Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структура системы активной безопасности автомобиля.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
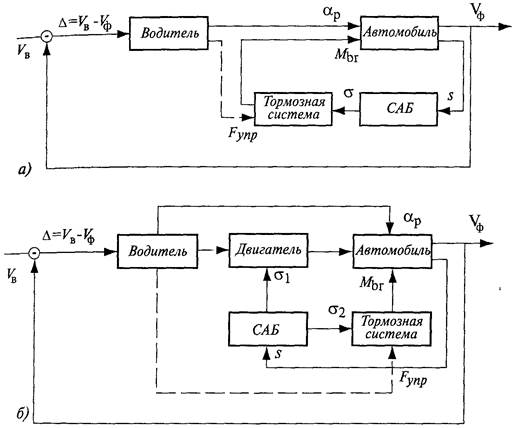
Из анализа указанных схем следует однозначный вывод о том, что ядром любой САБ является тормозная система. Тормозная система современного автомобиля, наряду с решением традиционных задач (уменьшение скорости, вплоть до его полной остановки, либо удержание автомобиля на месте), используется системами активной безопасности для обеспечения устойчивости и управляемости путем регулирования параметров сцепления колеса с дорогой, активно взаимодействуя при этом с другими компонентами автомобиля, как в тормозном, так и в тяговом режиме.
Таким образом, роль тормозного привода автомобиля качественно меняется — он может выступать и самостоятельной системой управления, и «подсистемой», объектом управления системы более высокого порядка. Кроме этого, анализ различных классов САБ позволяет сделать ряд других важных выводов: - произошел четкий переход от использования единичных, одноцелевых систем типа АБС или ПБС к применению интегрированных комплексов, охватывающих, по возможности, различные режимы движения; - конструктивно в процессе регулирования САБ практически всегда использует управление тормозным приводом, что позволяет наращивать интегрированную систему на базе АБС; - водитель транспортного средства не исключается из процесса управления движением и является непременным звеном в цепи регулирования САБ; - функции САБ по выводу автомобиля из критической дорожно-транспортной ситуации дополняются введением новых функций, позволяющих спрогнозировать и упредить развитие таких ситуаций; - с точки зрения параметров регулирования в современных САБ тяговое и/или тормозное усилие управления регулируется с отслеживанием важнейших характеристик тормозной и тяговой эффективности, управляемости, устойчивости и безопасности движения транспортного средства: продольного и поперечного проскальзывания колеса, углов бокового и курсового увода, дистанции между автомобилями и др.
Рис. 7 - Схемы систем активной безопасности: а) для тормозного режима; б) для тягового и комбинированных режимов. VB — скорость автомобиля, задаваемая водителем; Vф — фактическая скорость автомобиля; ∆ — отклонение скорости; Fупр — усилие управления тормозным приводом; αр — воздействие на рулевое управление; Мт — тормозной момент; s — параметр регулирования САБ (например, проскальзывание колеса); σ — управляющий сигнал
Таким образом, для управления автомобилем в соответствии с текущей ситуацией все устройства, отвечающие за отдельные аспекты активной безопасности транспортного средства, должны быть интегрированы в единую систему активной безопасности на общей конструктивной и функциональной базе. Теоретическая основа такого единого комплекса должна быть универсальной для всех возможных режимов движения, чтобы система активной безопасности могла правильно реагировать на любую дорожно-транспортную ситуацию и сверх этого прогнозировать вероятный процесс движения мобильной машины. Вариант структурной схемы такого комплекса показан на рис. 8. Здесь представлены возможные основные параметры. В частных случаях их следует рассматривать применительно к конкретной системе активной безопасности. Все параметры движения одиночного колеса и автомобиля, участвующие в регулировочном процессе, можно сгруппировать по своему функциональному назначению в четыре блока. Первый блок определяет измеряемые напрямую величины. Исходя из назначения САБ и современного состояния в области сенсорики, целесообразно получать измерительные сигналы следующих параметров: - для колеса — давление в исполнительных аппаратах тормозной системы, угловая скорость колеса и ее производная, нормальная нагрузка на колесо, сила в контакте колеса с дорогой; - для автомобиля — реальная скорость автомобиля и ее производная, угол поворота рулевого колеса, инерционная скорость автомобиля, поперечное ускорение, дистанция до других транспортных средств или препятствий.
