Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сэв - совет экономической взаимопомощи- организация, объединяющая ряд социалистических стран, действовавшая с 1949 по 1991 годыСодержание книги
Поиск на нашем сайте Самая известная серия: 4А (разработана в 1969-1972). Мощность: от 60 Вт до 400 кВт. Отметим, что в пределах серии значение мощностей двигателей выбирается с учетом ряда предпочтительных чисел. Наиболее распространены ряды R5, R10, R20, R40. В пределах ряда Rn каждое следующее число равно предыдущему, умноженному на Номинальное напряжение: 220В, 380В, для больших мощностей также и 660 В. Напоминаю, что в качестве числового значения указывается действующее значение линейного напряжения. В качестве номинального напряжения для АД может быть указано 220/380 и 380/660. Это означает, что двигатель может работать на одну и ту же нагрузку от источников питания с двумя уровнями напряжения переменного тока. При меньшем уровне его обмотки должны быть соединены по схеме треугольник, при большем уровне – по схеме звезда. В целях экономии меди, электродвигатели мощностью 250 кВт и выше выполнялись на напряжение 6 (10) кВ [11]. Частота напряжения питания: 50 Гц. Отдельная модификация – 60 Гц. Синхронная частота вращения: 500, 600, 750, 1000, 1500 и 3000 об/мин. Габаритные размеры: Диаметр: в зависимости от мощности - 17 высот вращения от 50 до 355 мм. Длина: в рамках каждой высоты вращения двигатели могут быть выполнены на различную длину. Исполнения по длине корпусов обозначаются S (small/малые), M (medium/средние), L (large/большие). Исполнение: два варианта АД основного исполнения, отличающиеся системой охлаждения и степенью защиты от влияния окружающей среды. 1) Закрытое исполнение. Отсутствуют вентиляционные окна. Охлаждение осуществляется за счет наружного обдува при помощи внешнего вентилятора, который расположен на валу двигателя и прогоняет воздух между кожухом и корпусом (IP44). Защищен от брызг любого направления и от мелких деталей и инструментов (1мм). 2) Защищенное исполнение. В обозначении буква Н (для закрытых АД дополнительной буквы не предусматривается). От капель, падающих под углом 60 градусов к вертикали, и от соприкосновения персонала с токоведущими частями (IP23). Вентиляционные окна располагаются в нижней части двигателя. На роторе располагаются лопатки, которые, вращаясь, всасывают воздух через торцевые окна и выталкивают его в боковые окна. Показатели надежности: средний срок службы – не менее 15 лет при наработке 40000 ч; средний срок службы до первого капитального ремонта – 8 лет при наработке 20000 ч, вероятность безотказной работы – не менее 0,9 за 10000 ч. Исполнения АД Исходя из области применения АД делятся на: 1) АД общего назначения (условия эксплуатации – обычные, специальные требования к показателям двигателя – отсутствуют). В этом случае используют основное исполнение АД. 2) АД специального назначения (требования к тем или иным показателям АД – повышенные). В этом случае используют модификации АД, также входящие в состав серии. Модификации АД [17]. АД с повышенным пусковым моментом (4АР). Используются для приводов механизмов, имеющих большие статические и инерционные нагрузки при пуске. Для повышения пускового момента конструкция ротора у таких двигателей выполняется с двойной короткозамкнутой клеткой. АД с повышенным скольжением (4АС). Используются для приводов механизмов с пульсирующей нагрузкой, а также механизмов, работающих в повторно-кратковременном режиме S3 (большая частота пусков и реверса). Это достигается изготовлением обмотки ротора из материала с повышенным удельным сопротивлением. Многоскоростные АД с переключением числа пар полюсов. Используются для приводов, требующих ступенчатого регулирования частоты вращения. Эти двигатели отличаются от обычных исполнением обмотки статора. Выпускаются двух-, трех- и четырехскоростные АД. АД серии 4А с фазным