Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
SoftwareSerial(rxPin, txPin)Содержание книги Поиск на нашем сайте Описание: Создает новый объект SoftwareSerial object Параметры: rxPin: вывод, используемый для приема данных txPin: вывод, используемый для передачи данных Пример: #define rxPin 2 #define txPin 3 // создадим новый порт SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin); SoftwareSerial: begin(speed) Описание: Устанавливает скорость обмена информацией. Работает только до 9600бод. Параметры: speed: скорость (long) Пример: // include the SoftwareSerial library so you can use its functions: #include <SoftwareSerial.h> #define rxPin 2 #define txPin 3 // set up a new serial port SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin); void setup() { // define pin modes for tx, rx: pinMode(rxPin, INPUT); pinMode(txPin, OUTPUT); // set the data rate for the SoftwareSerial port mySerial.begin(9600); } void loop() { //... }
SoftwareSerial: int read() Описание: Читает символ на выводе приема данных. Эта функция ждет символ, читает его затем возвращет. Данные, переданные в другое время будут потеряны. Возвращает: Прочитанный символ Пример: SoftwareSerial serial(6, 7); void setup() { serial.begin(9600); } void loop() { char c = serial.read(); }
SoftwareSerial: print(data) Описание: Передает данные в последовательный порт. Работает также как и Serial.print(). Параметры: смотри Serial.print()
SoftwareSerial: println(data) Описание: Пишет данные в последовательный порт, завершая их переносом строки и возвратом каретки.работает также как и функция Serial.println(). Параметры: Смотри Serial.println()
Пример: SoftwareSerial serial(6, 7); int analogValue; void setup() { serial.begin(9600); } void loop() { // read the analog input on pin 0: analogValue = analogRead(0); // print it out in many formats: serial.print(analogValue); // print as an ASCII-encoded decimal serial.print("\t"); // print a tab character serial.print(analogValue, DEC); // print as an ASCII-encoded decimal serial.print("\t"); // print a tab character serial.print(analogValue, HEX); // print as an ASCII-encoded hexadecimal serial.print("\t"); // print a tab character serial.print(analogValue, OCT); // print as an ASCII-encoded octal serial.print("\t"); // print a tab character serial.print(analogValue, BIN); // print as an ASCII-encoded binary serial.print("\t"); // print a tab character serial.print(analogValue/4, BYTE); // print as a raw byte value (divide the // value by 4 because analogRead() Возвращает: numbers // from 0 to 1023, but a byte can only hold values // up to 255) serial.print("\t"); // print a tab character serial.println(); // print a linefeed character // delay 10 milliseconds before the next reading: delay(10); } StepperLibrary
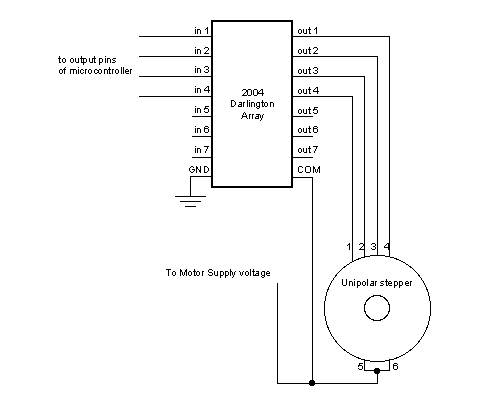
Эта библиотека позволяет вам управлять униполярными и биполярными шаговыми двигателями. Вам понадобится сам шаговый двигатель и драйвер, чтобы им управлять.
Схемы подключения: униполярные двигатели Биполярные двигатели
Функции: Stepper(steps, pin1, pin2) Stepper(steps, pin1, pin2, pin3, pin4) setSpeed(rpm) step(steps)
Stepper(steps, pin1, pin2) Stepper(steps, pin1, pin2, pin3, pin4) Описание: Эта функция создает новый класс, который определяет подключение шагового двигателя к платформе Arduino. Поместите ее в начало скетча, до функций setup() и loop(). Число параметров зависит от подключения вашего двигателя к плате - посредством двух или четырех проводов. Параметры: steps: Число шагов на один оборот вашего двигателя. Если вам известен угол поворота на один шаг, разделите 360 на этот угол и получите количество шагов на оборот. (int) pin1, pin2: два провода, подключенные к двигателю (int) pin3, pin4: опционально: два последних провода, если мотор подключен посредством 4-х проводов (int) Возвращает: новый объект класса Stepper. Пример: Stepper myStepper = Stepper(100, 5, 6);
Stepper: setSpeed(rpms) Описание: Устанавливает частоту вращения шагового двигателя в оборотах в минуту. Для установки количества шагов используйте функцию step(). Параметры: rpms: скорость, с которой двигатель должен вращаться в оборотах в минуту - положительное число (long)
Stepper: step(steps) Описание: Устанавливает определенное количество шагов мотора, со скоростью, определенную функцией setSpeed(). Эта функция блокиреует работу программы до завершения движения ротора. Например, вы установили скорость 1об/мин и 100 шагов для 100-шагового двигателя. В итоге, функция будет выполняться целую минуту. Для лучшего контроля, устанавливайте большую частоту вращения и двигайтесь на малое количество шагов. Параметры: steps: число шагов мотора - положительное число для одного направления, отрицательное - для другого. (int) Униполярный 2 провода
Униполярный 4 провода
Биполярный 2 провода
Биполярный 4 провода
Wire Library Эта библиотека позволяет общаться с другими устройствами по протоколу I2C / TWI. На большинстве платформ Arduino, SDA (линия данных) находится на аналоговом порту 4, и SCL (линия тактирования) на аналоговом порту 5. На платформе Arduino Mega, SDA на цифровом порту 20 и SCL на 21.
Примечание: Существуют 7- и 8- битные вервии I2C адресации. 7 бит идентифицируют устройство, а 8-й бит определяет, будут ли на устройство отправлены данные, или считаны с него. Данная библиотека использует 7-юитную адресацию. Если исходный код содержит 8-битную адресацию, то вам понадобится отбросить младший бит (сдвинув значение на 1 бит вправо). используя адреса между 0 и 127.
Wire.begin() Wire.begin(address) Описание: Инициализирует библиотеку и подключается в шине I2C как master или slave. Параметры: address: 7-бит адрес слейва (опционально); если не определено, то устройство у нас мастер.
|
||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 733; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.64 (0.007 с.) |