В следующем блоке представлены основные параметры, характеризующие динамику движения транспортного средства и являющиеся показателями качества регулирования. К ним следует отнести: - для колеса — проскальзывание колеса в боковом и продольном направлениях, момент сил в контакте колеса с дорогой; - для автомобиля — линейная скорость движения автомобиля, угол курсового увода автомобиля, инерционный момент автомобиля относительно вертикальной оси.
Третьим блоком является блок управляющих воздействий, в который входят давление в тормозном приводе или усилие управления тормозным механизмом и момент двигателя (крутящий момент, подводимый к ведущим колесам).
Завершающий блок составляют показатели, оценивающие работу системы активной безопасности. Эффективность САБ целесообразно оценивать по нескольким группам критериев: конструктивным, функциональным, экономическим, эксплуатационным и эргономическим. Исходя из опыта эксплуатации современных систем активной безопасности, первоначально можно выделить следующие конкретные оценочные показатели для их работы: - в тормозном режиме — достигаемый тормозной путь, среднее значение удельной тормозной силы в процессе регулирования, замедление автомобиля, обеспечиваемое остаточным объемом рабочего тела тормозного привода, - в тяговом режиме — ускорение при разгоне транспортного средства, максимальная скорость движения, удельная тяговая окружная сила, - во всех режимах движения — частота работы системы, угол курсового увода, расход рабочего тела, усилие и скорость поворота рулевого колеса, степень реализации сцепления колеса с дорогой, границы устойчивости и управляемости автомобиля
Рис. 1.20 Структурные блоки системы активной безопасности
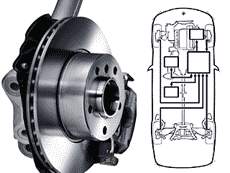
ТОРМОЗНЫЕ СИСТЕМЫ ABS Anti-lock Braking System Разработчик: Bosch
Антиблокировочная система тормозов делает то же самое, что и опытный водитель, только быстрее, точнее, эффективнее и без всякого участия человека. Достаточно сказать, что АБС за секунду делает до 25 циклов притормаживания, что абсолютно недостижимо даже для тренированных автоспортсменов. Поведение автомобиля при экстренном торможении: Без ABS (слева) и с ABS (справа)
BA Brake Assist (Система аварийного торможения) Электронная система управления давлением в гидравлической системе тормозов, которая в случае необходимости экстренного торможения и недостаточного при этом усилия на педали тормоза самостоятельно повышает давление в тормозной магистрали, делая это во много раз быстрее, чем на то способен человек.
DBC Dynamic Brake Control (Система динамического контроля за торможением) В экстренной ситуации около 90 процентов всех водителей не в состоянии выполнить экстренное торможение. При этом характерно, что, несмотря на быстрое нажатие педали, они давят на нее с недостаточной силой. "Последующее" увеличение усилия, прикладываемого к педали, лишь незначительно увеличивает тормозную мощность. Тем самым тормозная мощность используется лишь частично, в результате чего в экстренной ситуации может не хватить нескольких ценнейших метров тормозного пути, которые могли бы спасти жизнь.
EBS Electronic Braking System (Электронная система торможения) Педаль тормоза в EBS не имеет механической связи с тормозной системой (так называемая электронная педаль). Ее перемещение преобразуется в электрический сигнал и подается блоку управления. После анализа информации от различных датчиков (нагрузка, скорость, поперечное ускорение, угол поворота рулевого колеса), электроника самостоятельно дает команду исполнительным механизмам, регулирующим давление в контурах тормозной системы. EBV (Система электронного распределение тормозных сил) Устройство, входящее в состав ABS пятого поколения. Контролирует поведение всех колес по отношению друг к другу и с помощью электроники регулирует тормозное усилие в соответствии со степенью нажатия на педаль тормоза и загрузки автомобиля. HAH
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 838; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.103 (0.008 с.) |