ротором (4АК при IP44, 4АНК при IP23). Применяются для привода механизмов, требующих плавного регулирования частоты вращения, а также для работы в тяжелых условиях пуска. Малошумные АД. Двигатели предназначены для работы в приводах с повышенными требованиями к уровню шума. От основного исполнения АД отличаются более точной обработкой посадочных мест, улучшенной балансировкой, подшипниками более высокого класса по точности и по виброшумовым характеристикам, конструкцией вентиляционного узла. Двигатели обозначаются дополнительной буквой Н после обозначения числа полюсов, например 4A132S4HY3. Другие исполнения согласно ГОСТ-27471-87: Асинхронная двигатель двойного питания Асинхронный глубокопазный двигатель Вращающийся многоскоростной асинхронный двигатель Асинхронный двигатель с двойной беличьей клеткой Асинхронный двигатель с массивным ротором Асинхронный двигатель с полым ротором Асинхронный двигатель с расщепленной фазой Однофазный асинхронный двигатель с пусковым сопротивлением Конденсаторный асинхронный двигатель При специфических условиях эксплуатации используют специализированные исполнения АД - тропическое исполнение (в обозначении – после числа полюсов – Т); - химически стойкое исполнение; - влагоморозостойкое исполнение; - пылезащитное исполнение и т.д. Отличаются друг от друга применением соответствующей изоляции, типом обмоточных проводов, антикоррозионным покрытием деталей и узлов, наличием и типом уплотнений по линии вала. Ряд отдельных исполнений обусловлен областью применения АД: - лифтовые АД; - частотно-регулируемые АД для станков; - АД сельскохозяйственного назначения (обозначение – СХ; имеют повышенный пусковой момент, что обеспечивает их запуск и устойчивую работу при пониженном напряжении); - АД для рудничных работ; - АД для привода деревообрабатывающих станков; - АД для текстильной промышленности (Т). Другие серии 1) Серия 4АМ - модернизация серии 4А. - снижен уровень шума на 5 дБ; - повышены значения некоторых основных параметров; - уменьшена масса АД [17]. 2) Серия АИ – вариант серии 4А, унифицированный для стран, входящих в состав организации Интерэлектро (входили страны – бывшие члены СЭВ). Особенности: - шкала мощностей из 34 ступеней от 2,5 Вт до 400 кВт; - 18 габаритов с высотой осей вращения от 45 до 355 мм; - улучшенные энергетические показатели и пусковые характеристики; - повышенная надежность; - улучшенные виброакустические показатели (уровень шума снижен на 10-15 дБ); - уменьшены расходы активных материалов, в частности, меди на 2,5% и электротехнической стали на 4% [17]. 3) Серии 5А и 6А – разработаны на базе серии АИ. Эти типы двигателей начали выпускать с конца 90-х годов на российских машиностроительных заводах – Владимирский моторный завод и Ярославский машиностроительный завод (ОАО "Eldin"). Особенности: - наличие встроенного термодатчика в лобную часть; - использование современных электроизоляционных материалов; - степень защиты IP55 (для 6А). 4) Серии АТД4 и А4 (не путать с 4А). Высоковольтные АД с напряжениями питания: 6000В (минимальная мощность 200 кВт) и 10000В (минимальная мощность 630 кВт) [2].
14.1.4. Основные направления совершенствования АД [8]: 1) повышение энергоэффективности (КПД и cosj); 2) снижение уровня шума; 3) универсализация; 4) повышение надежности и долговечности; 5) повышение удобства монтажа и эксплуатации.
ГОСТом установлены нормы на КПД АД (ГОСТ 51677-2000) [8]: - нормальный: 76,2% для Р =1,1 кВт и 93,9% для Р =90 кВт; - повышенный: 82,8% для Р =1,1кВт и 95% для Р =90 кВт.
Уровень шума АД характеризуется значениями звуковой мощности и звукового давления, выраженными в децибелах. Достигнуты следующие показатели [8]: - двухполюсные: h =90 мм – 61 дБ, h =350 мм – 82 дБ; - четырехполюсные: h =90 мм – 50 дБ, h =350 мм – 75 дБ. Можно считать машины бесшумными, если Г<35 дБ; малошумными, если 35<Г<55 дБ; у нормальных микромашин 60<Г<80 дБ.
