Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение места судна по пеленгам трех ориентировСодержание книги
Поиск на нашем сайте Обоснование способа. Для получения обсервованного места судна достаточно иметь две линии положения. Третий пеленг в рассматриваемом способе используют как контрольный. Контрольная линия положения позволяет при определении места судна решить ряд задач: обнаружить промах при опознании ориентиров или взятии отсчетов по компасу, обнаружить и устранить влияние ошибки в поправке компаса Три линии положения, проложенные на карте, пересекаются в однойточке в том случае, если наблюдения, вычисления и прокладка не содержали никаких ошибок. На практике линии пеленгов часто образуют треугольник, называемый треугольником погрешностей (рис 42). Причинами его появления могут быть:1) промахи при опознании ориентиров или при взятии отсчетов по картушке компаса 2) случайнее ошибки пеленгования. При нормальных условиях наблюдений они невелики и не приводят к появлению большого треугольника погрешности;
4) ошибки в поправке компаса, принятой для исправления пеленгов. Для установления причин появления треугольника погрешностей проводят анализ обсервации. Промахи в наблюдениях сразу же обнаруживаются из-за появления значительного треугольника погрешностей. Чтобы убедиться, что причиной этого не является промах, измерения пеленгов повторяют. Если после повторных наблюдений треугольник не уменьшился, причиной его появления следует считать значительную ошибку в поправке компаса. Следует изменить ее на 2 градуса в ту или другую сторону. Проложив пеленги, исправленные новой поправкой, получают на карте второй треугольник погрешности. Если измененное значение поправки компаса оказалось ближе к ее истинному значению, то второй треугольник уменьшится по сравнению с первым, и наоборот. Соединив сходные вершины этих треугольников отрезками прямых, получают в их пересечении точку.), которая является обсервованным местом судна, свободным от влияния систематической ошибки.
Практическое выполнение. Заблаговременно выбирают на берегу три ориентира с расчетом, чтобы углы между их пеленгами были от 60 до 120°, и намечают порядок пеленгования. В общем случае первыми берут пеленги ориентиров, расположенных дальше от траверза, т. е. на более острых курсовых углах. Направления на них меняются медленнее и, следовательно, неодновременность пеленгования меньше будет сказываться на точности полученного места. Ночью, чтобы сократить время между моментами пеленгования. этот порядок может быть изменен. Первыми пеленгуют маяки, на измерение пеленгов которых затрачивают больше времени. Например. если в видимости судоводителя. имеются проблесковые и постоянные огни, то первыми, дождавшись проблеска, пеленгуют проблесковые огни, затем постоянные. Точность способа. Способ определения места судна по трем пеленгам является одним из наиболее точных в судовождении. Он сочетает сравнительную простоту ведения наблюдений и вычислений с возможностью исключения промаха, а так же систематической ошибки в поправке компаса. Средняя квадратичная погрешность в обсервованном месте составляет от 0,1 до 0,3 мили. ЛАГ ИЭЛ-2М ЭКСПЛУАТАЦИЯ.
Эксплуатация лага. Подготовка и включение лага производятся в следующем порядке: 1) в клинкет устанавливается индукционный преобразователь первичной скорости (ИППС); 2) на блоке управления в центральном приборе 6 все органы управления выставляются в рабочее положение; 3) тумблер «отключение — сеть» в приборе должен быть переведен в положение «сеть»; 4) для включения лага тумблер «отключение — сеть» в приборе 6 устанавливается в положение «сеть». При этом в приборах 3 и 6 высвечиваются табло зеленого цвета; 5) в приборе б регулируется освещение шкалы счетчика пройденного расстояния. Тарировка лага включает установку рабочего нуля лага, определение начальных погрешностей, ввод в корректор линейной и нелинейной поправок и определение остаточных погрешностей. Тарировка лага должна проводиться базовыми специалистами (судовые специалисты могут выполнить тарировку, руководствуясь инструкцией по эксплуатации в техническом описании лага).
