкм - ККД кулачкового механізму ККД для однієї циліндричної передачі знаходимо із табл.1
ККД кулачкового механізму =0.85 ККД муфти приймаємо рівним 1, Тоді Обчислимо необхідну потужність пристрою
Потужність двигуна розраховуємо за формулою:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 139; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.60 (0.005 с.) |




 , де
, де 


 Вт
Вт