Универсализация может быть достигнута [8]: - высокой степенью защиты (не ниже IP55), что позволяет использовать их в средах с высоким содержанием пыли и влаги, а также на открытом воздухе; - пусковыми характеристиками, соответствующими требованиям МЭК; - обеспечением длительной работы АД при колебаниях напряжения в сети ±10%; - наличием сервис-фактора, что позволяет использовать АД при температуре окружающей среды до 50°С без снижения мощности.
Надежность и долговечность [8]: Обмотка АД. Обеспечивается температурными запасами – применением класса нагревостойкости F (155°С) при фактических температурах, соответствующих классу В (130°С), что повышает ресурс как минимум вдвое. Подшипники. Правильный выбор и высокое качество обработки посадочных мест, качественная сборка.
В последние 10-20 лет многие фирмы в Америке и Европе предпринимают попытки разработки и выпуска на широкий рынок так называемых энергоэффективных АД, в которых за счет увеличения на 30% массы активных материалов, удается на 1÷5% повысить номинальный КПД при соответствующем увеличении стоимости. В последние годы в Великобритании осуществлен крупный проект создания энергоэффективных двигателей без увеличения стоимости [40].
До этого речь шла о трехфазных АД. Другие исполнения АД.
Двухфазные АД Асинхронный двухфазный электродвигатель имеет на статоре две обмотки, оси которых сдвинуты в пространстве на 90 мех. градусов. На эти обмотки подается напряжение, сдвинутого по фазе на 90 эл. градусов. Применяются в следящих приводах в качестве исполнительных двигателей. Особенности двухфазных АД связаны с требованиями, предъявляемыми к исполнительным двигателям: 1) Линейность механических характеристик и устойчивая работа в широком диапазоне изменения скоростей вращения. Для выполнения этих условий двухфазные исполнительные АД выполняются с повышенным критическим скольжением, что обеспечивается повышенным сопротивлением ротора. 2) Высокое быстродействие. Для выполнения этого требования ротор в ряде конструкций АД выполняется тонкостенным (имеющим малый момент инерции).
Однофазные АД Применяются в бытовой технике (поскольку в бытовых условиях в наличии имеется только однофазная сеть). Достоинства: Общие для всех асинхронных двигателей: простота конструкции, бесконтактность и, как следствие, высокий ресурс и нетребовательность к обслуживанию. Недостатки: а) Нулевой пусковой момент (для пуска таких АД применяют дополнительные пусковые элементы – пусковые обмотки). б) Невозможность получения частоты вращения выше 3000 об/мин при частоте напряжения питании 50 Гц без использования преобразователя частоты в) Худшие удельно-массовые показатели по сравнению с трехфазными АД: мощность однофазного АД составляет не более 70% от мощности трехфазного АД в том же габарите. г) Однофазные АД имеют более низкую перегрузочную способность по сравнению с трехфазными АД. д) Низкий КПД.
Варианты пуска однофазных АД а) с помощью пусковой обмотки повышенного сопротивления, отключаемой сразу после разгона ротора; б) с помощью конденсатора (отключаемого после пуска или, у конденсаторных АД, включенного все время работы). Время подключения пусковой обмотки к сети обычно не превышает 5 сек. Двигатели с пусковой обмоткой повышенного сопротивления просты по конструкции и дешевы, не имеют дополнительного фазосдвигающего элемента. Двигатели имеют достаточно хорошие пусковые характеристики (кратность начального пускового момента — до 1,5), однако кратность пускового тока достигает 10 и более. К недостаткам двигателей данного типа следует отнести пониженную надежность по сравнению с конденсаторными двигателями из-за возможного выхода из строя пусковой обмотки. Для улучшения пусковых характеристик последовательно с пусковой обмоткой включается пусковой конденсатор, наличие которого приводит к увеличению сдвига фаз и пускового крутящего момента. После пуска конденсатор отключается, поэтому все остальные характеристики двигателя сохраняются такими же, как и у двигателя с пусковой обмоткой повышенного сопротивления.