3.РАСЧЕТ СКОРОСТИ БУКСИРОВКИ И ДЛИНЫ БУКСИРНОЙ ЛИНИИ. Морская буксировка может быть запланированной и вынужденной. Все расчеты связанные с плановой буксировкой выполняют заблаговременно в КБ с учетом особенностей предстоящей операции: числа и типов буксирных судов и буксирных объектов, вида буксирной линии (однородная, неоднородная, несимметричная и пр.),предполагаемых погодных условий, районов плавания(узкости, мелководье). Эти расчеты выполняются по существующим методикам, одобренным Регистром, и выдаются в виде чертежей и рекомендаций для выполнения буксировочной операции. При вынужденной буксировке капитан буксировщика обязан выполнить расчеты скорости буксировки, а также элементов буксирной линии(длины,толщины троса и его провиса).задача может свестись к выбору безопасной скорости буксировки, при которой прочность имеющегося буксирного троса оказалась бы достаточной. Поскольку при вынужденной буксировке капитан не всегда может располагать точными сведениями о буксируемом объекте, расчеты приходится вести с использованием простейших имперических формул. Скорость буксировки в обычных нештормовых условиях определяют расчетом сопротивления воды и воздуха движению как буксируемому так и буксирующего судов. Максимальной скоростью при буксировке будет та,при которой сопротивление буксирующего и буксируемого судов в сумме составят силу равную упору винта. Рш = Rо= R1 + R2,где Рш – максимальный упор винта буксировщика, кН; Rо – суммарное сопротивление; R1- сопротивление буксирующего судна; R2 – сопр. Буксируемого судна, кН. При этом скорость буксировки будет определяться тягой на гаке буксировщика Тг= Рш –R1. разница между упором винта на полном ходу и сопротивлением буксирующего судна при уменьшенной скорости движения и есть та сила которая используется на продвижение буксируемого судна. Максимальная скорость при буксировке будет та V при которой сопротивления буксирующ. И буксируем. Судов в сумме составляют силу равную упору винта Рш(буксир). Эту скорость легко определить если построить суммарный график сопротивления и буксирующ. И буксируемых судов в зависимости от скорости. Расчет производится в следующем порядке: 1. определ. Maxim упор винта буксира или сопротивл. Воды движению буксирующего судна при скорости,которое равно упору винта при швартовном режиме. Рш= 0,136 Ni, Рш –упор винта кН; Ni – индикаторная мощность главной силовой установки кВт. 2. определяем сопротивления буксирующего и буксируемого судов (сопротивление буксирного троса прибавляется к сопротивлению буксируемого судна)на различных скоростях буксировки. 3. составляется таблица сопротивлений R 1 (Vб), R2(Vб), R0(Vб) и строят график R0и R2 по которым потом определяется V буксировки и силы тяги на гаке для определения толщины троса:R1=Rф+ Rс+Rвозд+Rв;R2= Rф'+ R'с+R'возд+R'в +R'зв.+R'тр. Rф- сопротивление трения,Rс- остаточное сопротивление кН,Rвозд- сопротивление воздуха,Rв –сопротивление от волнения, R'зв – сопротивление застопоренного винта,R'тр – сопротивление буксирного троса. (Со штрихом это буксируемое судно). Запас прочности в буксирной линии должен равняться пяти если тяга на гаке не превышает 100 кН,или трем если тяга на гаке более 300кН. расчет рабочей длины троса(в м) определяется по эмперической формуле
При подходе к портам при плавании в каналах и узкостях проводка судов осуществляется с помощью лоцманов. Однако наличие лоцмана на судне не снимает ответственности с капитана за безопасность судна, поэтому во всех случаях лоцман должен рассматриваться лишь как советчик. следовательно нужно хорошо знать условия плавания в данном районе, вести тщательную прокладку пути судна и контролировать все действия лоцмана. Лоцмана следует проинформировать о маневренных качествах судна, состоянии и поправках навигационных приборов, которые предполагается использовать при переходе. Лоцман, со своей стороны, обязан познакомить капитана со всеми особенностями проводки судна в данном районе. Успех лоцманской проводки во многом зависит от того, насколько четко организована штурманская служба. При следовании фарватерами с ограниченным запасом глубины под килем нужно заранее учесть возможное увеличение осадки от хода и крена судна. Как показывают наблюдения при скорости!%-16 уз осадка на мелководье может значительно увеличиться. Влияние крена приблизительно можно учесть соотношением 5. ИСПОЛЬЗОВАНИЕ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ ДЛЯ ОЦЕНКИ СИТУАЦИИ И СТЕПЕНЕЙ ОПАСНОСТИ ЦЕЛЕЙ. Если судно-наблюдатель или цель или то и другое вместе будут двигаться, эхо-сигнал будет перемещаться на экране индикатора, оставляя за собой слабый светящийся след послесвечения- хвост. Перемещение эхо- сигнала на экране индикатора относительного движения является результатом взаимного перемещения двух объектов: судна- наблюдателя и цели. Линия перемещения эхо-сигнала называется(ЛОД). Обнаружив присутствие другого судна только с помощью РЛС, наблюдатель должен прежде всего определить, развивается ли ситуация чрезмерного сближения и (или) существует ли опасность столкновения. Если ЛОД проходит через начало развертки или вблизи его, то опасность столкновения существует. критериями опасности столкновения судов является основные обстоятельства встречи – расстояние кратчайшего сближения судов D кр и время от последнего момента наблюдений до момента кратчайшего сближения t кр. ситуация чрезмерного сближения существует при D кр< D зад. чем меньше D кр и t кр тем больше степень опасности столкновения. В некоторых случаях определяются дополнительные обстоятельства встречи- дистанция пересечения курса D пер, время до пересечения курса t пер, относительный курс Ко и относительная скорость Vо. Если существует опасность столкновения и (или) чрезмерного сближения, то необходимо своевременно предпринять надлежайшие действия для расхождения на безопасном расстоянии. Для принятия правильного решения важно знать элементы движения других судов; т.е. их курсы и скорости. Обстоятельства встречи и элементы движения судов опытным наблюдателем могут быть оценены ориентировочно по послесвечению, наблюдаемому на экране. Более точно обстоятельства встречи и элементы движения судов определяются графической прокладкой. Различают прокладку истинную и относительную. Если нна экран индикатора обнаружены эхо-сигналы нескольких судов, то на основании глазомерной оценки ситуации выбирают для прокладки опасные и потенциально опасные цели. Потенциально опасными называют цели, которые в данный момент ен опасны, но могут стать опасными при предполагаемом маневре нашего судна или вероятном маневре цели.
Билет № 19
|
||
|
|
Последнее изменение этой страницы: 2016-12-11; просмотров: 523; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.150 (0.008 с.) |

 3) ошибки от неодновременного взятия пеленгов. Эти ошибки проявляют себя при скорости судна, больней 15—18 уз, и небольших (2~ 3 мили) расстояниях до ориентиров. Для исключения влияния ошибки взятые пеленги приводят к одному моменту, измеряя их в таком порядке: три пеленга берут в обычной последовательности, а затем повторно измеряют пеленги второго и вслед за этим первого ориентира. Время и отсчет лага замечают при взятии третьего пеленга. Для исправления поправкой компаса и прокладки на карте получают три отсчета компасных пеленгов
3) ошибки от неодновременного взятия пеленгов. Эти ошибки проявляют себя при скорости судна, больней 15—18 уз, и небольших (2~ 3 мили) расстояниях до ориентиров. Для исключения влияния ошибки взятые пеленги приводят к одному моменту, измеряя их в таком порядке: три пеленга берут в обычной последовательности, а затем повторно измеряют пеленги второго и вслед за этим первого ориентира. Время и отсчет лага замечают при взятии третьего пеленга. Для исправления поправкой компаса и прокладки на карте получают три отсчета компасных пеленгов Пользоваться описанным приемом для нахождения верного, места судна следует только в том случае, если значение сторон треугольника погрешности 0,5 мили и более. Если его стороны меньше указанного значения, то вероятное место судна принимают в центре треугольника, относя причину его возникновения к случайным ошибкам.