Синхронные двигатели Не путать с вентильными двигателями на базе синхронных машин. У СД частота вращения ротора определяется частотой вращения магнитного поля статора (частотой напряжения статора): n =60 f / p. У ВД наоборот: частота вращения магнитного поля статора (частота напряжения) определяется частотой вращения ротора f = pn /60. Синхронные двигатели (как и вентильные двигатели) почти всегда (исключение – микродвигатели) работают при многофазном питании обмоток статора, создающих вращающееся магнитное поле.
Достоинства 1) Стабильность частоты вращения в синхронном режиме (частота вращения не зависит от момента нагрузки). 2) Коэффициент полезного действия синхронных двигателей на 1—2 % выше, чем асинхронных [4]. 3) Возможность реализации большего воздушного зазора. В АД зазор должен быть малым, поскольку от этого существенно зависит реактивная составляющая тока статора. Вследствие большей величины воздушного зазора добавочные потери в стали и в клетке ротора синхронных двигателей меньше, чем у асинхронных [9], выше надежность [53], так как меньше вероятность задевания ротора о статор при нестандартных ситуациях. 4) Синхронные двигатели могут работать, не обмениваясь с сетью реактивной мощностью (т.е. с коэффициентом мощности, равным 1). Если необходима выработка реактивной энергии для сети, то СД в режиме перевозбуждения могут отдавать реактивную мощность в сеть (работать при опережающем токе). Для синхронных компенсаторов это единственная функция. В результате улучшается коэффициент мощности сети, уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях [9]. Синхронные двигатели с cosφн = 1 по своей стоимости и потерям энергии всегда имеют преимущество перед асинхронными двигателями, снабженными конденсаторными батареями для компенсации коэффициента мощности до cosφ = 1 [9]. 5) СД менее чувствительны к колебаниям напряжения сети. Это обусловлено тем, что максимальный момент синхронного двигателя пропорционален U, a у асинхронного двигателя U 2. 6) Б о льшая перегрузочная способность М макс/ М ном по сравнению с АД. Отметим, что ее можно еще более увеличить за счет повышения тока возбуждения (например, при кратковременном повышении нагрузки). Дополнительно выделим достоинства и недостатки СД с постоянными магнитами. 1) Сравнительно высокие энергетические показатели (отсутствие потерь в ОВ) [5]. 2) Большая удельная мощность на единицу массы [5].
Недостатки 1) Конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей [9]. 2) Синхронные двигатели с электромагнитным возбуждением должны иметь источник для питания обмотки возбуждения постоянным током: возбудитель (электромашинный или тиристорный) или иное устройство [9]. 3) Синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором [9]. 4) Главный недостаток - сложность пуска. В отсутствие вращения средний момент на валу синхронного двигателя равен нулю. Электромагнитный момент, создающийся от взаимодействия вращающегося магнитного поля статора и магнитного потока неподвижной ОВ или магнита, меняет свое направление два раза за период переменного тока. Во время положительного полупериода вращающего момента ротор из-за своей инерционности не успевает тронуться с места и поспеть за вращающимся магнитным полем статора, и попадает под действие тормозного полупериода момента, направленного в противоположную сторону. Чтобы электродвигатель запустился, нужно довести его до частоты вращения, близкой к синхронной, то есть нужно раскрутить ротор в сторону вращения магнитного поля, создаваемого статором [5].
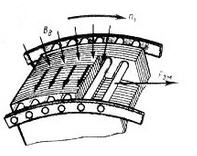
Способы пуска СД 1) При помощи вспомогательного двигателя, который также называют разгонным, или пусковым. В качестве него может использоваться, например, АД. Пусковой АД выбирается с числом полюсов на два меньшим, чем число полюсов запускаемого СД. Мощность разгонного АД составляет 5-15% [19]. Недостатки: громоздко, неэкономично, пускать можно СД только при малой нагрузке [19]. Данный способ в настоящее время практически не используется. 2) Асинхронный пуск синхронного двигателя (наиболее распространен). Для его реализации следует предпринять три действия: а) на роторе размещается дополнительная короткозамкнутая обмотка. Она может быть уложена в пазах или в специальных отверстиях полюсных наконечников (рис.14.4). Ее роль могут выполнять сами массивные полюсные наконечники. Для этого на торцах они соединяются пластинами [19].