Пользоваться описанным приемом для нахождения верного, места судна следует только в том случае, если значение сторон треугольника погрешности 0,5 мили и более. Если его стороны меньше указанного значения, то вероятное место судна принимают в центре треугольника, относя причину его возникновения к случайным ошибкам. , f- стрелка провиса буксирной линии,м; Тг –тяга на гаке, Н,определенная по графику; q- линейная плотность буксирного троса,кг/м. если на судне имеется один штатный буксирный трос, то по сертификату определяется его разрывная прочность, из которой обратным входом можно получить предельную тягу на гаке и соответствующее ей значение предельно возможной для данного троса и сопротивления буксируемого объекта скорости буксировки. Длина буксира должна быть:1. кильватерная струя буксировщика не оказывала тормозящего действия на буксируемое судно.2. управляемость буксируемого судна была удовлетворительной. 3. провес и упругая деформация были достаточными для смягчения рывков буксирного каната, которые возникают вследствие качки рыскания.4. было возможно свободное орбитальное бдвижение обоих судов на волнении.
, f- стрелка провиса буксирной линии,м; Тг –тяга на гаке, Н,определенная по графику; q- линейная плотность буксирного троса,кг/м. если на судне имеется один штатный буксирный трос, то по сертификату определяется его разрывная прочность, из которой обратным входом можно получить предельную тягу на гаке и соответствующее ей значение предельно возможной для данного троса и сопротивления буксируемого объекта скорости буксировки. Длина буксира должна быть:1. кильватерная струя буксировщика не оказывала тормозящего действия на буксируемое судно.2. управляемость буксируемого судна была удовлетворительной. 3. провес и упругая деформация были достаточными для смягчения рывков буксирного каната, которые возникают вследствие качки рыскания.4. было возможно свободное орбитальное бдвижение обоих судов на волнении.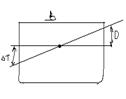 4. МЕСТНЫЕ ПРАВИЛА МОРСКИХ И ТОРГОВЫХ ПОРТОВ.СПОСОБЫ ПРОВОДКИ СУДОВ В ПОРТАХ И КАНАЛАХ. ИСПОЛЬЗОВАНИЕ БРЛС. На подходах к крупным портам и в узкостях с интенсивным движением судовые РЛС не всегда обеспечивают безопасное плавание при плохой видимости. В таких районах все более широкое применение получают береговые РЛС, обеспечивающие централизованное диспетчерское руководство движением всех судов в зоне действия станции. Это дает возможность выполнить проводку судна с высокой точностью применяются активный и пассивный методы проводки судов с помощью БРЛС. Активный предполагает полное управление всеми маневрами судна с поста управления береговой РЛС по радиотелефону. Для этой цели на экране РЛС наносится электронным путем ось фарватера или его бровки и оператор глазомерно или с помощью сопряженной ЭВМ определяет положение судна относительно этих ориентиров,передавая необходимые команды на судно. Однако этот метод, обеспечивая высокую точность на прямолинейных участках фарватера, не дает хороших результатов на извилистых фарватерах, так как даже лучшие БРЛС пока не обеспечивают быстрого определения направления движения судна с требуемой точностью. Кроме того оператор не зная маневренных элементов судна, не всегда может дать правильные команды. Поэтому большее распространение получил пассивный метод проводки, при котором с поста управления береговой РЛС регулярно передается на судно его место, а управление судном осуществляет капитан(лоцман). Информация о месте судна содержит данные о пеленге и расстоянии судна до станции или о пеленге и расстоянии до ближайших,а иногда условных ориентиров (ось канала,точка поворота и т.д.). для определения пеленга и расстояния между судном и каким –либо ориентиром на береговых РЛС используются специальные электронные устройства, которые быстро и точно обеспечивают получение необходимых данных. При интенсивном движении перед началом проводки необходимо опознать судно с БРЛС., для чего оно должно выполнить какой –либо отличительный маневр. При большой протяженности фарватера для проводки устанавливается несколько БРЛС, причем управление в этом случае может быть также сконцентрированно в одном пункте, куда выводятся индикаторы от всех РЛС.