Рис.14.4. Короткозамкнутая обмотка СД для асинхронного пуска [45]
б) ОВ отключается от источника питания (чтобы она не создавала магнитный поток). Потому что этот магнитный поток, взаимодействуя с вращающимся магнитным полем статора, создает при пуске тормозной момент, препятствующий вращению ротора. в) ОВ замыкается на сопротивление: R п=(8-12)· R ов [19]. В ином случае большая ЭДС, наводящаяся в ОВ при пуске, приведет к большим перенапряжениям на зажимах. Принцип. Вращающееся магнитное поле статора, пересекая проводники короткозамкнутой пусковой обмотки, индуцирует в ней ЭДС и токи (так же, как это происходит и в АД). То есть, в момент пуска двигатель работает как асинхронный. При взаимодействии токов в короткозамкнутой обмотке с магнитным полем статора образуется электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приблизится к частоте вращения поля статора (s около 0,05), ОВ подключают к источнику питания. Двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, ЭДС и токи в ней не индуцируются, асинхронный пусковой момент становится равным нулю [26]. Недостаток: большие пусковые токи (в 5-7 раз больше номинального значения). Пуск мощного СД может вызвать значительное падение напряжения сети, что отражается на работе других потребителей. Для уменьшения пусковых токов применяют пуск при пониженном напряжении сети (понижение с помощью автотрансформатора) [39]. 3) Частотный пуск с помощью преобразователей частоты. В чем заключается проблема у СД при пуске? Ротор не успевает устремиться за вращающимся магнитным полем статора. Путь решения – при запуске СД постепенно увеличивать частоту напряжения (и скорость вращения вращающегося магнитного поля статора) от 0 до номинального значения. При этом темп увеличения частоты нужно выбрать таким, чтобы с одной стороны ротор успевал вращаться за полем статора, а с другой стороны, чтобы пуск осуществлялся за приемлемое время. Используется для запуска СД с возбуждением от постоянных магнитов, в которых на время пуска нельзя отключить магнитный поток.
Области применения СД 1) Нерегулируемые электроприводы большой мощности с продолжительным режимом работы, т.е. когда не требуются частые пуски, остановки и регулирование скорости вращения. Торможение этих двигателей, в основном, на выбеге [56]. Р н > 200 кВт [9], Р н > 300 кВт [16] и до Рн = 50 000 кВт [9]. При меньших мощностях более предпочтительны АД. При Рн > 300 кВт выгодно использовать синхронные двигатели с cos φH = 0,9 (перевозбуждение) и при Рн > 1000 кВт — с cos φн = 0,8 [9]. Синхронные двигатели обычно выполняются с возбудителем, посаженным на один с ними вал. Поэтому при малых мощностях они менее выгодны, чем асинхронные двигатели. Но, начиная со 100 кВт, а при низких частотах вращения и с меньшей мощности, синхронные двигатели в ряде случаев следует предпочесть асинхронным двигателям. Применение в системах возбуждения полупроводниковых выпрямителей вместо машинных возбудителей позволяет получить достаточно экономичные синхронные двигатели и при сравнительно небольших мощностях [19]. В последние годы положение существенно изменилось вследствие применения современных материалов (постоянные магниты) и средств управления (ключи на относительно большие токи и напряжения и т.д.). Электропривод с синхронными двигателями стал управляемым, существенно расширился диапазон мощностей, что позволило ему занять ведущие позиции в станкостроении, робототехнике, гибких производственных системах и т.п. 2) В качестве синхронных компенсаторов.
|
||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 196; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.153 (0.009 с.) |

 . Таким образом, число в обозначении ряда представляет собой степень корня из 10 и одновременно показывает количество членов в пределах ряда от 1 до 10 (исключая 10) [3].
. Таким образом, число в обозначении ряда представляет собой степень корня из 10 и одновременно показывает количество членов в пределах ряда от 1 до 10 (исключая 10) [3].