4. МЕСТНЫЕ ПРАВИЛА МОРСКИХ И ТОРГОВЫХ ПОРТОВ.СПОСОБЫ ПРОВОДКИ СУДОВ В ПОРТАХ И КАНАЛАХ. ИСПОЛЬЗОВАНИЕ БРЛС. На подходах к крупным портам и в узкостях с интенсивным движением судовые РЛС не всегда обеспечивают безопасное плавание при плохой видимости. В таких районах все более широкое применение получают береговые РЛС, обеспечивающие централизованное диспетчерское руководство движением всех судов в зоне действия станции. Это дает возможность выполнить проводку судна с высокой точностью применяются активный и пассивный методы проводки судов с помощью БРЛС. Активный предполагает полное управление всеми маневрами судна с поста управления береговой РЛС по радиотелефону. Для этой цели на экране РЛС наносится электронным путем ось фарватера или его бровки и оператор глазомерно или с помощью сопряженной ЭВМ определяет положение судна относительно этих ориентиров,передавая необходимые команды на судно. Однако этот метод, обеспечивая высокую точность на прямолинейных участках фарватера, не дает хороших результатов на извилистых фарватерах, так как даже лучшие БРЛС пока не обеспечивают быстрого определения направления движения судна с требуемой точностью. Кроме того оператор не зная маневренных элементов судна, не всегда может дать правильные команды. Поэтому большее распространение получил пассивный метод проводки, при котором с поста управления береговой РЛС регулярно передается на судно его место, а управление судном осуществляет капитан(лоцман). Информация о месте судна содержит данные о пеленге и расстоянии судна до станции или о пеленге и расстоянии до ближайших,а иногда условных ориентиров (ось канала,точка поворота и т.д.). для определения пеленга и расстояния между судном и каким –либо ориентиром на береговых РЛС используются специальные электронные устройства, которые быстро и точно обеспечивают получение необходимых данных. При интенсивном движении перед началом проводки необходимо опознать судно с БРЛС., для чего оно должно выполнить какой –либо отличительный маневр. При большой протяженности фарватера для проводки устанавливается несколько БРЛС, причем управление в этом случае может быть также сконцентрированно в одном пункте, куда выводятся индикаторы от всех РЛС. , где Δ Т – увеличение осадки; Θ- угол крена град; В- ширина судна см.рис. при входе в устьевые порты следует учитывать и изменение осадки из- за уменьшения солености воды. При подходе к лоцманской станции необходимо так маневрировать работой машины, чтобы судно имело скорость, при которй прием лоцмана не вызывает трудностей. Для предварительного подсчета расстояний до лоцманской станции, на котором нужно дать реверс СТОП, может быть использована формула Кургузова:
, где Δ Т – увеличение осадки; Θ- угол крена град; В- ширина судна см.рис. при входе в устьевые порты следует учитывать и изменение осадки из- за уменьшения солености воды. При подходе к лоцманской станции необходимо так маневрировать работой машины, чтобы судно имело скорость, при которй прием лоцмана не вызывает трудностей. Для предварительного подсчета расстояний до лоцманской станции, на котором нужно дать реверс СТОП, может быть использована формула Кургузова:  где S – расстояние до лоцманской станции,кб; Δ V –разность скоростей (Vo –V н), с которой идет судно Vo и которую желательно иметь у лоцманской станции Vн уз; t0,5 –время за которое судно уменьшает скорость при реверсе СТОП с Vo до половины при данной загрузке, мин
где S – расстояние до лоцманской станции,кб; Δ V –разность скоростей (Vo –V н), с которой идет судно Vo и которую желательно иметь у лоцманской станции Vн уз; t0,5 –время за которое судно уменьшает скорость при реверсе СТОП с Vo до половины при данной загрузке, мин